
儿童爬行促通训练机器人在痉挛型双瘫患儿康复中应用的效果①
2018-10-30 01:45杜森杰张跃李红英朱敏陆芬
中国康复理论与实践 2018年10期
杜森杰,张跃,李红英,朱敏,陆芬
南京医科大学附属儿童医院康复医学科,江苏南京市210008
脑瘫是一组持续存在的中枢性运动和姿势发育障碍、活动受限症候群,这种症候群是由于发育中的胎儿或婴幼儿脑部非进行性损伤所致[1]。其中痉挛型双瘫是最常见的一种类型,占50%~60%。国际上认为物理治疗对痉挛型双瘫有效,同时认为对痉挛的临时干预、神经外科干预、神经保护和骨科治疗也非常重要[2]。国内目前采用的物理治疗方案是以神经发育疗法为主的综合康复治疗,主要包括Bobath法、Vojta法,辅以传统运动疗法、上田法等[3]。在此基础上进一步运用“运动学习”理论,使得坐、站、走等粗大运动的促进与改善取得一定的疗效。
爬行作为婴儿期具有里程碑意义的位移活动,其对粗大运动能力和早期心理能力发展的影响近年来备受关注。但是目前针对爬行功能的治疗,主要有Bobath技术和Vojta技术中的徒手爬行训练,以及爬行架等辅助器具训练。这类训练能明显改善脑瘫患儿肢体运动能力及智力发育[4],但也有不足之处,如爬行训练后分离动作有所增加,但兔爬成分部分未完全消失,四爬协调性差[5];爬行需家长配合,家长配合进行康复治疗的时间越长,配合度越高,治疗效果越好[6],如家长配合差,则疗效差;有少部分家长对治疗师治疗要求的依从性较差,未对患儿进行家庭康复训练,故此部分患儿的症状改善或异常姿势消失较慢,疗程较长,治疗费用较高[7]。
针对这种现状,南京医科大学附属儿童医院康复医学科张跃发明了儿童爬行促通训练机器人[8-9],旨在解决康复训练中爬行训练的常见临床问题,提高和改善脑瘫患儿的爬行功能。本研究探讨儿童爬行促通训练机器人对粗大运动功能和认知功能的影响。
1 资料与方法
1.1 一般资料
选取2017年1月至12月来本院就诊的痉挛型双瘫患儿60例,均符合2014年《中国脑性瘫痪康复治疗指南》编写委员会制定的诊断及分型标准[1]。患儿父母或监护人对本研究知情同意并签署知情同意书。
纳入标准:①小儿脑瘫分型为痉挛型双瘫,粗大运动功能分级系统(Gross Motor Function Classification System,GMFCS)为Ⅱ级;②年龄10个月~2岁;③建立手支撑,同时已建立坐位前方平衡及侧方平衡;④未建立四爬能力,粗大运动功能测试量表-88项(Gross Motor Function Measure Scale-88,GMFM-88)中C能区得分为0;⑤肌张力增高,改良Ashworth量表(modifiedAshworth Scale,MAS)均为Ⅰ+级~Ⅳ级。
