基于NI运动控制卡的多轴运动控制研究
2018-08-15 02:18刘丰豪崔思柱
现代制造技术与装备 2018年7期
刘丰豪 程 石 崔思柱 曹 翱 肖 倩
(长安大学 工程机械学院,西安 710064)
随着工业技术特别是自动化技术的迅速发展和更新换代,现代工业设备对于运动过程中的精度控制要求越来越高。但是,工业产品的质量要求和工艺技术十分复杂,一台电机已经远远不能满足生产设备的要求,这就迫切需要协调多个电机一起运动实现工作要求。而在多个电机完美协调运动的背后,需要高级的硬件控制设备及精密的运动控制算法来实现。传统老旧的控制方式或者说是对于精度要求不高的场所,往往采用微机或单片机的控制方式来实现位置控制,位置精度很低,整机设计复杂且运行速率很慢[1-2]。因为这种工作方式效率低下,人们研发出一种先进的方式——“PC+运动控制卡”。Labview作为一种简便高效的图形化编程语言,可以非常快速地实现程序的编写、软件开发,操作界面清晰明了,通过对运动控制卡的实时控制来实现对于单个或多个伺服电机的精确位置控制[3]。
1 运动控制发展
运动控制技术的发展不仅代表着工业技术的发展水平和行业的兴衰,也促进了人类社会生产劳动的进步。运动控制技术于20世纪40年代产生,到今天越来越趋于数字化、网络化以及智能化,可以说运动控制发展反映出了现代工业的前进方向和发展趋势。但是,对于智能化工业,单一的控制方式无法满足快速发展的工业技术要求,因此为了实现多轴运动控制,世界各地的企业都开始进行多轴运动控制器的研发与生产。通常来说,一个完整的运动控制系统硬件主要包括以下几部分:上位控制器、驱动装置、电机、执行机构以及检测反馈元件等。
2 硬件框架搭建
硬件设备主要来自于NI公司的PXI控制系统系列,主要有PXIe-1071机箱、PXIe-8821控制器、PXI-7358运动控制卡、PXIe-1071机箱、UMI-7774运动接口板以及第三方公司的驱动器与伺服电机等。其具体控制平台搭建如图1所示。
PXIe-1071是一款具有4个插槽、高达3GB/s的PXI机箱。PXIe-1071机箱的4个外设插槽都为混合兼容的,支撑PXI和PXIe模块,在此平台中内插PXIe-8821控制器以及PXI-7358运动控制卡。
PXIe-8821是基于Intel Core i3的PXI嵌入式控制器。PXIe-8821包含一个10/100/1000 BAsE-TX(千兆位)以太网端口、两个高速UsB端口、两个UsB 3.0端口以及一个集成硬盘驱动器、串行端口和其他外设I/O。

图1 硬件框架控制平台
在NI的7350系列中,无论是在控制电机轴的数量上,还是能够实现的功能上,PXI-7358都是最优秀、最高级的运动控制卡。一方面,PXI-7358运动控制卡提供完全可编程的运动控制,可用于多达8个独立轴的运动控制;另一方面,PXI-7358是拥有双处理器的运动控制卡,被用于嵌入式实时控制。
UMl-7774作为一款独立的连接附件,其设计就是为与PXI 73xx系列运动控制器一起使用,最多可同时使用四个轴。UMI-7774非常适合工业和实验室应用,将第三方步进和伺服驱动器(放大器)以及反馈和数字I/O连接至运动控制器。
3 软件系统开发
本次程序框架采用图形化编程语言Labview进行人机交互界面和系统程序开发,通过NI-Motion驱动进行运动程序编写,通过其配置软件MAX对系统参数及功能进行设置或修改。为了让用户更好地开发和编写运动控制程序,Labview软件中自带的73xx模块提供了许多可直接调用编写的封装式函数,编写程序只需要根据实际的运动轨迹要求和其他功能要求,直接拖动相应的函数模块便可实现要求的运动功能以及编写可操作化的用户界面,73xx模块主要包括:Initialize Controller、Axis & Resource Congiguration、Trajectory Control、Motion I/O 和Find Reference等。
3.1 系统参数配置
NI公司提供MAX配置软件,作为运动控制的第一步,通过在MAX页面上配置运动控制卡相关选项以设定自己系统各轴的参数,包括各轴的反馈参数设定以及程序控制周期等,根据实际控制需求进行单轴、双轴以至最多八轴的电机配置连接,实现多轴电机的运动测试。
3.2 单轴直线运动
基于位置的直线运动,从指定初始位置开始移动,通过加载加速度、速度等移动约束,最终到达指定的目标位置而生成运动轨迹。图2为自定义设置终点位置实现的单轴直线运动程序及轨迹。

