基于双端弱同步的配电网行波测距方法
2018-08-20 07:32陆于平
电力自动化设备 2018年8期
靳 维,陆于平
(东南大学 电气工程学院,江苏 南京 210096)
0 引言
根据能源局“十三五”规划,农网类型配电网是重点投资对象。配电网拓扑结构复杂多变,故障点的准确定位一直是一个难题。配电网故障定位主要有阻抗法和行波法[1]。当前,分布式电源(DG)大量接入配电网,阻抗法的测量精度易受非周期振荡分量成分的影响。行波法由于利用暂态信号,测量时间短、测量精度高,受到了广泛应用[2-3]。
当前基于时域分析的行波法主要有单端法、双端法和单双端混合法。单端法主要利用故障点反射波和对侧母线反射波到达检测点的时刻不同,计算故障点位置。但是故障点反射波与对侧母线反射波难以区分,而且对于拓扑结构复杂的配电网,非故障线路的反射波会混合进来,波头来源的准确辨识将更加困难,单端法的应用受到限制。双端法只需要识别两侧的首波头,不受反射波的影响,但是要求双端必须同步。双端互感器的传变特性差异与全球定位系统(GPS)的对时误差会对测距的精度产生极大的影响。而且配电网加装高精度GPS装置的成本极高,且在当前电力系统中较难实现。单双端混合法也需要双端同步对时,与双端法存在同样的问题[4-7]。
文献[8]提出了一种双端行波测距方法,消除了波速的影响,但是没有考虑互感器传变特性差异与同步对时误差的影响;文献[9]提出建立一种模型对波速进行归一化计算,但实质上波速对故障定位精度的影响远小于双端同步误差带来的影响,并未从根本上解决此问题;文献[10]利用零模与线模波头时差确定大致的故障区间,再用单端定位法判定精确的故障位置,由于配电网线路短,波速相差并不大,造成零模与线模波头时差很小、测量误差太大,大量仿真结果表明该方法在配电网中的适用性较差;文献[11]利用非故障线路反射波区分故障线路的故障点反射波与对侧反射波,但是该方法同样需要同步对时,且需要加装设备,使得问题更加复杂化。
本文提出了双端弱同步的行波测距方法,利用两端行波检测装置独立地进行数据分析与处理,再通过通信进行信息交互,并不需要双端严格同步。首先,双端装置实时分析检测信号,故障发生后当检测到初始行波波头时启动时刻记录,将在特定时间内波头的相对时刻组成时间序列传输到对端。当接收到对端时间序列后,与本端记录的时间序列进行综合比较,根据相互映射关系排除干扰的因素,得出仅与故障点位置相关的时刻,从而计算精确的故障位置。本文方法仅要求双端可以通信即可,并不需要双端同步对时,这在配电网中极易满足,具有较好的应用前景。
1 行波波头检测与时刻提取
行波信号本质上是一种突变的电磁波信号,在系统发生故障时产生。传统的傅里叶变换应用于平稳信号时更有效,其无法准确描述信号的细节特征,在处理非平稳信号时将引起很大误差。而小波分析恰好可以弥补傅里叶变换的缺点,其通过尺度调节实现频域和时域的平衡,通过平移或伸缩变换找到模极大值,对突变信号具有更为优越的识别能力。行波波头为突变信号,突变点位置与小波变换模极大值点一一对应,可以通过小波变换模极大值点检测行波波头[12-13]。
