基于EM算法的Marshall-Olkin二元指数分布的参数估计
2018-09-21 05:42袁守成陈相兵
统计与决策 2018年16期
袁守成,张 宾,陈相兵
(1.普洱学院 数学与统计学院,云南 普洱 665000;2.湖北民族学院 教育学院,湖北 恩施 445000;3.四川大学锦江学院,成都 620860)
0 引言
多元指数分布在工业技术上有重要的应用,基于不同的系统可靠性可以导出不同的多元指数分布形式。在众多形式中,Marshall-Olkin多元指数分布[1]是一类唯一保持“无记忆性”特征的分布,其中二元随机变量结构更是被广泛关注。Marshall-Olkin二元指数分布是既不被计数测度控制,又不被Lebesgue测度控制的分布[2],并且与一元指数分布不同,Marshall-Olkin二元指数分布不属于指数族,其概率密度函数具有奇异部分,标准的参数估计方法已不再适用,需要用新的处理方法和手段对其参数进行研究。Arnold(1968)[3]用矩方法对其参数做了研究,并得到了多元指数分布参数的无偏估计;李国安(1993)[4]从二元指数分布的识别性[5]入手,利用极大似然估计(MLE)法讨论了参数的估计问题,并获得该分布参数的一致最小方差无偏估计;进一步,李国安(2015)[6]讨论了指数分布的抽样定理,并给出了四参数Marshall-Olkin二元指数分布参数的一致最小方差无偏估计。本文基于EM算法,通过引入新的潜在变量,克服了直接利用MLE确定参数的困难,给出了Marshall-Olkin二元指数分布的参数的点估计和区间估计,通过数值模拟,发现该方法切实可行。
1 预备知识
设某随机变量U服从指数分布,那么它的密度函数和生存函数可分别表示为:

其中 Ι(0,∞)(u)表示 u 在 (0,∞)上示性函数,λ>0 为尺度参数,记作U~E(λ)。假设三个相互独立的随机变量U1,U2,U3分 别 有 U1~E(λ1) ,U2~E(λ2) ,U3~E(λ3) ,若X1=min(U1,U3),X2=min(U2,U3),则二元随机向量 (X1,X2)服从参数为 λ1,λ2,λ3的Marshall-Olkin二元指数分布,记作(X1,X2)~MOBE(λ1,λ2,λ3)。
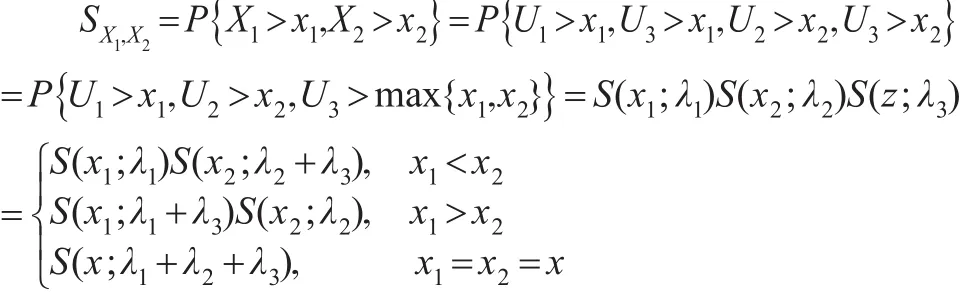
若 (X1,X2)~MOBE(λ1,λ2,λ3),令 z=max{x1,x2} ,则它的生存函数为:
因而,X1和X2的联合概率密度为:
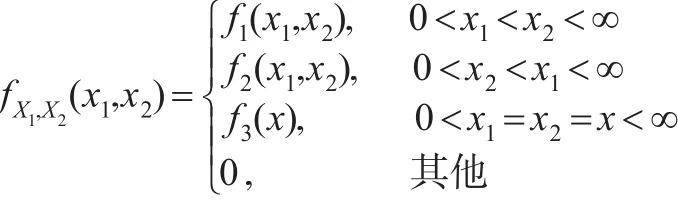
其中,f1(x1,x2)=f(x1;λ1)f(x2;λ2+λ3),f2(x1,x2)=f(x1;λ1+λ3)
2 参数估计的EM算法
设有来自总体 MOBE(λ1,λ2,λ3)样本容量为 n 的观测值 (x11,x21),…,(x1n,x2n),可以做如下标记:I1={i:x1i<x2i},I2={i:x1i>x2i},I3={i:x1i=x2i=x},|I1|=n1,|I2|=n2,|I3|=n3,其中 ||Ii表示集合Ii的元素个数,那么MOBE的对数似然函数可以写为:
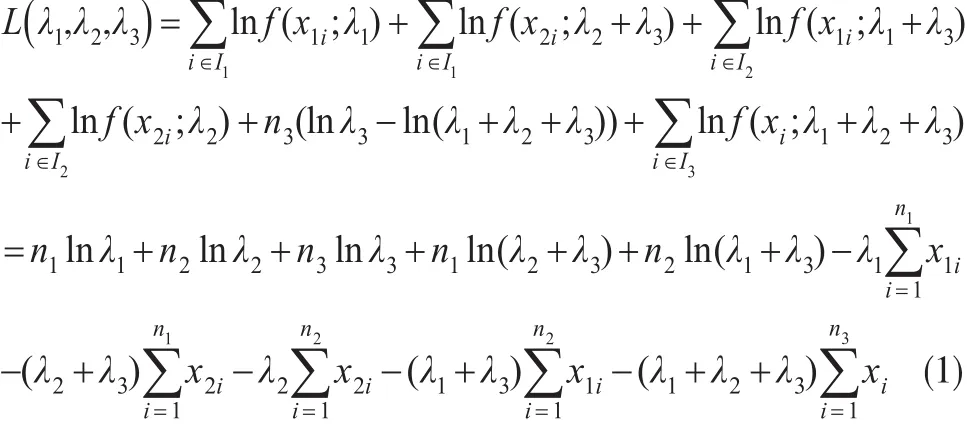
对式(1)分别关于 λ1,λ2,λ3求导,有:

容易发现,参数 λ1,λ2,λ3的 MLE 无法用显式的形式给出来,而必须要通过求解非线性方程组才能得到,这给参数的估计带来不便。下面基于EM算法对参数 λ1,λ2,λ3的MLE给予改进。
考虑到存在着一个与二元随机向量(X1,X2)相联系的潜在二元随机向量 (Δ1,Δ2),其表示为:

可以看到,就算 (X1,X2)已知时,(Δ1,Δ2)也未必知道。若 X1=X2,则有 Δ1=Δ2=0,这是确定的,但是如果X1≠X2,那么 (Δ1,Δ2)就不确定了。例如,当 (x1,x2)∈I1时,(Δ1,Δ2)的可能取值为 (1,0)或 (1,2)。类似地,当 (x1,x2)∈I2时,(Δ1,Δ2)的可能取值为 (0,2)或 (1,2)。
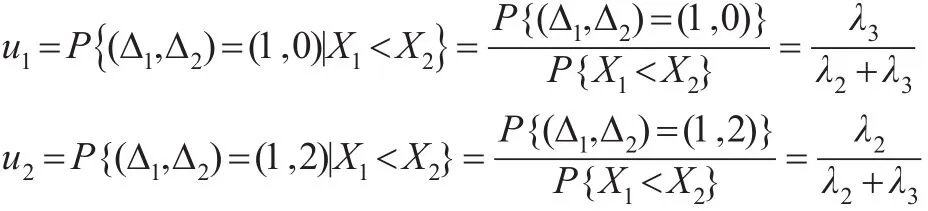
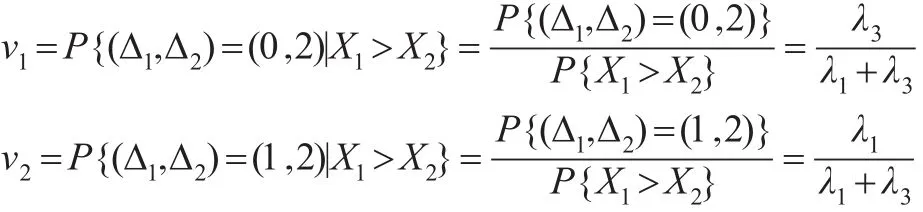
为了实现EM算法,本文采用类似于文献[7,8]中的方法。在“E步”,如果 (X1,X2)∈I3,那么 (Δ1,Δ2)是完全已知的,这时对数似然函数(1)的贡献不变;如果 (X1,X2)∈I1或(X1,X2)∈I2,把它们当做缺失数据处理。当 (x1,x2)∈I1时,(Δ1,Δ2)的可能取值为 (1,0)或 (1,2),认为对数似然函数的贡献是由 (x1,x2,u1)和 (x1,x2,u2)两部分形成,其中 u1和 u2分别为已知 (x1,x2)∈I1时 (Δ1,Δ2)取 (1,0)和 (1,2)的条件概率,而这时的对数似然函数也被称为伪对数似然函数。类似 地 ,当 (x1,x2)∈I2时,(Δ1,Δ2) 的 可 能 取 值 为 (0,2) 或(1,2),认为伪对数似然函数的贡献由 (x1,x2,v1)和 (x1,x2,v2)两部分形成,其中 v1和 v2分别为已知 (x1,x2)∈I2时 (Δ1,Δ2)取(0,2)和(1,2)的条件概率.在“M步”中,对伪对数似然函数关于未知参数求导,从而确定最大值。下面计算条件概率 u1,u2,v1,v2。
由于:


因此:
类似地,计算可得:
从而,伪似然函数可以写为:
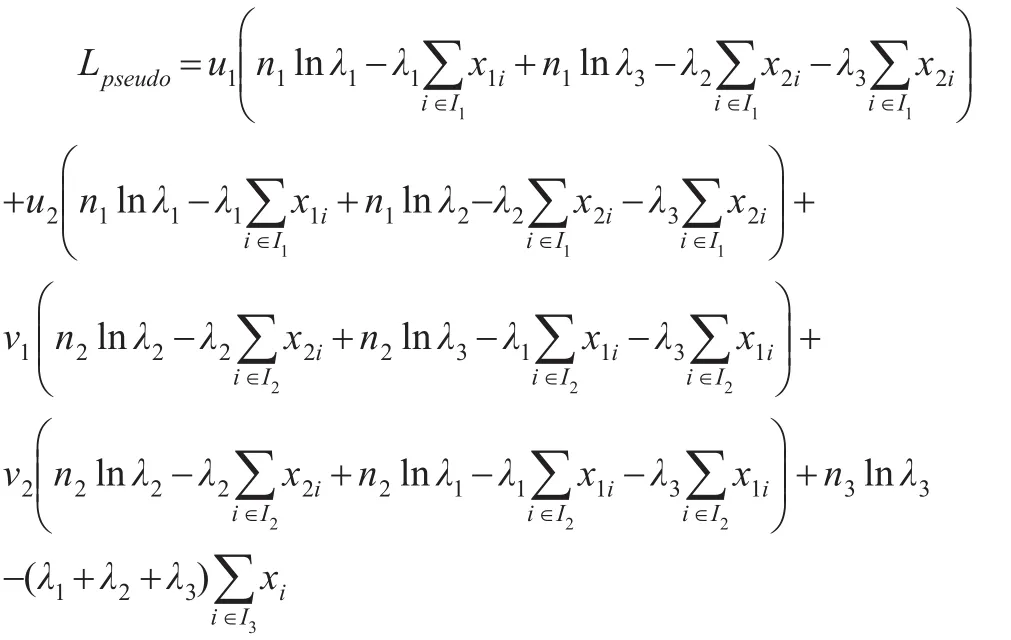
上式简写为:

在“M 步”,对式(3)极大化,分别对 λ1,λ2,λ3求导,可以得到:

下面给出EM算法的具体实施步骤:
(1)选 取 初 值 :给 出 参 数 λ1,λ2,λ3的 初 始 估 计 值
3 区间估计


为表述方便,用V=(vij)1≤i,j≤3表示 Fisher观测信息矩阵 I-1(θ0),则参数 λi,i=1,2,3在置信水平为1-α 下的置信区间为:
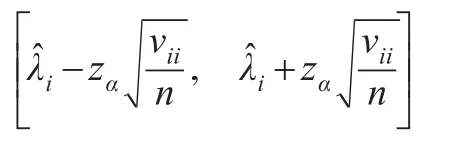
其中,zα为标准正态分布的上侧α分位点。
4 数值模拟
为了验证EM算法对MOBE分布参数估计的理论结果,本文通过数值模拟说明其估计性能。假定U1,U2,U3分布的真实参数为λ1=λ2=λ3=1,分别取样本量n=25,50,100,150,200。由于EM算法是收敛算法,故估计的结果与初始值的取值大小无关,不妨设定初始值,并设定δ=10-5。用以下指标对EM算法的估计性能进行考察,分别为平均估计(记为AE),均方误差(记为MSE)以及置信水平为95%的区间覆盖率(记为CP),模拟次数设定为1000次。

表1 MOBE分布中参数 λ1,λ2,λ3的AE,MSE及CP
通过表1,容易发现当样本量小的时候,λ1,λ2,λ3的点估计和区间估计会有一些小偏差,但是随着样本量的增大,估计越来越接近真实值,均方误差也越来越小,同时区间覆盖率也越来越精确。从而,用EM算法给出的估计是一种相合的估计,使用该方法估计MOBE中参数是一种行之有效的方法。
猜你喜欢
心理学报(2022年10期)2022-10-12
哈尔滨工业大学学报(2022年5期)2022-04-19
内蒙古统计(2021年4期)2021-12-06
北京航空航天大学学报(2020年10期)2020-11-14
青年生活(2019年21期)2019-10-21
中国惯性技术学报(2019年3期)2019-10-15
中国卫生统计(2019年3期)2019-07-10
中国卫生统计(2019年3期)2019-07-10
火力与指挥控制(2017年7期)2017-08-28
科教导刊·电子版(2017年12期)2017-06-19