排除标准:①髋关节脱位或髋关节发育不良;②伴有癫痫且未完全控制;③并发心、肝、肾、脑、造血系统等严重疾病。
剔除和脱落标准:各种原因所致未按研究方案治疗或中途放弃。
本研究项目已通过南京医科大学附属儿童医院医学伦理委员会会议审查(批件号:201701021)。
将符合入选条件的60例患儿按来院先后顺序编号,并采用随机数字表法分为徒手爬行训练组(第Ⅰ组)、爬行架组(第Ⅱ组)和儿童爬行促通训练机器人组(第Ⅲ组),每组20例。研究过程中共有6例患儿脱落,第Ⅰ组1例、第Ⅱ组2例以及第Ⅲ组2例因患儿哭闹剧烈未按研究方案治疗或中途放弃而退出,第Ⅱ组1例因反复呼吸道感染导致治疗无法继续而退出。三组患儿年龄、性别等比较均无显著性差异(P>0.05)。见表1。
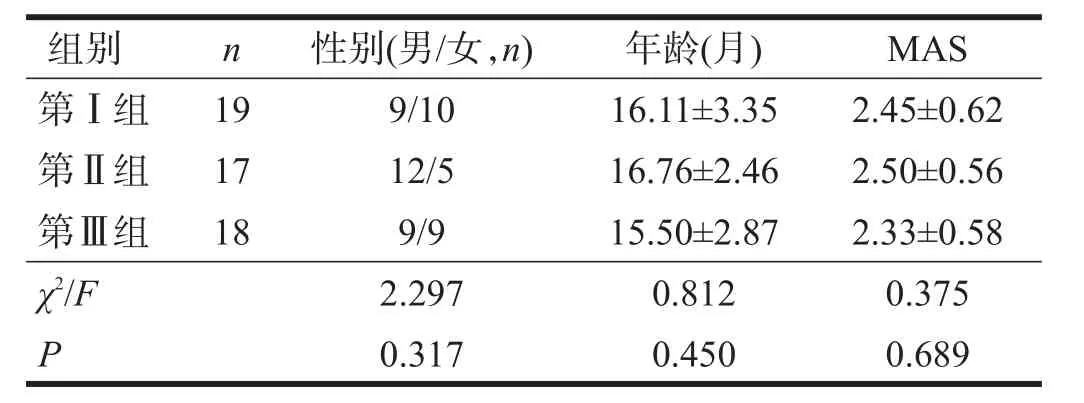
表1 各组一般资料比较
1.2 方法
第Ⅰ组接受常规综合康复治疗,同时行徒手爬行训练,以Bobath手法、Vojta手法中的反射性腹爬(R-K)法进行爬行训练。治疗原则为缓解增高的肌张力,增加正常的关节活动范围,增强核心肌群的肌力,抑制异常的运动模式,促进大运动能力,特别是爬行能力的建立。
第Ⅱ组在常规综合康复治疗基础上,加用C-PXJ型号爬行架(常州钱璟康复医疗器械有限公司)进行爬行训练。在康复治疗师指导下,将患儿俯卧在爬行架上,进行爬行训练。每次10 min,每天1次,每周5 d,共12周。
第Ⅲ组在常规综合康复治疗基础上,加用DS-LF2A型儿童爬行促通训练机器人(南京鼎世医疗器械有限公司)治疗。该仪器已通过国家食品药品监督管理局江苏省医疗器械检验所全项目注册检验,报告编号为:2014ZC94。产品结构组成见图1。将患儿躯干悬吊于训练仪的腹托上,双手及双足固定于特定的手托上,保持身体为四爬位。每次训练10 min,每天1次,每周5 d,共12周。
各组常规综合康复治疗均由相同年资的康复治疗师进行操作。

图1 儿童爬行促通训练机器人
1.3 评价指标
1.3.1 GMFCS
三组于治疗前采用GMFCS进行粗大运动功能分级,纳入本研究的患儿分级均为Ⅱ级。
1.3.2 GMFM-88
三组治疗前后采用GMFM-88进行粗大运动功能评估,记录C能区(爬和跪)得分及A、B、C、D和E能区总分,并将C能区和总分原始分转换为标准分(百分比),各区每项均采用3级评分。完成特定动作记2分,部分完成动作记1分,不能完成动作记0分[10]。
1.3.3 MAS
三组治疗前后采用MAS进行肌张力评定,MAS分级为0级、Ⅰ级、Ⅰ+级、Ⅱ级、Ⅲ级和Ⅳ级,为统计方便(研究数据采用多组肌群的均值),分别量化为0分、1.0分、1.5分、2.0分、3.0分和4.0分。