不同的母小波描述函数的光滑程度、度量频域能量集中程度的效果是不同的。常用的Daubeehies[14-15]分析行波信号的能量特性[2]见附录中表A1。
文献[15]的研究表明,具有高阶暂态奇异性的电力暂态信号必须选择具有相当消失矩的小波基,低频载波中检测弱暂态,应尽量选择中心频率较高的小波基。通过表A1可知,Db6小波的中心频率最高,而行波本质上是一种能量的体现,因此Db6母小波是更优的选择。本文主要提取受外界环境影响较小的线模行波信号,这需要对三相系统进行相模变换,而常用相模变换有Clarke变换、Karenbauer变换和Wedpohl变换等[16]。由于Karenbauer变换能够较好地还原行波的暂态特征,选择其作为相模变换方式更为合适。
2 双端弱同步的行波测距原理
2.1 双端时间序列获取
当配电线路发生故障后,故障点产生的行波从故障点向两端传输。行波传输过程中会在波阻抗不连续点发生折反射,假定线路上安装行波检测装置,行波波头均可被检测到。若将故障后首次行波波头时刻作为初始时刻,在Ts时间内检测到n+1次行波波头经过。将行波波头时刻用集合T表示,记为T={t1,t2,…,tn},可得出ti(i=1,2,…,n)为第i+1个行波波头时刻,称T为该检测点的行波时间序列。
2.2 线路故障后的行波波头时间序列

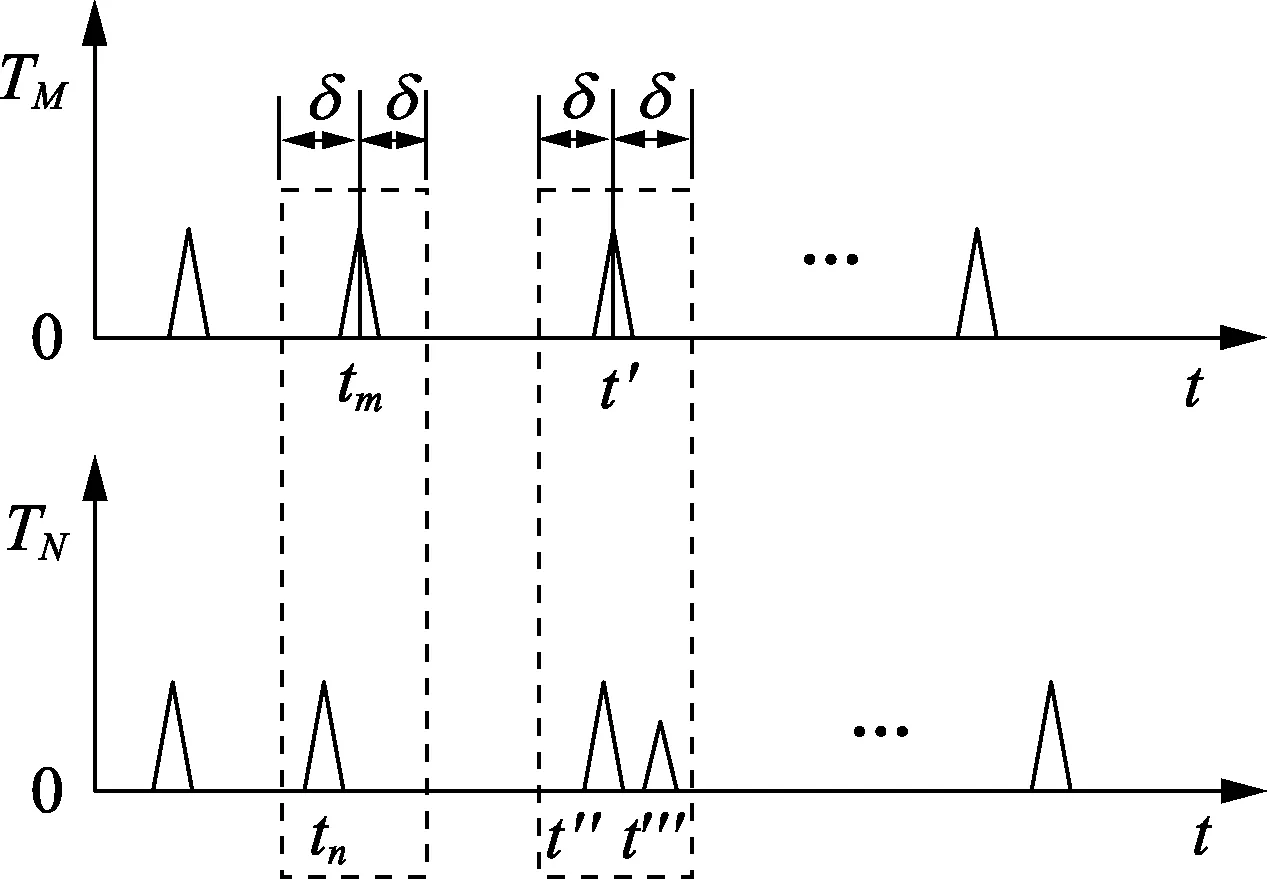
故障行波传输示意图如图1所示。线路MN之间的点F发生故障时,故障点反射波与对侧反射波传输路程均不大于2倍的线路长度。故行波波头时刻检测的开放时间设置为Ts=2LMN/v(LMN为线路MN的长度)。若行波在线路MF、NF上传输的用时分别为tMF、tNF(不妨设tMF 图1 与故障点相关的行波折反射示意图Fig.1 Schematic diagram of refracted and reflected traveling waves related to fault point 实际上线路并非无损耗线路,大量的实验数据与仿真表明,配电线路一般不长,分支较多,行波传输时易发生色散效应与能量损耗,特别是在波阻抗不连续较为明显的位置,行波折反射导致的能量分散效应极为明显,行波发生3次及以上折反射后,行波波头已难以识别并淹没在噪声中。故进行实际分析时,只考虑发生折反射3次以内的行波波头,而对于多次折反射的行波波头,因其能量远小于初始行波,将其作为干扰噪声。 当不考虑这些干扰因素时,以故障点靠近M端为例(故障点靠近N端与此类似),则有: (1) 其中,TM、TN分别为M、N端检测到的行波时间序列,作为集合的形式便于表示。若对双端时间序列取交集,则该交集的时刻反映故障点的位置,如式(2)所示。 TF=TM∩TN={2tMF,2tNF} (2) 因线路参数已知,波速容易求得,故可以直接根据时间序列交集计算故障点的位置。