带空间协同的多导弹时间协同制导律
2018-10-30 11:53吕腾吕跃勇李传江郭延宁
航空学报 2018年10期
吕腾,吕跃勇,李传江,郭延宁
哈尔滨工业大学 航天学院,哈尔滨 150001
随着反导技术的快速发展,面对敌方目标配备的密集导弹防御系统,单一导弹突防变得愈发困难,而多导弹协同作战借助通信系统将多枚导弹构成一个作战网络,通过信息共享实现配合与协作,共同完成打击任务,这极大提高了导弹的突防概率[1-3]。作为多导弹协同作战的关键技术之一,多导弹的协同制导技术具有重要的实用价值,特别是在时间协同、空间协同和有限时间内协同这3个方面具有重要的研究意义。
时间协同通常指的是多导弹通过弹间通信,相互协调各自相对目标的距离和速度,以使得各枚导弹到目标的打击时刻趋于一致。时间协同可以实现多导弹对目标的饱和攻击,有利于导弹突破敌方密集反导系统,提高导弹作战效能。目前,时间协同制导律的国内外研究成果较多,但基本未同时考虑空间协同问题。传统的带视线角约束的时间协同制导律[4-8]虽然可使多导弹从期望的视线方向同时击中目标,但它的视线角约束项是针对各枚导弹单独进行设计的,无法进行空间协同,且还需要在导弹发射前为各枚导弹设定合理的期望视线角。
空间协同通常指的是多导弹通过弹间通信,相互协调各自到目标的视线,从而使得多导弹从期望的视线相对方向对目标进行打击。现有的大多数协同制导方法是关于时间协同的研究成果,但多导弹的协同攻击策略绝不仅仅局限于时间上的协同,还可以在空间上实现协同以提高攻击效率[1]。空间协同的研究意义在于:① 使弹群能够散开飞行,避免多导弹的相互碰撞;② 可使得多导弹从多个方向进行攻击,从而分散目标近程防御武器系统的火力;③ 可使得多导弹对目标进行协同探测,进而提高探测精度;④ 相比于传统的带视线角约束的制导律,带空间协同的制导律所需的总控制能量更小[9-10]。综上所述,空间协同可以显著增强导弹的突防能力,提高导弹的命中概率和作战效能。目前,国内外针对空间协同的制导律研究成果较少。文献[9-10]针对平面内的目标基于最优控制设计了一种制导律,虽然可以实现空间协同,但其不是在有限时间内实现的,且未考虑时间协同问题。
导弹的打击时刻需要在击中目标前达到一致,相对视线角也需要在击中目标前收敛到期望值。由于有限时间制导律具有响应速度快和鲁棒性强的优点,因而需要设计有限时间内协同的制导律,以保证上述两个性能指标得以实现。传统的时间协同制导律往往只能使得多导弹的打击时刻渐近而非有限时间内达到一致[5-6,11-12],有限时间内的时间协同制导律国内外研究成果比较有限[7-8,13-14],而有限时间内的空间协同制导律研究成果则更少。文献[7]在视线方向基于有限时间理论设计了一种时间协同制导律。文献[8]在视线方向基于二阶多智能体有限时间协同控制理论设计了一种时间协同制导律。文献[13]基于时变比例导引法提出了一种时间协同制导律。文献[14]基于一阶多智能体协同控制理论提出了一种时间协同制导律。文献[7-8,13-14]虽能实现打击时刻有限时间达到一致,但未考虑空间协同问题。