1.3.4 Gesell发 育 量 表 (Gesell Developmental Scale,GDS)
三组治疗前后采用GDS中文修订版(北京市儿童保健所修订)进行评价,取适应性行为发育商(development quotient,DQ),用以代表认知功能评定[11]。
1.4 质量控制
在前期预实验中,对参与本研究的工作人员进行认真培训,统一调查方法和训练手法;并对实验用儿童爬行促通训练机器人进行信度和效度研究(该论文尚未发表)。结果发现应用组内相关系数(intraclass correlation coefficient,ICC)作为衡量信度的指标,结果均为优秀,重测信度ICC=0.99,测试者组间信度ICC=0.98,ICC≥0.9为优秀[12];但效度研究中儿童爬行促通训练机器人组与爬行架组治疗疗效的Pearson相关系数在不同的GMFCS分级中差异较大,其中GMFCS分级为Ⅱ级的痉挛型脑瘫患儿相关性较高,其Pearson相关系数r=0.76。r≥0.5代表高度相关[12],显著性水平α=0.05。同时,这也是最终确定选择GMFCS分级为Ⅱ级的痉挛型脑瘫患儿为纳入对象的原因。
在治疗中使用同一台儿童爬行促通训练机器人,每次治疗前均对仪器进行校正。两次评估由同一治疗师进行,评估顺序随机安排。
1.5 统计学分析
采用SPSS 24.0软件对数据进行统计分析。计数资料比较采用χ2检验,计量资料进行正态性验证,符合正态分布以ˉ±s)表示。三组间年龄比较采用方差分析。治疗前后GMFM-88、GDS适应性DQ得分、MAS评分的组内计量资料比较采用方差分析;组间比较采用独立样本t检验。显著性水平α=0.05。
2 结果
2.1 GMFM-88 C能区百分比
治疗前,三组GMFM-88中的C能区均未能得分。治疗后,三组GMFM-88中的C能区标准分较治疗前均显著提高(P<0.001);第Ⅱ组和第Ⅲ组C能区标准分均高于第Ⅰ组(P<0.05),第Ⅲ组C能区标准分高于第Ⅱ组(P<0.05)。见表2。
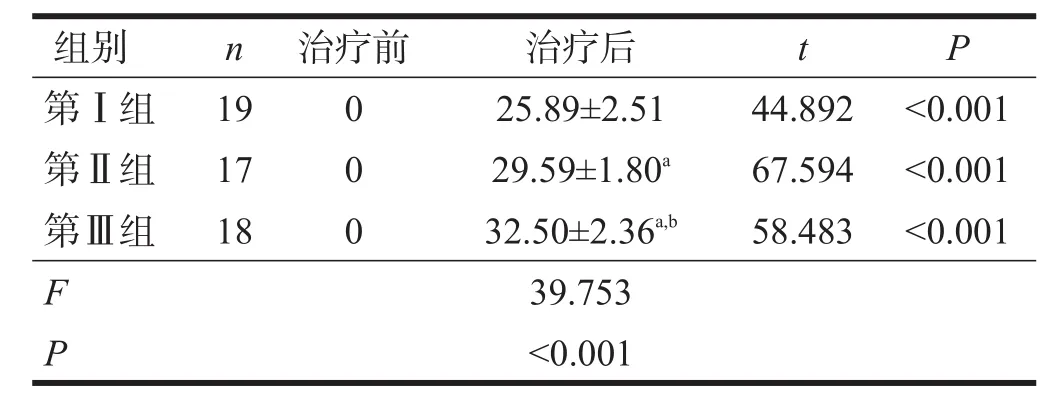
表2 三组治疗前后GMFM-88中的C能区百分比比较(%)
2.2 GMFM-88总分百分比
治疗前,三组GMFM-88总分百分比无显著性差异(P>0.05)。治疗后,三组GMFM-88总分均较治疗前显著提高(P<0.001);第Ⅱ组和第Ⅲ组GMFM-88总分百分比均高于第Ⅰ组(P<0.05),第Ⅲ组高于第Ⅱ组(P<0.05)。见表3。
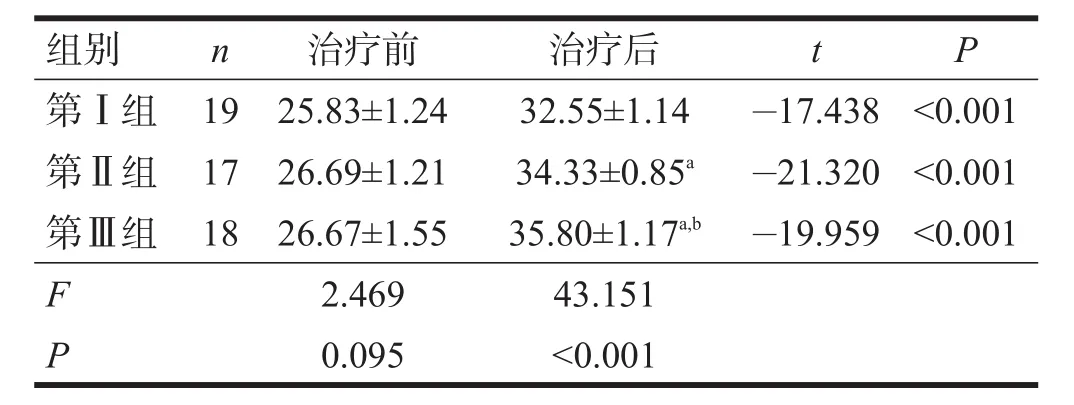
表3 三组治疗前后GMFM-88总分百分比比较(%)