通过小波变换模极大值的方向和大小可以进一步判定故障点更靠近哪一端,目前已有不少方法被提出,如文献[17]根据母线类型利用极性进行判断,而本文将依据双端采集量利用反射系数的差异进行识别。 一般而言,波头的来源识别是行波测距的难点,当前多利用反射波头极性进行识别,但波头极性与母线的类型有关,而且识别复杂。本文利用双端母线反射系数的差异进行识别,首先根据式(2)得到双端的时刻数据对t1、t2(t1 若M、N处的反射系数分别为ρM、ρN,不妨设ρM>ρN。由于从故障点F来看,两端是对等的,无论行波从M端经过点F透射入N端,还是从N端经过点F透射入M端,其反射系数、透射系数是一致的,设定反射系数为ρF,透射系数为γF。 点F发生故障后产生向两端传输的行波大小相同、传输方向相反。若对其进行小波变换,假定变换后波头对应的模极大值为λ。因为采用线模分量,衰减较慢,而且配电网线路一般不长,故不考虑传输损耗,则M、N端在t时刻的模极大值fM(t)、fN(t)如表1所示。 表1 双端在不同时刻的模极大值Table 1 Modulus maximums of Terminal M and N at different times 根据行波折反射规律,M端在2tNF和2tMF时刻的模极大值分别为fM(2tNF)=ρNγFλ和fM(2tMF)=ρMρFλ。同理,N端在2tNF和2tMF时刻对应的模极大值分别为fN(2tNF)=ρNρFλ和fN(2tMF)=ρMγFλ。 假设故障点更靠近N端,则有2tNF<2tMF,所以t1=2tNF、t2=2tMF。从而有: (3) 因为ρM>ρN,故fM(t1) 若故障点更靠近M端,则2tNF>2tMF,则t1=2tMF、t2=2tNF。按照上述推导,可得出:fM(t1)>fN(t2)、fN(t1)>fM(t2)。 因此,一旦确定时刻数据对t1、t2(t1 需要说明的是,当ρM<ρN时可得出与上述相反的结论,即相当于双端互换;但当ρM=ρN时,无法用此方法判断,但是实际线路的两端一般并不相同,即ρM≠ρN,故基本均可用此方法判断。 图2为多支路辐射状配电网拓扑结构图。 图2 多支路辐射状配电网示意图Fig.2 Schematic diagram of multi-branch distribution radial network 故障点F处产生的行波不仅在M、N间发生折反射,还在非故障支路末端发生反射。以线路l11为例,故障线路行波从母线M透射入分支线路l11,经过线路l11末端反射后,再次被M端装置检测到,其他非故障支路类似。 设故障点靠近M端,记行波传输距离LMF、LNF、L1i、L2j的耗时分别为tMF、tNF、t1i、t2j(i,j=1,2,3,…)。为了考虑最复杂的情况,设L1i、L2j均小于线路MN的长度。不考虑多次折反射弱行波波头的干扰时,M、N端行波波头时刻组成的时间序列TM、TN为: (4) 同样可以利用式(2),得到与故障点位置相关时刻,据此计算故障点的位置。