车床液压自定心中心架联动机构研究
2018-10-13 02:09谢祖强李凌志陈太丽
机械工程师 2018年10期
谢祖强, 李凌志, 陈太丽
(福建船政交通职业学院机械工程系,福州 350007)
0 引 言
对于滚珠丝杆、细长丝杆、发动机曲轴等细长轴类零件,由于长径比大、刚性差,在加工中极易产生振动和弯曲变形,加工质量不易控制。为了提高细长轴类零件的加工精度,各种不同的加工工艺被引入实际加工中[1-2]。其中,采用液压自定心中心架作为辅助支撑提高零件的刚度是一种理想的加工工艺。从1934年开始,国外就有液压自定心中心架的专利和相关研究公开[3-5]。目前,美国AROBOTECH 、德国SCHUNK、ROHM、SMW、印度FAR、瑞典ATLING等厂商生产的液压自定心中心架,以定心精度高、重复定位精度高、操作方便、性能稳定等优点长期占领国际市场。虽然这些产品性能优异,但价格昂贵,供货及维修周期长,在一定程度上影响了使用。
自20世纪90年代以来,我国学者针对液压自定心中心架的研究取得了一些成果。李京鲁[6]对液压自动心中心架的机构原理进行简析,并对中心架的凸轮楔形廓线曲线进行推导;何荣开[7]推导了凸轮滚子中心运动轨迹方程,并提出用与滚子直径相同的盘铣刀加工凸轮廓线;徐旭东等[8]采用解析法在中心架摆杆三点共线这一特定情况下得到凸轮廓线方程;刘步丰等[9]用速度瞬心法解除文献[8]特定约束条件得到凸轮廓线方程及凸轮压力角的表达式;卢学玉等[10]、邱琦等[11]推导了摆杆可隐藏式中心架凸轮廓线方程,讨论了凸轮廓线加工方法;涂庭波[12]对中心架凸轮机构进行研究,提出中心架凸轮机构的设计方法;肖凯[13]借助应用软件得到中心架凸轮曲线加工坐标值;王耀锋[14]针对磨床用的中心架设计理论进行研究,提出一种伺服直驱型中心架的设计方法;赵永强等[15-17]针对磨床用的中心架设计理论进行研究,提出凸轮机构的设计方法。
因此,国内对自定心中心架的研究多围绕凸轮机构的理论设计,而中心架联动机构的研究资料公开相对较少,联动机构是保证中心架稳定、可靠运行的关键。边辉[18]对中心架的联动机构进行定性分析,提出了一种弹簧复位机构和一种联动板复位机构;文献[14]给出联动板式联动机构的原理和设计计算公式,但该公式并非显式方程,应用不便。本文针对中心架的联动机构进行研究,提出一种连杆式联动机构,给出设计计算公式,为中心架联动机构的设计提供一种方案。