2.3 MAS评分
治疗前,三组MAS评分无显著性差异(P>0.05)。治疗后,三组MAS评分均改善(P<0.05),三组间比较无显著性差异(P>0.05)。见表4。
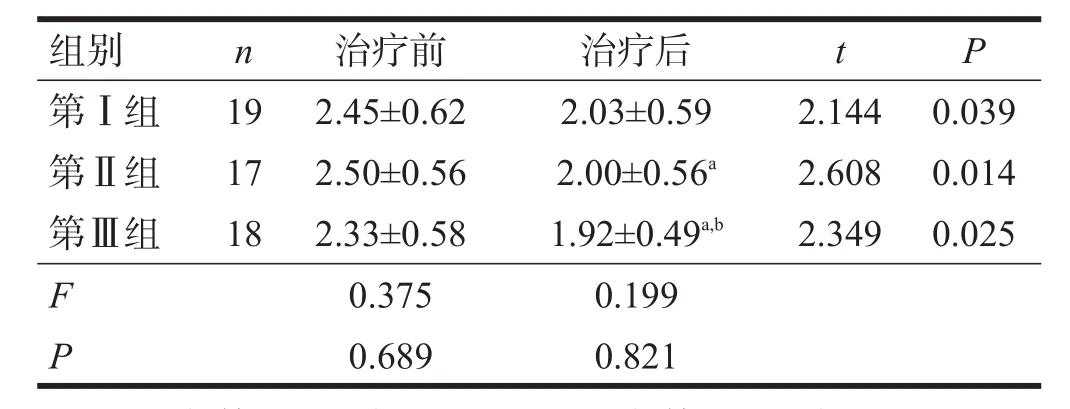
表4 三组患儿治疗前后MAS评分比较
2.4 GDS适应性DQ评分
治疗前,三组的GDS适应性DQ评分无显著性差异(P>0.05)。治疗后,第Ⅰ组患儿GDS适应性DQ评分无明显变化(P>0.05),第Ⅱ组和第Ⅲ组较治疗前均明显提高(P<0.01);第Ⅱ组和第Ⅲ组GDS适应性DQ评分高于第Ⅰ组(P<0.05),第Ⅲ组高于第Ⅱ组(P<0.05)。见表5。
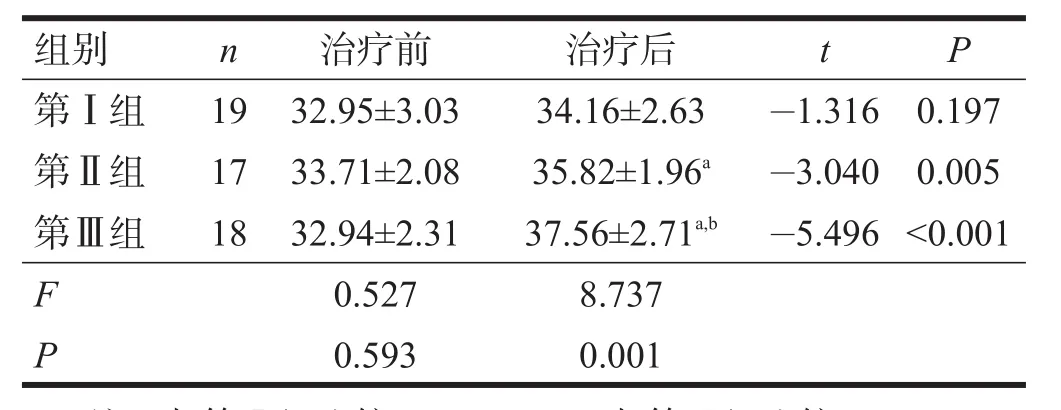
表5 三组治疗前后GDS适应性DQ评分比较
3 讨论
脑瘫是导致儿童残疾的主要疾病,严重影响粗大运动功能(抬头、翻身、坐、爬、站、走)。脑瘫以痉挛型多见,其中痉挛型双瘫占大多数,痉挛型双瘫患儿通常主要表现为双侧下肢肌张力高,股角、胭窝角、足背屈角被动关节活动度小于正常值,全身屈曲模式为主要表现,各大关节屈曲、内收内旋,运动范围减小,抗重力伸展不足(如重心后移、屈髋、屈膝、内收内旋,行走时尖足、剪刀步等)。下肢分离运动受限,导致四爬及独站独走功能障碍,兔跳明显。
爬行功能作为粗大运动发育过程中的一个重要里程碑,现有康复治疗技术能对脑瘫患儿的粗大运动有所改善。通过爬行训练,可促进爬行功能建立,透导患儿正常运动发育和促进正常姿势形成,抑制异常运动姿势和原始反射,改善下肢分离运动及粗大运动功能。本研究主要调查儿童爬行促通训练机器人对痉挛型双瘫患儿的粗大运动及认知功能的影响,并对比新型爬行康复训练器材——儿童爬行促通训练机器人与爬行架和徒手爬行训练三者间的疗效差别。
本研究结果显示,接受儿童爬行促通训练机器人治疗组的患儿,爬行功能和粗大运动功能的改善效果较徒手爬行训练组、爬行架训练组明显。可能与儿童爬行促通训练机器人的原理有关。现阶段,临床常用的针对爬行功能的康复治疗技术有Bobath技术、Vojta手法中的反射性腹爬(R-K)法,以及配合爬行架进行爬行训练。目前的爬行训练能明显改善脑瘫患儿肢体运动能力[4],但也常有令人不如意的地方。①爬行功能的训练需要患儿建立并完善手支撑、躯干稳定等基础。②徒手爬行训练是一种动态练习,主要靠人力,在治疗时需要治疗师和患儿家长两人的交互配合,完成难度大。③脑瘫患儿由于肌张力的异常,所建立的爬行运动多存在异常姿势,正确的爬行必须具备抬头、竖颈、四肢支撑能力、重心转移能力等,若不能有效地抑制异常姿势,可能导致关节变形,并会对下一步站立和步行等直立性抗重力姿势的发育造成阻碍。靠人力进行徒手爬行训练纠正患儿错误的爬行姿势十分困难,且存在训练强度不够等弊端。④爬行训练过程受患儿情绪的影响。⑤脑瘫患儿功能水平的提高可促进家长焦虑状态的改善[13],而爬行训练见效缓慢,会加重患儿家长焦虑状态,影响坚持康复治疗的信心。
