一种新型混合励磁直线电动机的设计与分析
2018-09-28 06:11诸德宏
微特电机 2018年9期
诸德宏,刘 成
(江苏大学, 镇江 212013)
0 引 言
现阶段轨道交通用的牵引电机主要采用旋转电动机和直线电动机2种。相较于传统的旋转电动机,直线电动机能够产生直接的推力,不需要中间转换机构,优点显著[1]。国内外已投入运行的直线电动机驱动线路中多采用感应直线电动机[2],但感应直线电动机存在着漏磁较多,效率低等缺点。相较于感应直线电动机,永磁直线电动机具有更高的效率和功率因数[3]。但是,由于传统永磁直线电动机的永磁体和电枢绕组分别安装在短动子和长定子上,在需要长定子轨道交通系统中,将导致永磁直线电动机的成本增加且运行维护困难。
近年来,随着新型永磁直线电动机的发展,双凸极永磁电机(以下简称DSPM)[4]、磁通反向永磁电机(以下简称FRPM)[5]和磁通切换永磁电机(以下简称FSPM)[6]引起了人们广泛的关注。这类电机将永磁体和电枢绕组都置于初级短动子上,而次级长定子仅由导磁铁心组成,不仅具有感应直线电动机结构简单的优点,同时还具有永磁直线电动机较高的功率密度。