图1 中心架联动机构工作原理
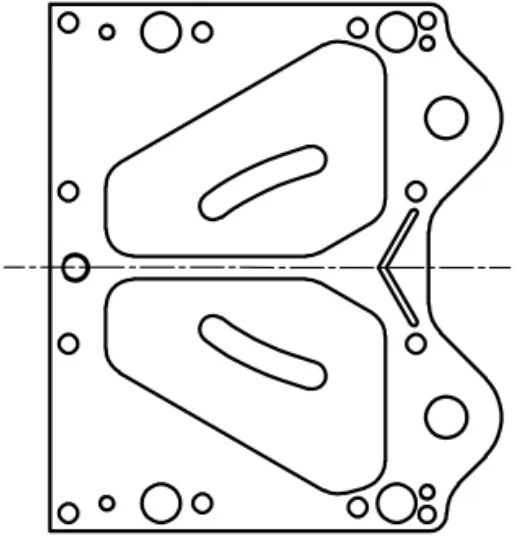
图2 中心架箱体盖板
1 中心架联动机构的工作原理
液压自定心中心架联动机构的原理如图1所示。连杆7一端与固接在平移凸轮5上的连杆旋轴16连接,连杆7绕旋轴16转动,摆杆6的一端设置有导向槽,连杆7的另一端设置连杆轴12和滚轮13,滚轮13与摆杆6上的导向槽配合,连杆7的中部设置连杆轴14与滚轮15,滚轮15与设置在中心架箱体盖板(如图2所示)上的凸轮槽11配合,当平移凸轮5左右平动时带动连杆7运动,通过凸轮槽11和摆杆导槽的约束运动,使摆杆上与平移凸轮配合的滚轮始终与平移凸轮接触,保证中心架平稳运行。
2 联动机构凸轮槽廓形的计算
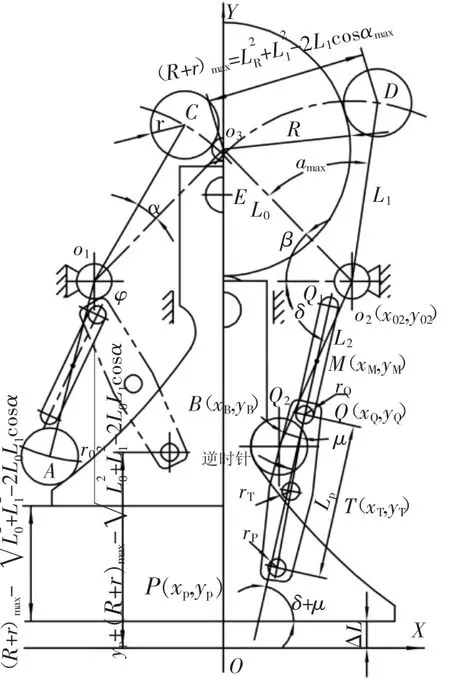
图3 联动机构的参数定义图
2.1 联动机构的参数定义
自定心中心架联动机构的参数定义如图3所示,图中y轴右边为中心架张开最大状态,左边为最小状态。设摆杆摆臂O2D的长度为L1,摆臂O2B的长度为L2,O2D与O2B的夹角φ,摆杆旋轴中心点O2与工件轴心O3的距离为L0,O1O2与O2O3的夹角为β,在任一夹持工况下O2O3与O2D的夹角∠DO2O3为α,当夹持工件半径R最小时记∠DO2O3为αmin,最大时为αmax,则α∈[αmin,αmax];摆杆滚轮C、D、E的半径为r,滚轮A、B的半径r0;平移凸轮上滚子E中心到凸轮底边的距离为L;摆杆O2B上的导槽中心线Q1Q2与O2B的夹角为μ,逆时针方向为正,Q1Q2与O2B的交点为M。连杆PQ长度为lP,连杆一端绕连杆旋轴P转动,P点处旋轴半径为rP,P点距平移凸轮底边的距离为yP0,距y轴为xP0;连杆上Q点及T点处滚轮半径分别为rQ和rT;∠O1O2B记为δ=φα-β。因此,在任一夹持工况下,以P点为圆心,以lP为半径的圆P与Q1Q2交于Q点。为了满足Q点沿摆杆O2B上的导槽运动,回收杆lP上的点T需沿着一定的轨迹运动,求滚子T运动轨迹。
2.2 坐标系的建立
如图3所示,以中心架箱体盖板底边为x轴,以中心架箱体盖板对称中心线为y轴,建直角坐标系xoy,其中y轴也是平移凸轮对称中心线,x轴距离中心架最大张角αmax状态下平移凸轮底边的距离为ΔL。最大张角αmax下O3D的距离为:。因此,在任一夹持工况下,平移凸轮较αmax状态下沿y轴移动的距离为:(R+。根据机构的对称性,以下只推导左边凸轮槽廓线方程。
2.3 求导槽中心线Q1Q2的直线方程
直线Q1Q2与BO2交于M点,根据定比分点公式,M点的坐标为:
B点坐标:

O2点坐标:
整理得:
设直线Q1Q2的方程:

直线Q1Q2与x轴正方向的夹角为δ+μ,则直线Q1Q2的斜率:

其中,δ+μ≠90°。
直线过M点代入整理得:
2.4 求连杆Q点运动轨迹
以P点为圆心,lP为半径的圆与直线Q1Q2交于Q点。P点坐标:

圆P的方程:

则Q点坐标:

整理得:
式中:
可见,lP须满足条件:B2-4AC≥0。
2.5 求连杆T点运动轨迹
求出连杆T点的运动轨迹,即为联动机构凸轮理论廓线方程。
令:

则T点坐标:

2.6 求滚子T处凸轮槽的实际廓线方程
根据包络线法可得凸轮槽的实际廓线方程:

其中上一组“±”号为内包络线,下一组“∓”号为外包络线。对式(14)求导得:
对式(9)、式(12)求导得:

3 设计实例
自定心中心架联动机构参数如表1所示。根据上述数学模型,利用MATLAB软件进行编程计算得到凸轮槽廓线曲线,如图4所示。在CAD软件中取10个等分点利用作图法[19]求凸轮槽廓线曲线:作以P为圆心lP为半径的圆与直线Q1Q2相交于Q点,由P、Q的位置得到连杆T点的位置;将这一系列T点连接成光滑曲线即为箱体盖板凸轮槽理论廓线;过T点作理论廓线的法线,与以T为圆心rT为半径的圆交于(XT,YT)点。光滑连接这一系列(XT,YT)点得到凸轮导槽的实际廓线。由作图法可知,凸轮槽廓线方程满足联动机构要求的运动规律。两种方法求得的凸轮廓线曲线坐标值如表2所示,表中当α=16.580°时,外廓线Y坐标值相对误差最大为0.12%,说明两种方法计算结果吻合很好,验证了推出公式的正确性。