因此可以得出如下结论:通过获取故障后双端故障行波波头时间序列,分析该时间序列的交集时间元素,即可以计算得到故障点的位置。 在线路参数已知的情况下,可计算得到波速v。根据时刻和波速计算故障点与M、N端的距离LMF、LNF为: (5) 而通常情况下,线路参数给定值并不准确,若仅通过线路参数值估算波速,与实际波速存在差异,容易造成较大的误差,对于线路长度本身较短的配电线路而言,故障定位精度将大幅降低。分析发现故障点与两端的距离之和与线路总长度相等,而线路长度LMN一般是已知量,因此可以对式(5)进行简化,得: (6) 显而易见,通过式(6)计算故障点位置不再需要先估算波速,这从根本上避免了因线路所处环境不同而造成的波速差异的影响。 a. 双端同步性的影响。 传统双端行波测距法的精度依赖于双端同步对时的精度,在输电系统中,一般配置了多种对时设备,对时可靠性远高于配电网。此外输电线路一般较长,微小的同步误差对故障测距相对误差的影响不大,而配电网的线路长度较短,同步误差造成故障测距相对误差较大,使得故障测距失去意义。 本文提出的弱同步性方案,避免了同步对时误差情况下对故障测距的影响。传统双端行波测距法采用双端绝对时刻的比较,由于双端对时、计算时间的差异,将不可避免地带来同步性的问题。本文方案只计算单端时刻的相对坐标,其仅与行波波头的排列方式相关,而与对端的时刻无关。因此,本文方案并不需要双端的严格同步,而进行双端数据的比较时仅需要双端之间可以相互通信即可,这些条件在配电网中极易满足,在双端弱同步的情况下即可实现。 b. 双端互感器传变特性的影响。 行波信号的测量是通过互感器进行的,因此互感器特性的差异将影响到故障测距的准确性。将双端互感器的传输特性看作低通滤波器,τ为其时间常数。很显然,即便是同一厂家同一批次的互感器,参数τ也不一定相等,故双端互感器的传变特性也很难一致。 而行波信号主要是高频信号[18],通过互感器传输后,将不可避免地发生形变。当两端互感器差异较大时,两端信号波头时刻的识别偏差较大,这必然带来严重的故障测距误差,这是传统双端行波测距法的缺点。由于任一端互感器的传输特性是一定的,单端采集行波信号的差异并不严重,时刻识别误差具有一致性,本文方法采用相对误差,从而有效地降低了误差,减小了双端互感器不一致的影响。 c. 与双端GPS对时误差比较。 双端GPS对时测距的误差来自行波传输的色散效应、GPS同步对时误差、双端互感器传变特性的不一致。由于采用线模分量,传输色散效应并不是很明显,且配电线路一般不长,所以该部分误差可以忽略不计。当前采用的GPS同步对时误差一般为微秒级别,而双端行波测距误差为1 μs,测距误差为300 m。实质上,双端互感器传变特性不一致带来的故障测距误差更为严重,传变特性差异在时域上表现为时延,该时延可能达到数微秒,其对故障测距精度的影响远大于GPS对时误差带来的影响,这对于双端行波测距而言是致命的。 