因此,非常适用于城市轨道交通系统这类长定子领域。但是,由于永磁直线电动机的气隙磁场仅由永磁体产生,该类电机的气隙磁场强度恒定不变,无法以高速恒定功率运行,不能在较宽的工作范围内保持高效率。
本文研究了一种具有较宽调速范围的新型混合励磁直线电动机(以下简称HELM),该电动机采用混合励磁方式,模块化结构[7],基于HELM的拓扑结构与工作原理,通过有限元方法分析了其电磁性能,并验证其设计的合理性。
1 HELM拓扑结构
图1为三相HELM的拓扑结构图。其中图1(a)为初级动子的一个模块,该模块由2个T形导磁铁心夹着1块永磁体与隔磁块组成,每个T形导磁铁心上都缠绕有电枢绕组和直流励磁绕组。图1(b)为三相HELM的截面图,A,B,C三相结构相同。其中A相由2个模块组成,2个模块之间由隔磁块进行隔离,A相电枢线圈由A1,A2,A3,A44个线圈串联而成。为使在同一个模块上的2个电枢线圈里匝链的磁通极性相同,缠绕在该模块的2个T形导磁铁心上的电枢线圈需反向串联。同时,由于相邻模块之间永磁体交替充磁,A相2个模块上永磁体的磁化方向相反,因此2个模块上的直流励磁线圈缠绕方向相反,按图1(b)串联连接。