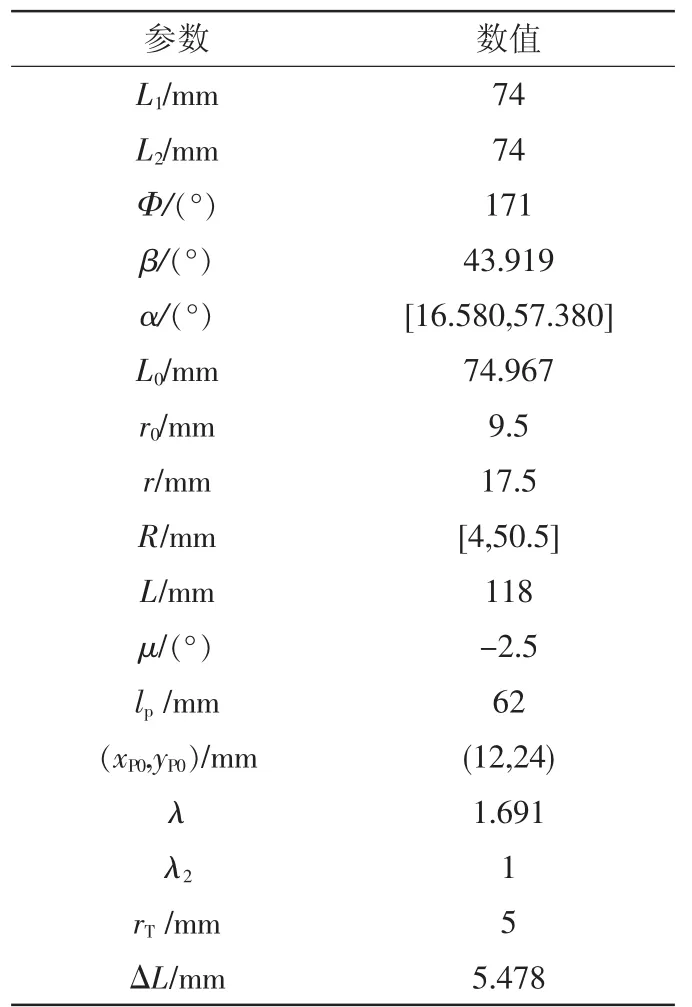
表1 中心架联动机构的参数
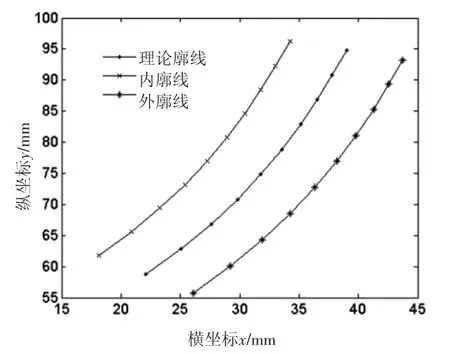
图4 凸轮槽廓线曲线
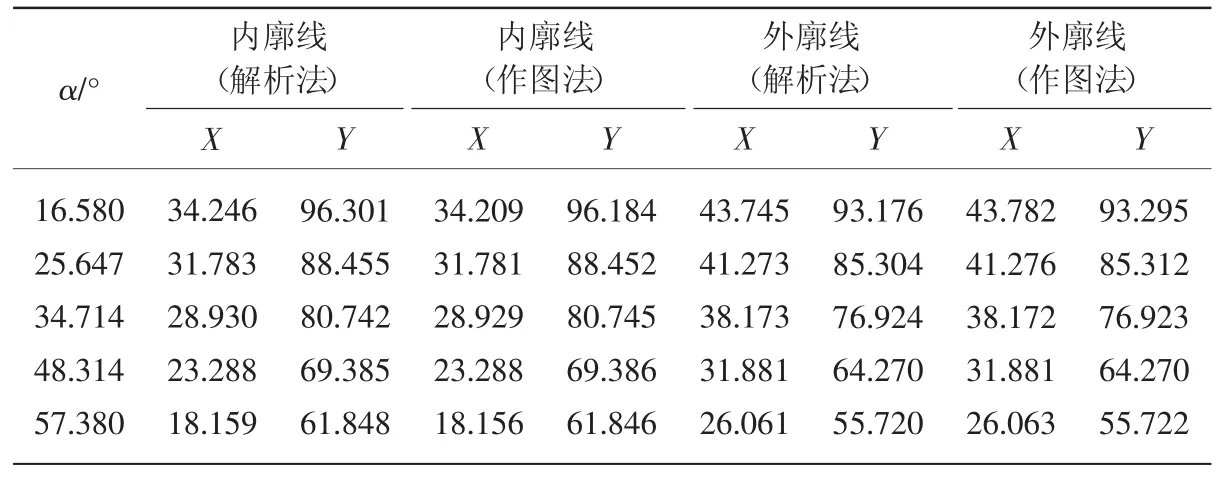
表2 凸轮槽廓线曲线计算结果
4 结 论
本文设计了一种车床液压自定心中心架的联动机构,建立了中心架联动机构的参数化模型,给出了联动机构凸轮槽廓线方程推导过程和设计计算公式。提出一种中心架联动机构设计参数,在MATLAB软件中编程计算,在CAD软件中用作图法求得凸轮槽廓线,并与推出公式计算结果比较,理论计算结果与作图法结果吻合很好,验证了推出公式的正确性。本文为自定心中心架联动机构的设计提供一种方案,并为联动机构参数化设计计算奠定理论基础。
猜你喜欢
港口装卸(2022年3期)2022-07-06
设备管理与维修(2021年23期)2021-02-10
铁道学报(2020年9期)2020-10-09
天文学报(2019年6期)2019-12-10
中学语文(2019年33期)2019-12-03
冰雪运动(2019年2期)2019-09-02
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
制造技术与机床(2018年12期)2018-12-23
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
内蒙古教育·综合版(2017年5期)2017-05-17