图2 直线运动
3.3 两轴圆弧运动
圆弧运动通过在两轴构成的向量坐标空间——XY平面内进行运动,其移动路径由半径、起始角度以及行程角度确定。另外,同单轴的直线运动一样,圆弧运动也可以设置速度及加速度等移动约束。其两轴运动控制程序及前面板实际移动轨迹如图3所示。
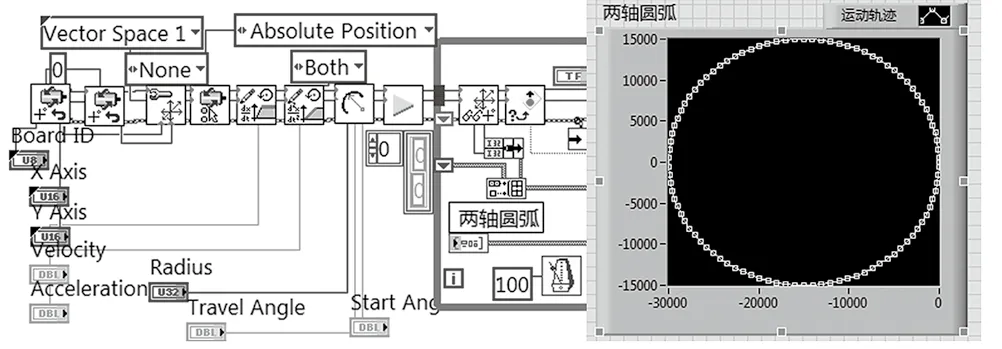
图3 圆弧运动
3.4 三轴螺旋线运动
螺旋线运动是在三维坐标空间中定义一个由弧组成的圆在XY平面中,并在Z轴上同步线性运动。弧是由半径、起始角度、行程角度和Z轴线性行程指定,线性行程是Z轴上螺旋弧所穿过的直线距离。图4即为螺旋线运动程序及轨迹。
4 结语

图4 螺旋线运动
在“PC+运动控制卡”的控制模式下,人们实现了单轴、双轴及多轴运动的电机运动控制。由此可见,这种控制模式不仅能够满足现代工业的多种运动控制需求,而且简便高效、执行效果完美。一方面,运用具有开发人机交互界面优势的图形化编程语言Labview和调用NI自带的73xx函数库,大大加快了程序编写及开发速度,最重要的是在满足控制多个电机的前提下,依然能够完成多种运动轨迹,保障位置控制的需求精度。另一方面,对于后期的总体控制程序,对上述多种运动控制程序的模块化封装及调用,可以大大缩减开发周期及用户成本,提升程序编写效率,构建简洁明了的用户界面。
猜你喜欢
机电工程技术(2022年8期)2022-09-22
中学生数理化(高中版.高考理化)(2021年11期)2022-01-18
装备制造技术(2020年4期)2020-12-25
电子技术与软件工程(2020年6期)2020-02-03
科技创新与应用(2019年32期)2019-12-02
大众科学·上旬(2019年10期)2019-10-21
振动与冲击(2018年14期)2018-08-02
制造技术与机床(2017年3期)2017-06-23
汽车文摘(2015年1期)2016-01-13
中国造纸(2014年1期)2014-03-01