儿童爬行促通训练机器人[8]利用的原理是神经系统可塑性原理和运动学习理论。本研究中接受治疗的痉挛型双瘫儿童,其大脑还处于发育阶段,因此治疗重点是利用神经系统可塑性的原理,保证脑功能继续发展。通过重组中枢神经系统功能建立功能性神经通路,实现通过康复治疗改变脑功能[14]。脑组织损伤后,大脑除了在生理上有自然恢复过程(如病灶周围水肿消退、血肿吸收、侧支循环建立、血管再沟通等),其功能的恢复主要依赖大脑的神经系统可塑性,即通过残留部分的功能重组而非损伤组织的再生,来完成已丧失的功能。功能重建依赖于使用模式的反复输入和改良,最终形成新的神经网络或者程序,也称之为使用依赖性功能重建[15]。
运动学习理论正是在这一理论基础上建立起来的。“运动学习”方法是根据对正常人学习操作技能过程的充分了解,通过分析与功能障碍相关的各种异常因素或成分缺失,针对性地设计并引导患者进行运动技能的主动训练,从而促进神经功能重建,获得尽可能接近正常的运动技能。在促进脑功能重建的因素中着重强调功能性活动的反复强化[16]。国外有研究证明,采用限制健侧而强迫使用患侧上肢时,大脑室管膜下成神经细胞出现向病灶周围迁移,同时病灶周围毛细血管增生;而当限制解除后,这种迁移减弱甚至消失[17-18]。强化训练方式包括:①某一个动作的集中0训练;②部分与整体分解训练;③一种技能的多样性训练;④不同技能间的交叉(或干扰)性训练;⑤向实际生活环境转移性训练[16]。
基于上述理论,本研究中所用到的儿童爬行促通训练机器人针对不会爬行、会爬但姿势异常的儿童设计,通过驱动装置,带动脑瘫儿童的四肢交互协调运动,模拟爬行被动运动,可以促进正确爬行的出现及纠正错误的爬行姿势,同时通过不断反复强化的爬行模式的输入,并配合神经生理学疗法所采取的综合康复治疗,建立功能性神经通路,实现康复治疗改变脑功能,以达到改善爬行功能的目的。而爬行作为儿童粗大运动发育的里程碑,是步行以外的代表性的移动运动,也是俯位发育的组成部分,爬行运动功能的建立体现了抗重力发育的过程,为站立位和步行的发育打下基础。进而促进粗大运动能力的改善。根据结果我们不难发现,徒手爬行训练和爬行架,虽能帮助提升爬行功能,但儿童爬行促通训练机器人更具优势。故接受一定时间的反复强化爬行模式的输入,对于患儿运动的改善有疗效。虽然对于爬行训练的重要性见解不一[19],但主流观点仍认为早期爬行可为婴幼儿带来大量益处,本研究结果也证实了这一点。