单端行波测距必须识别反射波到达时刻和确定波头时刻的反射来源。假定t0时刻为初始行波到达时刻,tx时刻为初次故障点反射行波到达时刻,ty时刻为初次对侧反射行波到达时刻。采用单端行波测距法时,tx和ty时刻的识别非常困难,主要会受其他线路反射波波头时刻和零模透射线模分量波头时刻的干扰。常用的方法是利用v(tx-t0)+v(ty-t0)=2l(l为线路长度)的约束条件去识别,但是这建立在线路长度l足够准确且波头时刻间隔相对较大的前提下,而实际上由于线路受到下垂效应等因素的影响,线路长度并不精确。此外配电网中线路长度一般较短,波头时刻间距较小,各种反射波头可能叠加在一起。而非故障线路反射波头时刻、零模透射线模分量波头时刻之间也可能互相形成数据对,使得故障测距错误。 由于配电网线路两端一般都是非对称的架构,非故障线路两端形成波头时刻一般并不相同。tx和ty时刻在两端都可被测量并可以形成数据对,非故障线路反射波时刻、零模透射线模分量波头时刻在双端形成数据对的可能性很低。即便是形成了数据对,也可以根据粗略的线路长度进行排除。tx和ty时刻的搜寻也不需要预先知道线路的准确长度,这就提高了方法的适应性。 由于行波传输过程中会发生色散效应,行波在行进过程中其形状会发生变化。利用模极大值点检测行波波头的准确时刻也会存在误差,即双端的时间序列TM、TN中严格意义相等的数据对时是不存在。因此需要引入误差因子δ,定义tm、tn分别为时间序列TM、TN中的元素,若|tm-tn|<δ,则认为tm、tn为数据对,然后用tδ=(tm+tn)/2替换原时间序列中的元素tm、tn,从而保证一定误差范围内的数据对搜寻。 此外为避免时间序列元素一对多情况的出现,某一时刻附近有2个行波波头,只取能量较大波头对应的时刻,以避免问题复杂化。由于δ取值固定且值不大,因此该误差在可控范围之内。 图3为双端行波时间序列示意图。图中,M端序列的t′对应于N端序列的t″,但由于行波折反射的复杂性,时刻t‴恰好在时刻t″附近,考虑到误差因素,t′可能与t″形成数据对,也可能与t‴形成数据对。为避免测量时刻一对多的情况,δ的值不能过大。但是δ的值也不能过小,否则极易造成无法形成数据的情况。本文设置搜索时间窗为1 μs,实际中最大测量误差不大于0.25 μs,故最大测距误差小于75 m。 图3 双端行波时间序列示意图Fig.3 Schematic diagram of traveling wave time-series of Terminal M and N 若要按照式(6)计算故障点位置,很显然首先需要得到tMF、tNF,当根据双端时间序列比较得到tMF、tNF后,如何判定此时刻是否与故障点有关,需要加以分析。由于电网中信号的复杂性,得到的时刻并不一定是正确的,因此需要先进行判定。因为线模行波的波速可以根据参数首先估算,所以可以利用此粗略的波速以及线路长度对得到的时刻进行验证,若定义: (7) 其中,e为初步估测误差。