由于同时考虑上述3个方面的协同制导问题具有重要的研究价值,而目前国内外学者的相关研究成果相对较少,受文献[1-22]启发,本文对其进行研究。首先,在视线方向设计了分布式时间协同制导律,可在有限时间内使多导弹打击时刻达到一致,并给出了相应的稳定性证明。然后,在视线法向设计了分布式空间协同制导律,可在有限时间内使多导弹的相对视线角收敛于期望值,并给出了相应的稳定性证明。最后,通过仿真验证了所设计的协同制导律可使多导弹从期望的视线相对方向同时击中目标。
现对本文所提方法的主要创新之处进行概述。首先,与文献[4-14]相比,本文所提方法同时考虑了上述空间协同和有限时间内协同这2个 方面的问题,可以满足新的作战需求。其次,与文献[13,17-18]中的集中式通信方式相比,本文采用的是分布式通信方式,使得每枚导弹只需知道其相邻导弹的信息,从而降低了对弹间通信距离的要求。最后,与文献[4,12]相比,本文采用了无领弹拓扑结构,避免了有领弹拓扑所遇到的单点失效问题,即使弹群中部分导弹被击毁,只要剩余导弹通信拓扑仍然是无向且连通的,则其相对视线角依然可以收敛到期望值,打击时刻依然可以达到一致,因而有效提高了弹群的作战效能。
1 协同制导模型
为了便于研究,本文采用运动学分析方法并基于以下假设[19]:
假设1导弹和目标均视为二维平面内质点。
假设2导弹的导引头和自动驾驶仪动力学与制导回路相比响应足够快。
针对多导弹在平面内从期望的弹目视线相对方向同时打击固定目标问题,给出导弹与目标相对运动几何关系如图1所示,其中Mi和Target分别代表第i枚导弹和目标,ri为Mi与Target之间的相对距离,qi为Mi到Target的视线角,vmi、θmi、amyi和amxi分别为Mi的速度、弹道角、法向加速度和切向加速度,i=1,2,…,n,n为导弹总枚数。
由图1得到Mi与Target的相对运动方程为
(1)
(2)
(3)
(4)
将式(1)和式(2)分别对时间进行求导,并与式(3)和式(4)相结合可得
(5)
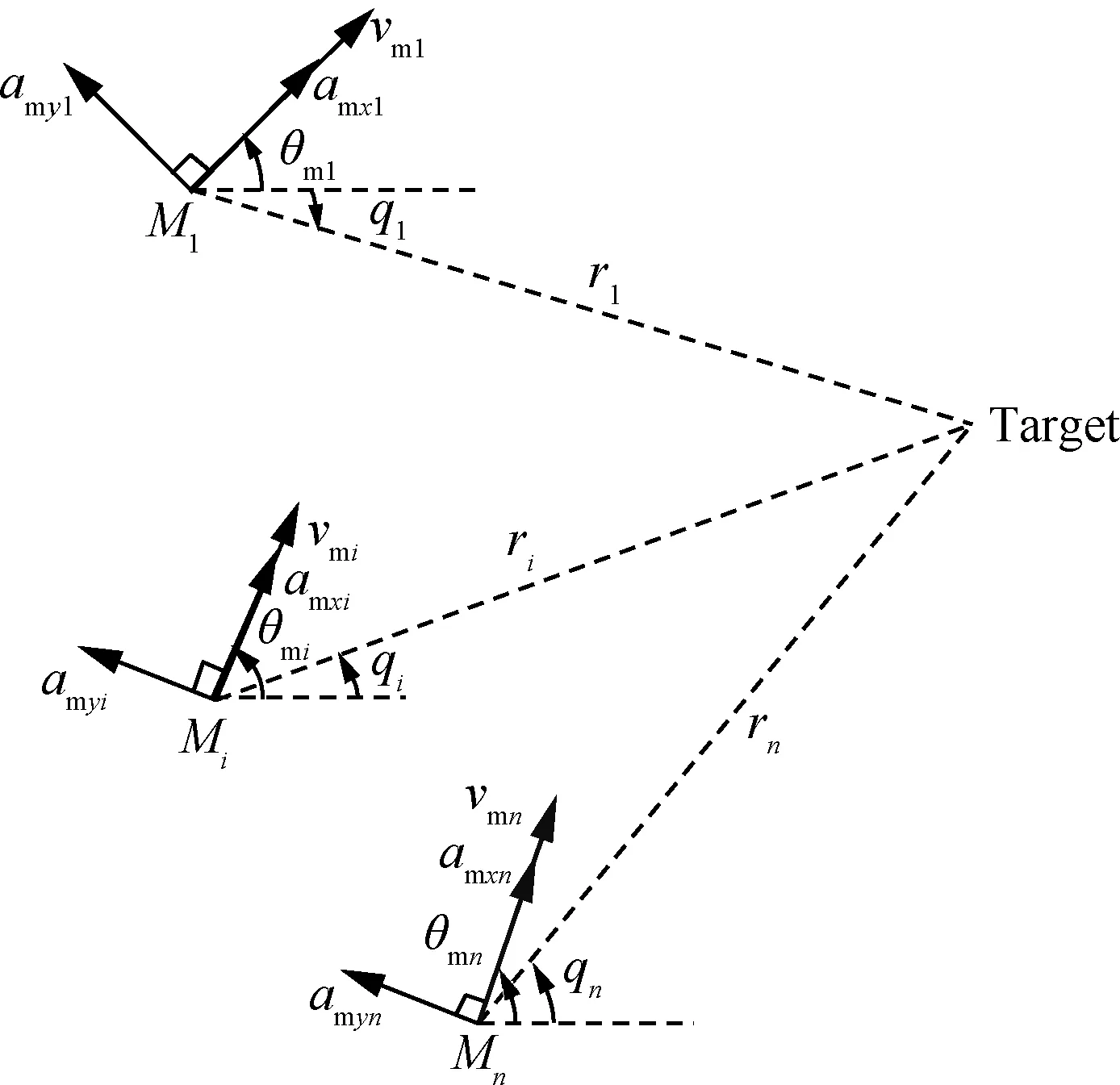
图1 多导弹与目标拦截几何示意图Fig.1 Geometry of multiple missile-target engagement
(6)
式中:uri和uqi分别为Mi加速度在视线方向和视线法向上的分量。
导弹Mi的打击时刻tfi可表示为
tfi=tgoi+t
(7)
式中:tgoi为Mi的剩余飞行时间。
由式(7)可得
tfi-tfj=tgoi-tgoj
(8)
由式(8)可知,如果能控制多导弹的tgoi达到一致,就可使其tfi达到一致,从而实现同时击中目标。tgoi由式(9)估计可得
(9)