本研究还显示,三组患儿治疗后肌张力较前有改善,组间比较肌张力无显著性差异。痉挛的机制比较复杂,一般认为是由于中枢神经系统损伤后,高位中枢对脊髓牵张反射的调控障碍或异常,使牵张反射过强或过于敏感所致。目前针对痉挛的治疗方法包括:运动疗法、物理因子治疗、中医治疗、药物治疗及手术治疗等[20]。故考虑本研究中各组患儿肌张力改善的原因并不是徒手爬行训练、爬行架训练或者儿童爬行促通训练机器人治疗,而是常规综合康复治疗的效果。
爬行作为婴儿期具有里程碑意义的位移活动,其对早期认知和心理能力发展的影响近年来备受关注。研究者们从婴儿出生后半年内其爬行动作与心理能力的迅速发展期在时间上同步的现象入手,进一步探讨爬行动作可能引发的功能性结果。爬行一方面可以促进婴儿的身体结构发育和动作发展[21],使其更加自发地探索世界[22-23];另一方面也能提升婴儿的心理和智力水平,如感觉统合、空间认知[24]和记忆检索[25]等能力。可以说,爬行功能的建立和完善对婴幼儿及后期的认知、运动、社交等能力的建立均具有积极的影响。美国费城某研究所的调查表明,爬行可促进婴儿的大脑发育,对手眼协调发育及手、脚、眼协调发育有极大的益处。对于脑瘫患儿,早期进行爬行训练治疗,能更有效地提高患儿的生存质量,并为下一步训练打下良好的基础[26]。
本研究得到相似的结论,儿童爬行促通训练机器人组和爬行架组患儿治疗后GDS适应性能区较治疗前均有明显提升,但儿童爬行促通训练机器人组患儿提升效果优于爬行架患儿,可以认为经儿童爬行促通训练机器人进行爬行训练在认知功能方面治疗效果较站立架及徒手爬行训练更好。
综上所述,本研究结果主要显示了儿童爬行促通
训练机器人治疗对痉挛型双瘫患儿的粗大运动功能及认知功能的改善,较徒手爬行训练和爬行架治疗效果更佳,为儿童爬行促通训练机器人的临床应用提供了证据。这将进一步丰富康复治疗项目种类,且有助于为痉挛型双瘫患儿制定更为合理有效的康复训练方案。但本研究中三组间患儿的肌张力改善无显著差异,提示我们在儿童爬行促通训练机器人治疗的同时,仍不能忽视以降低肌张力为目的的常规综合康复治疗。
猜你喜欢
昆明医科大学学报(2022年3期)2022-04-19
健康体检与管理(2022年2期)2022-04-15
灾害医学与救援(电子版)(2017年3期)2017-02-06
人生十六七(2016年14期)2016-12-01
中国医疗美容(2015年1期)2015-07-12
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
人生十六七(2015年6期)2015-02-28
中国火炬(2013年5期)2013-07-25