在理想情况下e=0,由于波速的准确性和波头时刻识别的误差的影响,e会在某个范围内变化,可以用阈值ε表示。故根据式(6),当e>ε时,则认为得到的tMF、tNF并不可靠,需要进一步处理;当e≤ε时,说明tMF、tNF是可靠的且故障点在区内,可以直接根据式(7)计算故障点位置,如果设置了行波保护,也可以通过此判断进行跳闸操作。这种方式可以极大地提高行波测距的可靠性,避免测距错误的出现。为了便于观测测距效果,可以根据式(6)的实际计算结果将式(7)修正为: (8) 上述实现过程和算法过程如附录中的图A2、A3所示。 采用PSCAD 仿真软件搭建10 kV中性点不接地配电网的仿真模型。仿真模型示意图如图3所示,模块参数见附录中的表A1、A2。 T1:110 kV/10 kV变压器T2—T7:10 kV/0.4 kV变压器图4 配电网仿真模型Fig.4 Simulation model of distribution network 根据已有的研究,配电网中行波信号的特征频率f、行波波速v、线路波阻抗不连续点之间的距离Lz之间的关系为f=v/(KLz)[18](K为整数),由于v与光速在一个数量级,Lz一般为1~10 km,测算和大量的仿真结果[18-19]均表明,配电网中的行波特征频率一般在数十至数百kHz。根据采样定理,采样频率一般选择为最高频率的4~10倍,为了尽可能地还原原始行波信号,本文仿真中采样频率设置为1 MHz, 特征频段高于输电网中行波的特征频段。 4.1.1 单相接地故障 线路l3在0.004 5 s经50 Ω过渡电阻发生单相接地故障,故障点距离M端3.6 km。经过模量变换后,M、N端获取的线模电压行波分量如图5(a)所示,利用Db6小波对其进行变换,结果如图5(b)所示。 图5 发生单相接地故障时线模电压及其小波变换结果Fig.5 Positive-sequence voltage and its wavelet transform result under single-phase grounding fault 将第1次捕捉到行波信号的时刻作为起始点,则在Ts时间内M、N端的行波时间序列为: 在误差δ内,得到TF={17.5 μs,24.3 μs,29.65 μs},按照第2节分析,TF应该包含2个元素,但现在有3个元素。进一步分析发现,17.5 μs与线路相关,对应于线路l1、l4的反射波时刻,因为线路l1、l4的长度相等,恰好可形成数据对,因此实际计算时应剔除两侧对称线路形成的数据对,剔除的方法是可以预先录入两侧线路的长度,但是由于配电线路结构经常改变,如果经常修改参数必然费时费力,因此可以在构建时间序列时,利用行波行进方向,只保留故障点方向的行波时刻,从而排除线路背端的反射波。所以得到tMF=12.15 μs、tNF=14.825 μs,则LMF=3.643 km、LNF=4.445 km,e=1.09 %。