(10)
来使得在有限时间内所有导弹的tgoi达到一致,ri逐渐减小,最终实现对目标的饱和攻击。
选择视线角最小的导弹作为M1,定义Mi与M1的弹目视线间的夹角(即相对视线角)为γi,则有
γi=qi-q1
(11)
γi与其期望值γid间的误差为
γie=γi-γid
(12)
式中:γ1d=0,γ2d,γ3d,…,γnd∈(0,π]。为防止导弹间相互碰撞,γid均不能相等。

(13)
来使导弹能以期望的相对视线角击中目标。
将式(11)代入式(12)可得
γie=qi-γid-q1
(14)
由式(13)和式(14)可知,若能控制
(15)
则式(13)即可成立。因此,可令
(16)
由于γ1d=0,由式(16)可得x31=q1,则由式(10)、式(15)和式(16)可知,本文视线方向和视线法向的制导律uri和uqi的设计目标可分别转化为
(17)
(18)
因此,由式(5)~式(6)和式(16)~式(18)可得,带空间协同的多导弹时间协同制导模型为
(19)
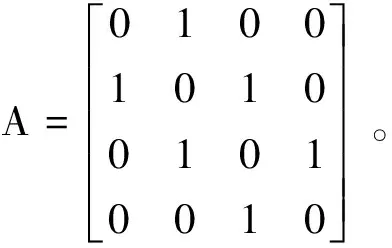
多导弹相互间的通信拓扑关系可由无向图G(A)=(v,ξ,A)来描述,其中v为描述节点组成的集合,ξ代表节点之间的连线,矩阵A=[aij]∈Rn×n为权系数矩阵,若导弹i和导弹j之间能够进行信息交换,则aij=1,否则aij=0,特别的aii=0,i∈{1,2,…,n}。由于G(A)是无向图,因而有aij=aji。如果G(A)中任意两个节点间都存在至少一条通路,则整个图是连通的。定义多导弹间无向图G(A)对应的拉普拉斯矩阵为L=[lij]∈Rn×n,矩阵的元素为
(20)
定义1[20]对n维系统
(21)

fi(εδ1x1,εδ2x2,…,εδnxn)=εκ+δifi(x)
i=1,2,…,n
(22)
如果f(x)是齐次的,则系统(21)称作齐次系统。
引理1[21]设系统(21)是齐次系统且齐次度为κ,函数f(x)是连续的,如果系统(21)是渐近稳定的且κ<0,则系统(21)是有限时间稳定的。