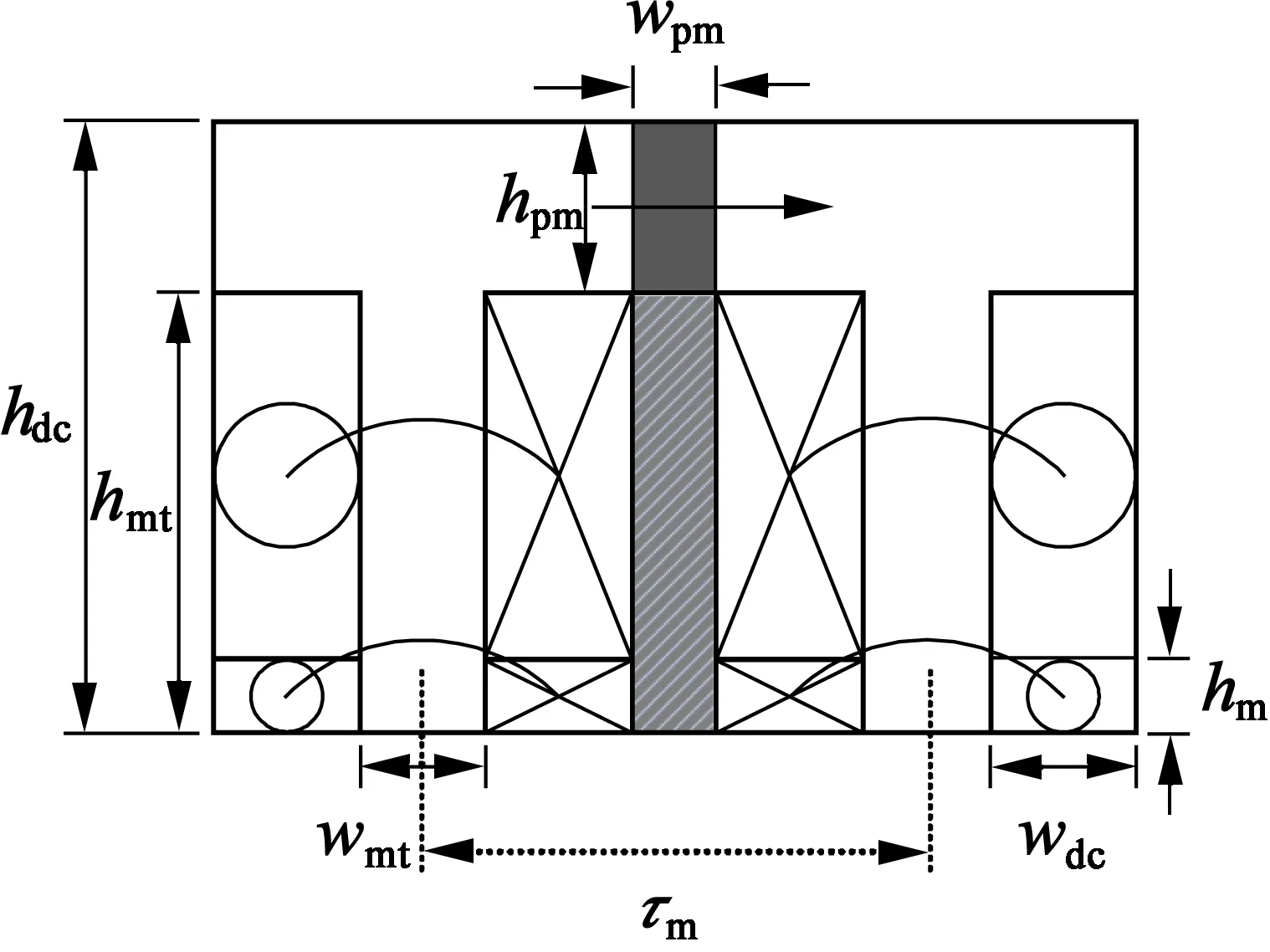
(a)单个模块
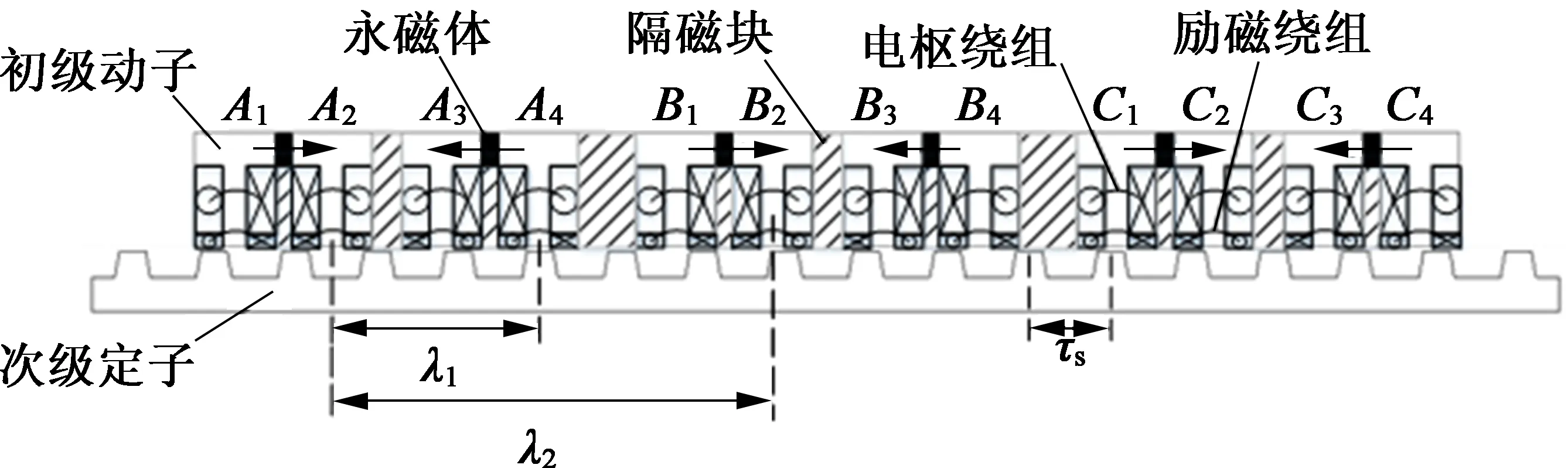
(b)电机横截面
三相HELM采用了模块化的结构。A相2个模块之间相距为λ1=(k±1/2)τs,其中k=2,τs是定子极间距,τs=τm×12/14,τm为动子极间距。相邻两相的2个模块之间的距离为λ2=(j±1/m)τs,j为正整数,m为相数[8]。每相之间通过隔磁块进行隔离,这种结构有利于减小端部效应,同时能够减小高次谐波的影响,提高了反电动势的正弦度。采用混合励磁的方式,电机的气隙磁场由永磁磁场与电励磁磁场共同组成,通过改变直流励磁绕组中电流的大小与方向能够实现对电机主磁场的灵活调节与控制[9]。电机的详细尺寸,如表1所示。
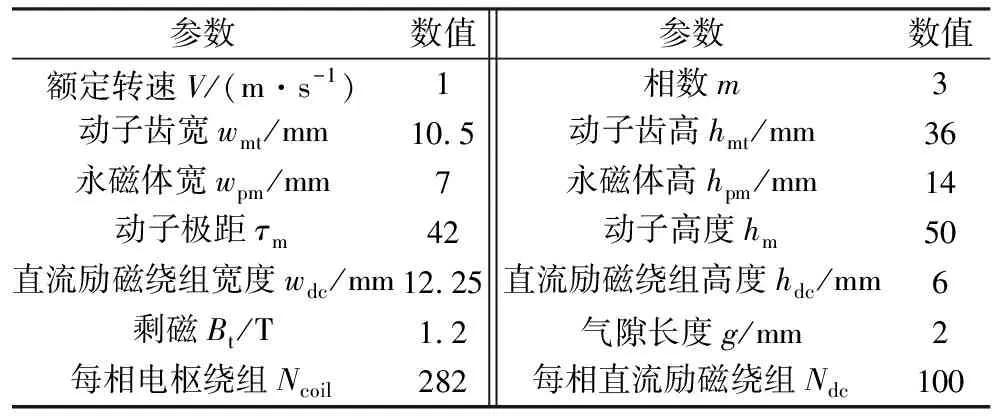
表1 电机结构参数初值
2 运行原理
图1(b)的HELM工作时,永磁体与直流励磁绕组共同产生磁场,A,B,C三相结构相同。以A相为例,在A相中,一个模块上的2个电枢线圈通过反向缠绕,产生大小相等、极性相同的磁链,同相中的另一个模块由于永磁体的磁化方向相反,所以将产生极性相反的磁链。