通常设定ε=5 %, 由于满足e<ε,故根据式(6)最终得LMF=3.603 km、LNF=4.397 km。 通过时间数据对计算M、N端在相应时刻的小波变换模极大值,然后根据2.3节的结论可知故障点更靠近N端。 根据式(8),可得到本次测量误差为: 由于单相接地故障以高阻接地故障较为常见,本文改变故障点的位置、过渡电阻阻值,进行多次仿真分析计算,结果如表5所示。 4.1.2 两相接地故障 线路l3在0.004 5 s经200 Ω过渡电阻发生两相接地故障,故障点距离M端2.6 km。M、N端进行模量变换后的线模电压分量及其小波变换结果如图6所示。 从初始时刻到Ts时间范围内,得到M、N端的行波时间序列为: 按照4.1.1节的方法,得TF={17.25 μs,35.45 μs},由于TF中包含2个元素,可以根据现有数据对计算。不剔除两侧近似等长线路形成的数据对(固有数据对),先计算故障位置再与近似等长线路进行比较,如果相差较小,则说明故障距离与近似等长线路的长度接近。按照第2节分析得到tMF=8.625 μs、tNF=17.725 μs,计算得到LMF=2.586 km、LNF=5.314 km,则测距误差为: 误差0.475% 在合理范围,故可认为测距是准确的。改变故障点的位置、过渡电阻阻值(由于两相接地的过渡电阻一般不大,因此10 Ω、50 Ω、100 Ω为例)进行多次仿真,结果如表6所示。 图6 两相接地故障时线模电压及小波变换Fig.6 Positive-sequence voltage and its wavelet transform results of two-phase grounding fault 以4.1.1节中的单相接地故障为例,对单端行波测距法进行分析,设定初始行波时刻为0时刻,则当已知故障线路的长度l时,利用vtx+vty=2l的约束条件,可匹配的数据对为{10 μs,43.4 μs}和{24.1 μs,29.9 μs},均满足条件,此时无法确定哪组数据为有效包含故障点信息的数据,还需要进一步通过其他的方法进行剔除,当存在零模透射线模量的数据对时,数据剔除将更加困难。而采用双端行波测距法时数据剔除较为容易,一般而言,配电网线路两端都是非对称的,这就极大地提高了双端行波测距方法的适用范围。 相间短路、三相短路的行波特征与两相接地短路类似,限于篇幅不再详述。对表5、6中的行波时间序列进行分析发现,大部分时刻均能与非故障线路长度相对应,极个别时刻无法对应是因为零模在故障点透射时形成线模分量,经过3.2节的分析可以发现,零模透射线模分量的时刻并不能够在双端时差序列中形成数据对,故对故障测距的结果不产生影响。 