2 协同制导律设计
2.1 视线方向制导律设计
本节针对视线方向制导律uri进行设计。
由式(19)可得Mi视线方向协同制导模型为
(23)
针对式(17)所示制导律设计目标和式(23)所示的制导模型,下面以定理1方式给出视线方向协同制导律及其稳定性证明。
定理1针对系统(23),如果通信拓扑图G(A)无向且连通,则设计如式(24)所示的视线方向分布式协同制导律,可在有限时间内使得系统状态x1i达到一致且逐渐减小到0,并使得x2i达到一致。
(24)
式中:k1r>0,k2r>0,0<αr<1。
证明将式(24)代入式(23)可得
(25)
选取Lyapunov函数如下:
(26)
将式(26)对时间求导可得
(27)
(28)
由于G(A)始终是无向图,因而aij=aji,故由式(25)可知对任意t≥0,都有
(29)
(30)
由式(30)可得
(31)
由式(31)进而可得
(32)
(33)
因此,可定义
(34)
由式(33)~式(34)可得
(35)
由式(34)可知,系统(25)可转化成如下形式
(36)

(37)
(38)
由式(37)和式(38)可得
(39)
可令δi=2,则由式(39)可解得系统齐次度κr=αr-1,因此系统为一个齐次系统,由于0<αr<1,故κr<0。因此由引理1和式(35)可得
(40)
将式(34)代入式(40)可得
(41)
由式(41)可知
(42)
(43)
由式(43)可知,t≥Tr时有
(44)
因而将式(43)代入式(44)可得
(45)

(46)
由式(42)和式(46)可知,定理1中的协同制导律可在有限时间内,使得系统状态x1i达到一致且逐渐减小到0,并使得x2i达到一致,定理1证毕。
注2定理1中uri的第1项为系统非线性补偿项,第2项为剩余飞行时间协同项。第1项可以使得补偿后的系统为一个2阶多智能体系统,进而可采用2阶多智能体协同控制理论对第2项进行设计,第2项用于在有限时间内使得系统状态x1i达到一致且逐渐减小到0,并使得x2i达到一致。
2.2 视线法向制导律设计
协同制导律由其在视线法向分量uqi和视线方向分量uri组成,本节针对视线法向uqi进行设计。
由式(19)可得Mi视线法向制导模型为
(47)
针对式(18)所示制导律设计目标和式(47)所示的制导模型,接下来以定理2的方式给出视线法向制导律及其稳定性证明。
定理2针对系统(47),如果通信拓扑图G(A)无向且连通,则设计如式(48)所示的视线法向分布式协同制导律,可在有限时间内使系统状态x3i达到一致且x4i收敛到0。
(48)
式中:k1q>0,k2q>0,0<αq<1。
证明将式(48)代入式(47)可得
(49)
选取Lyapunov函数如下:
(50)
将式(50)对时间求导可得
(51)
(52)
由式(52)可得
(53)
进而由式(53)可知
(54)
(55)
因此,可定义
(56)
由式(55)和式(56)可得
(57)
由式(57)可知,系统(49)可转化成如下形式
(58)

注3定理2中uqi的第1项用于补偿系统非线性项,第2项为空间协同项。第1项可以使得补偿后的系统为一个2阶多智能体系统,进而可采用2阶多智能体协同控制理论对第2项进行设计,第2项用于在有限时间内使导弹的x3i达到一致且x4i收敛到0。

3 仿真分析
为验证本文所提出的协同制导律的有效性,下面以4枚巡航导弹在地平面内同时攻击一个固定目标的情形为例,分2种工况进行仿真。工况1采用本文所提方法,工况2采用文献[8]中的方法,然后将2种工况仿真结果进行对比,以体现本文方法的优势。各导弹与目标间的初始距离均在13 km以内,均在导弹弹载雷达的最大探测范围之内。仿真步长取为定步长5 ms,固定目标的位置为(8 200,0) m,导弹初始条件如表1所 示。
工况14枚导弹均采用本文所提的协同制导方法进行导引。

表1 4枚导弹初始条件Table 1 Initial conditions of four missiles
视线方向制导律参数取为k1r=5,k2r=5,αr=0.5,视线法向制导律参数取为k1q=2,k2q=3,αq=0.95,i=1,2,3,4。