图2为HELM在不同电角度时,A相2个模块的磁场分布情况。图2(a)为磁通负的最大位置,图2(b)为第一平衡位置,图2(c)为磁通正的最大位置,图2(d)为第二平衡位置。同相中的2个模块在空间上存在着180°相位差。因此,缠绕在这2个模块上的线圈具有互补特性[10]。
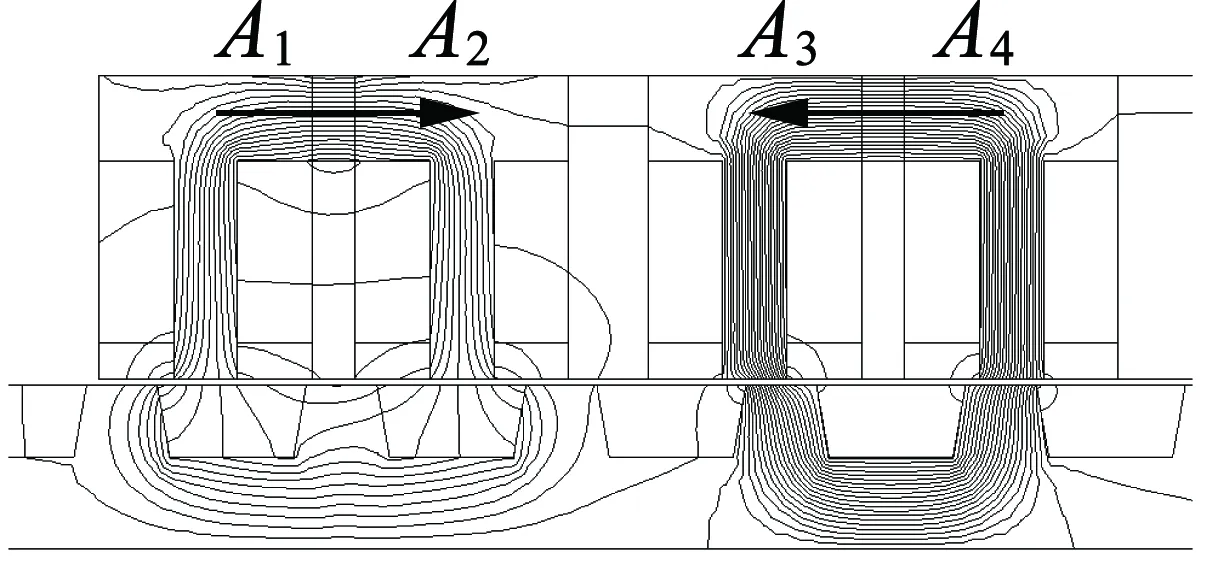
(a) θ=0

(b) θ=90°
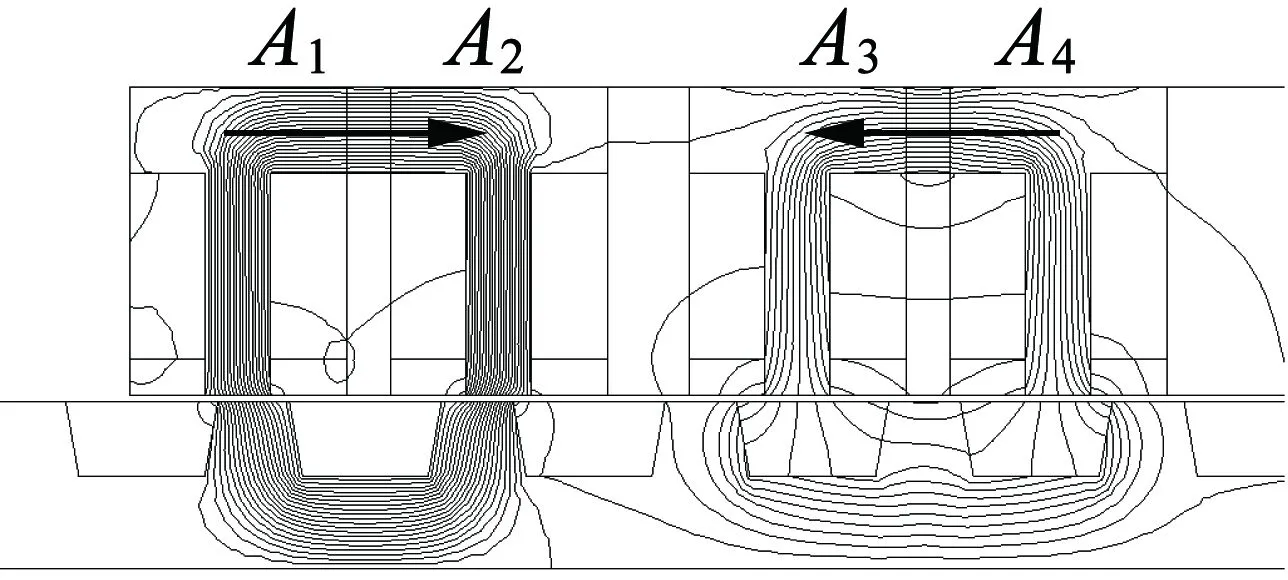
(c) θ=180°

(d) θ=270°
图3展示了HELM磁通调节原理。永磁体与直流励磁绕组共同产生磁场,通过改变直流励磁绕组中电流的大小与方向,从而调节通过电枢绕组的磁通。图3(a)中电励磁与永磁励磁所产生的磁场同向,此时为增磁作用;图3(b)中,改变直流励磁绕组电流后,电励磁与永磁励磁产生的磁场方向相反,此时为弱磁作用。
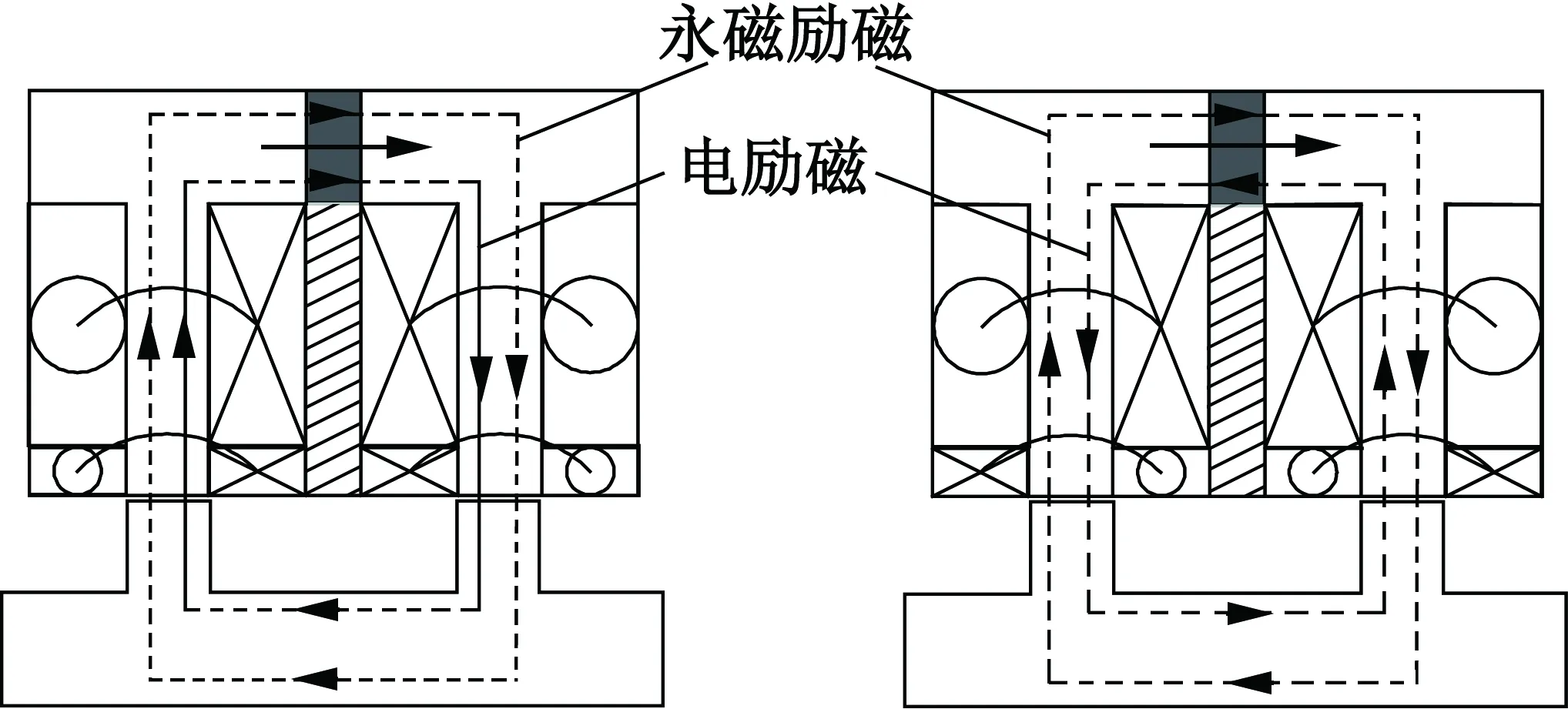
(a) 增磁 (b) 弱磁
图3磁通调节原理
3 电磁性能