表5 不同过渡电阻和故障位置下的单相接地故障仿真结果Table 5 Simulative results of single-phase grounding fault under different transition resistances and different fault locations 表6 不同过渡电阻和故障位置下的两相接地故障仿真结果Table 6 Simulative results of two-phase grounding fault under different transition resistances and different fault locations 由故障测距结果可知,本文提出的双端行波测距方法在各种故障下的误差都较小,且几乎不受过渡电阻的影响,并且可以有效避免非故障线路反射波和零模透射线模分量的干扰,可靠性高。 本文算法的测距误差主要来自于搜索时间间隔δ的设置,当δ设置为1 μs时,极端情况下,波头时刻识别错误,其时刻误差为0.5 μs,而该时刻实际为2tNF或者2tMF,故实际上测距误差为75 m,这较GPS对时误差1 μs带来的300 m测距误差要小。此外,由于采用的是相对时刻,即同一互感器采集的行波波头时刻相互比较,即使互感器有时延,但相对时间差保持不变,故本文方法不受互感器时延的影响。 本文提出的基于弱同步的配电网行波测距方法,利用故障线路双端行波时间序列的相互关系,有效避免了传统双端测距要求双端严格同步的要求。该方法还具有以下特点: a. 双端行波时间序列采用的是相对时刻,故并不要双端严格同步,只要求双端可以相互通信交换数据,这在配电网中极易实现,并不需要增加额外的特殊设备; b. 利用双端反射系数的不同,由得到数据对时刻的双端行波模值互相比较计算波头来源,与波头极性判断方法相比,更简便; c. 采用双端数据进行独立的冗余处理,需要检测双端行波时差序列的数据对,因此任一端发生扰动或者辨识错误都不会对测距结果产生严重影响,增加了可靠性与适应性。 附录见本刊网络版(http:∥www.epae.cn)。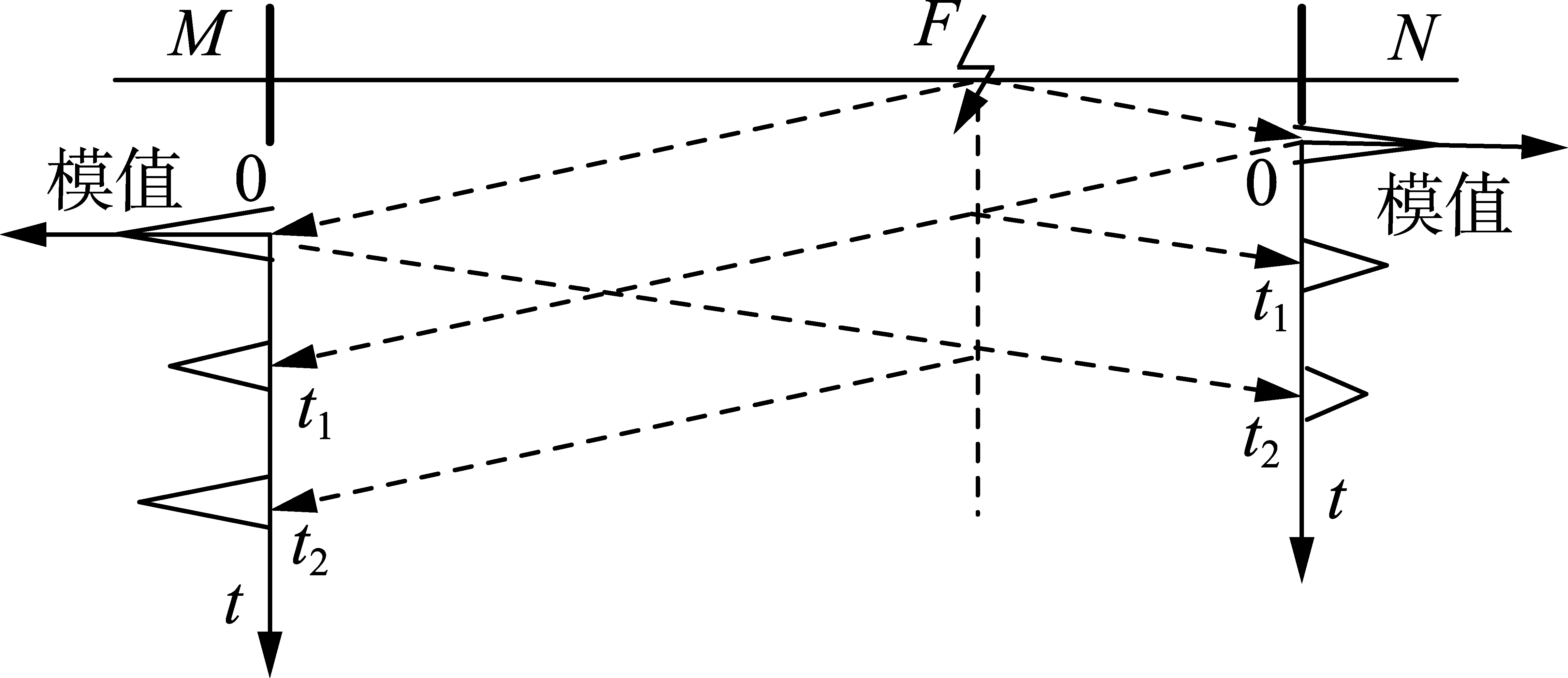
2.3 故障点反射波头与对侧反射波头的识别

2.4 配电网行波测距原理

2.5 与传统双端行波测距法的比较分析
2.6 与传统单端行波测距法的比较分析
3 误差处理与实现方案
3.1 双端时间序列中数据对的搜寻

3.2 实现方案

4 仿真分析

4.1 故障仿真案例


4.2 与单端行波测距法比较分析
4.3 仿真结果分析


5 结论
猜你喜欢
数学物理学报(2022年5期)2022-10-09数学杂志(2022年2期)2022-09-27数学小灵通(1-2年级)(2021年4期)2021-06-09成都信息工程大学学报(2018年1期)2018-05-31小太阳画报(2018年5期)2018-05-14山东工业技术(2016年15期)2016-12-01核科学与工程(2015年2期)2015-09-26湖州师范学院学报(2015年4期)2015-03-11广西科技大学学报(2015年4期)2015-02-27电源技术(2014年9期)2014-02-27