图2 4枚导弹间的通信拓扑结构Fig.2 Communication topology of four missiles
快速减小并收敛到0,uqi的幅值为30g,由于一般导弹可用过载可达到几十个g以内[12-13],因而其在工程中具有一定的可实现性。
4枚导弹的脱靶量、打击时刻和相对视线角误差由表2给出。可见,它们的脱靶量均在1.420 m以内,打击时刻均达到一致,相对视线角误差均保持在6×10-6(°)范围之内,满足对脱靶量小于2 m,打击时刻最大偏差小于0.1 s,相对视线角误差小于0.1°的要求。
由图3和表2的仿真结果可知,本文方法可以使得多导弹从期望的相对视线方向同时击中目标,且过载在可用过载之内,因而具有一定的有效性。
工况24枚导弹均采用文献[8]中的方法进行导引。
由以上仿真结果可知,本文方法中相关量的收敛时间更短,所需过载更小。另外,由于本文方法飞行时间更长,因而如果按照收敛时间所占总飞行时间的比值进行对比的话,本文算法收敛时间短的优势将更加明显。
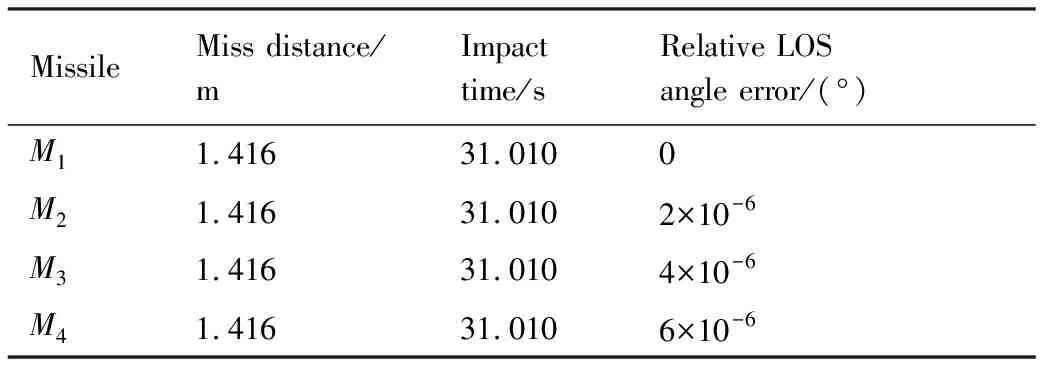
表2 协同制导仿真结果(工况1)




图3 协同制导仿真曲线(工况1)Fig.3 Simulation curves of cooperative guidance (Case 1)


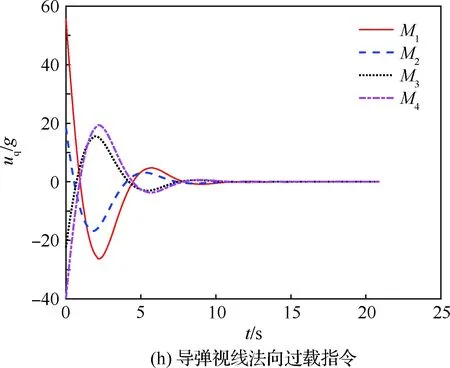
图4 协同制导仿真曲线(工况2)Fig.4 Simulation curves of cooperative guidance (Case 2)
4枚导弹的脱靶量、打击时刻和相对视线角误差由表3给出。对比表3和表2的仿真结果可以看出,虽然表3打击时刻也能达到一致,但此时其最大脱靶量为2.22 m,而在表2中为1.416 m,表2比表3小了0.804 m;表3最大相对视线角误差为6×10-5(°),而在表2中为6×10-6(°),表2是表3中的1/10。

表3 协同制导仿真结果(工况2)
综上所述,相较于文献[8],本文所提方法不仅可使得所有导弹都能击中目标,而且脱靶量更小;不仅可使其打击时刻更快达到一致,且所需视线方向过载更小;不仅可使其相对视线角误差更快收敛到0,且所需视线法向过载更小。因此,本文方法具有一定的优势和有效性。
4 结 论
1) 针对多导弹以期望的相对视线角协同打击固定目标问题,设计了一种带空间协同的时间协同制导律。
2) 该制导律可在有限时间内使所有导弹的打击时刻达到一致且相对视线角收敛到期望值。
未来将结合期望相对视线角可行域分析和视线角测量存在噪声等问题设计协同制导律。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
特区文学·诗(2021年6期)2021-12-22
北京航空航天大学学报(2021年4期)2021-11-24
电脑报(2021年25期)2021-08-27
北京航空航天大学学报(2021年6期)2021-07-20
中国新技术新产品(2020年19期)2020-12-25
青年文学家(2020年22期)2020-08-31
北京理工大学学报(2019年1期)2019-02-22
内蒙古教育·科研版(2018年6期)2018-09-13
当代贵州(2015年19期)2015-06-13