3.1 磁场分布
图4分析了HELM在空载情况下的磁场分布。分析过程中,考虑到永磁体端部外的漏磁情况,需要在电机外部增加一个空气区域。由图4可知,在动子齿与定子齿重合度越高的位置,其磁力线分布越密集,同时漏磁通越小。各模块都存在着少量漏磁,但各模块之间干扰较小,电机具有较好的隔磁能力。

图4磁场分布
3.2 空载磁链、反电动势、定位力
本文中的电机励磁磁场由永磁体与直流励磁绕组共同产生。当励磁电流密度If=4A/mm2,电机空载时,图5(a)为电机A相绕组匝链的磁链。由图5(a)可见,线圈A1+A2与线圈A3+A4都为单极性,但是合成后的A相磁链为双极性,且由于A相2个模块上的线圈在空间上相差180°,所以线圈A1+A2与线圈A3+A4具有互补特性,合成后的A相磁链正弦度较高。图5(b)为励磁电流密度If=12A/mm2时的三相磁链。可见绕组磁链高度正弦,且通过增大直流励磁绕组中的电流密度,绕组磁链幅值变大,增磁效果显著。
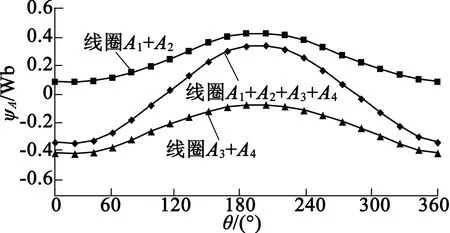
(a) 线圈磁链与相磁链
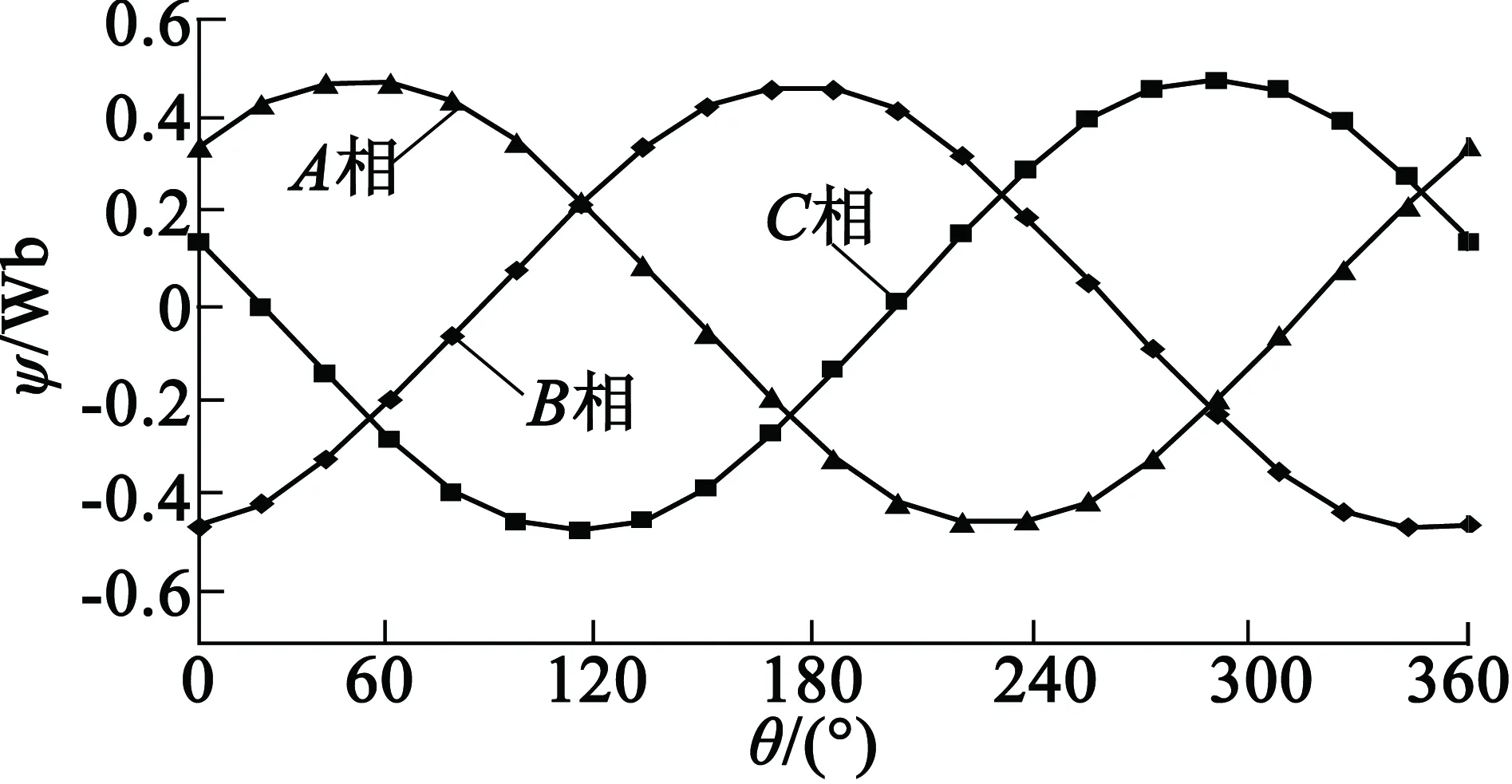
(b) 三相空载磁链
图5空载磁链
图6(a)为A相反电动势,可见A相2个模块中线圈A1+A2里的反电动势波形与线圈A3+A4里的反电动势波形中都含有较大的谐波分量。由于通过线圈A1+A2的反电动势与通过线圈A3+A4的反电动势幅值几乎相同,但高次谐波分量的相位角相反,所以当通过A相2个模块线圈中的反电动势串联叠加后,A相的反电动势波形中的高次谐波分量较少,波形更接近正弦波。B,C相与A相结构相同,其反电动势波形相同。三相反电动势波形如图6(b)所示。
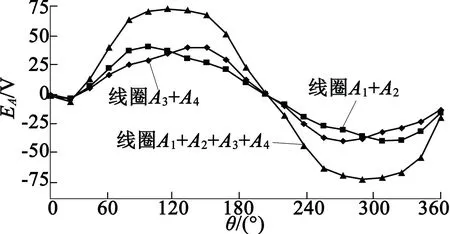
(a) A相反电动势
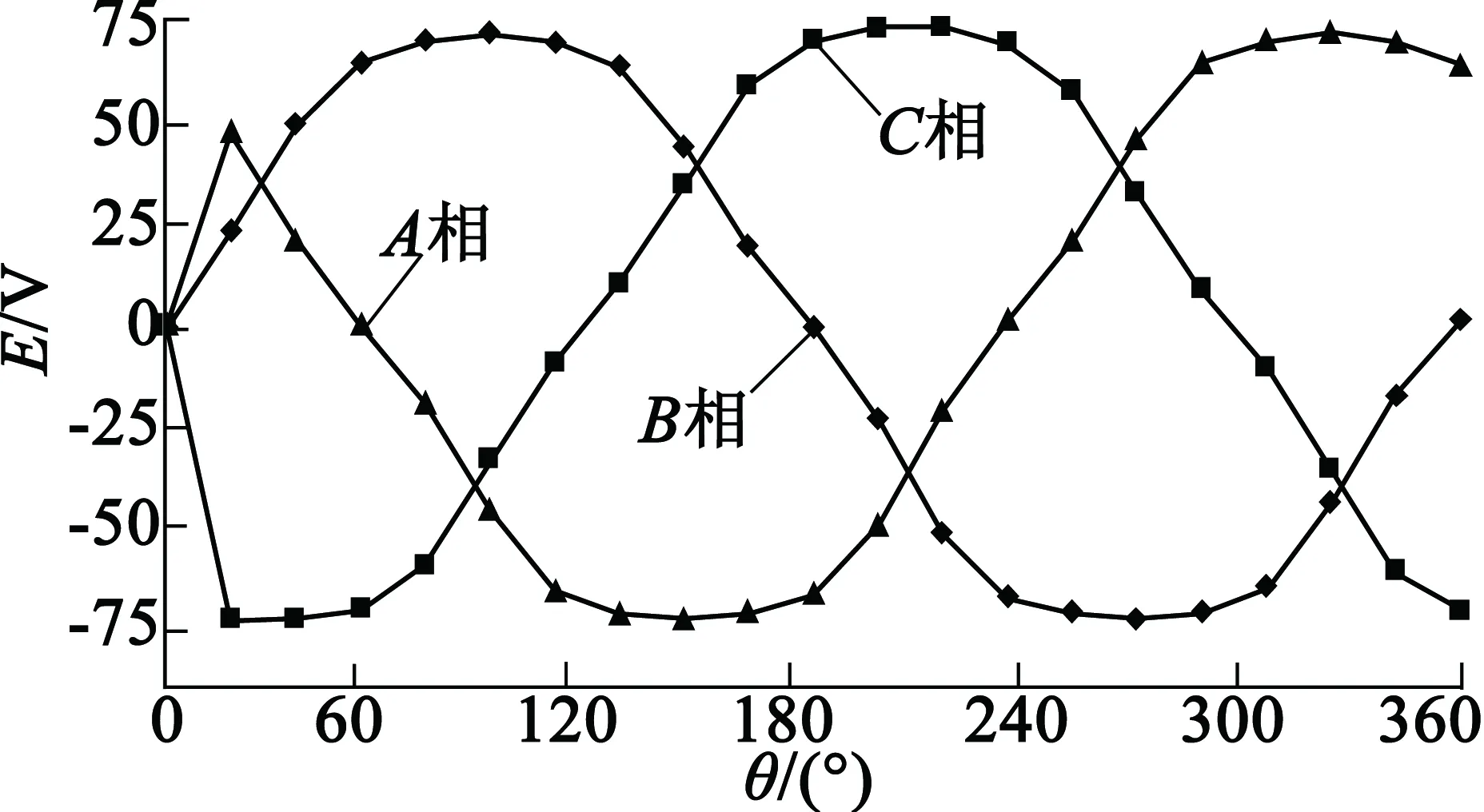
(b) 三相反电动势
图6反电动势
A,B,C三相模块叠加合成后的定位力,如图7所示,因每相模块之间存在着120°的相位差,最终总的定位力被大幅削弱,幅值较小。
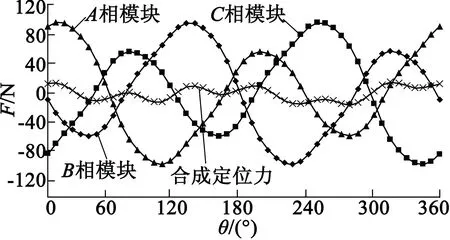
图7定位力
3.3 调磁性能
为研究电机调磁性能,可以定义调磁系数kf:
kf=(ΦHE-ΦPM)/ΦPM×100%
式中:ΦHE是由直流励磁绕组与永磁体共同产生的相磁通;ΦPM是仅由永磁体产生的相磁通。当kf>0时,直流励磁绕组与永磁体所产生的磁场同向,起到增磁作用;当kf<0时,直流励磁绕组与永磁体所产生的磁场反向,起到弱磁作用;当kf=0时,即ΦHE=ΦPM,此时只有永磁体产生磁场,直流励磁绕组中所通电流为0。
图8为在不同直流励磁电流下的A相磁链与A相反电动势,展示了电机的调磁性能。可见A相磁链与反电动势波形都是高度正弦的。当直流励磁电流密度在-12~+12A/mm2变化时,调磁系数kf的范围为-75%~+60%,实现了对电机气隙磁场的调节与控制。采用混合励磁使得电机能够进行弱磁与增磁控制,电机具有较宽调速范围。

(a) A相磁链
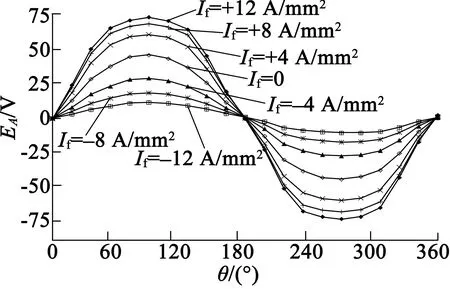
(b) A相反电动势
图8电机调磁性能
4 结 语
本文研究了一种新型模块化HELM,通过有限元软件对其结构、工作原理以及电磁特性进行了分析,得出以下结论:
1)初级动子采用模块化结构,每相由2个磁路互补的模块组成,2个模块中的线圈串联构成一相绕组,有效地减小了相磁链与反电动势中的高次谐波,确保了三相反电动势呈正弦分布。每相之间存在着120°的相位差,使得整个电机合成的定位力较小。同时各模块之间干扰较小,电机具有较强磁隔离能力,容错能力强。
2)采用混合励磁的方式,保证电机具有较高效率的同时,减小了永磁体的用量。通过控制直流励磁绕组中的电流,能够对电机的气隙磁场进行控制与调节,实现对电机弱磁与增磁的控制。
3)电机整体结构简单、紧凑、易于生产加工、便于运行维护,具有次级定子结构简单、反电动势正弦、定位力较小、调速范围宽等特点,适用于轨道交通等长定子应用场合。
猜你喜欢
微电机(2022年8期)2022-10-12
大电机技术(2022年3期)2022-08-06
大电机技术(2022年1期)2022-03-16
计算机仿真(2022年1期)2022-03-01
河北电力技术(2021年2期)2021-07-29
河北电力技术(2021年2期)2021-07-29
微特电机(2020年11期)2020-12-30
郑州大学学报(工学版)(2020年2期)2020-06-16
仪表技术与传感器(2020年5期)2020-06-11
汽车电器(2019年2期)2019-03-22