基于图像序列差分正则项的实时心脏磁共振重构
2018-11-01 05:09衡阳徐剑峰陈峰汤敏
中国医学影像学杂志 2018年10期
衡阳,徐剑峰,陈峰,汤敏*
1.南通大学电子信息学院,江苏南通 226007;2.通科微电子学院,江苏南通 226007;3.南通大学-南通智能信息技术联合研究中心,江苏南通 226007;4.南通大学附属医院医学影像科,江苏南通 226007;5.南通大学电气工程学院,江苏南通 226007;
心脏磁共振(cardiac magnetic resonance,CMR)具有多平面成像、多序列成像、无电离辐射、图像质量好、可重复性强等优点,能够全面提供心脏及其邻近结构的信息,可对心脏形态结构、心室功能、心肌活性等生理方面做出准确评价[1-4]。然而,CMR成像时间有时长达1 h以上,制约了其临床应用。随着场强、梯度硬件、脉冲序列等性能上的改进,成像速度有所提高,但是高速切换的梯度场制造成本昂贵,还会刺激受检者的神经与肌肉,引起涡流扰动。因此,从硬件设备角度提高成像速度已基本达到极限,从算法角度入手是目前解决这一瓶颈问题的突破口[5-6]。
压缩感知(compressed sensing,CS)理论是指在某一变换域内具有稀疏表达的信号,以远低于奈奎斯特采样定理标准的方式采集数据,通过与变换基非相干的随机投影采样,运用合适的优化算法高概率精确重构原始信号[7]。由于 CMR成像属于动态 MRI范畴,时空相关度较高,即序列图像上保持不变的背景部分较多,变化的动态部分较少,相邻像素的相似程度较高。因此,可将目前常见的CMR图像重构算法大致分为串行和并行两大类(图1)。串行重构是指在重构算法运行之前必须搜集所有帧的K空间数据,利用整个数据的冗余性重构图像序列,这类算法通常重构精度较高,但是需要调整的参数较多,因此速度较慢,难以达到实时性的要求;并行重构则是假设相邻两帧的图像之间差异很小,通常在密度域或小波域进行,通过稀疏正则化重构并更新图像,这类算法的特点是计算速度较快,但是由于存在误差累积,易导致重构结果不够精确,因此不适用于相对较长的序列图像的重构。
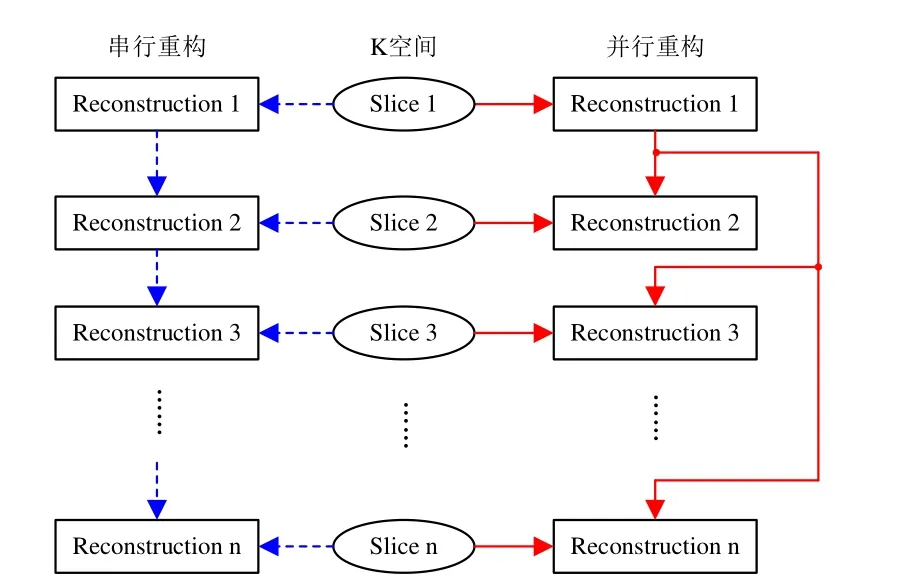
图1 CMR图像重构算法分类及流程。红色实线表示并行重构,蓝色虚线表示串行重构
鉴于上述两类算法的差异,结合串行和并行算法的各自优点,本研究提出基于图像序列差分正则项的实时CMR图像重构算法,力争在重构结果精确性和实时性之间取得较好的平衡。该算法的基本思路是:以第1帧图像作为参考图像,从K空间数据重构出第1帧图像后,利用图像序列差分正则化使得后续帧的重构均以第1帧图像为参考,从而同时利用时间域和空间域的稀疏性。采用改进的NESTA算法对模型进行求解,提高算法的实时性。以峰值信噪比(peak signal to noise ratio,PSNR)、相对误差(relativel2norm error,RLNE)和均方根误差(root mean square error,RMSE)作为定量评价指标,结合人眼视觉感受以及局部区域放大,对比分析本算法与 kt FOCUSS[8]、基于运动补偿的 kt FOCUSS[9]、kt SLR[10]、DTV[11]等主流算法的性能优劣。
1 算法关键技术
1.1 CS-MRI一般模型 CS重构算法的一般形式见公式(1),亦可写作拉格朗日形式,见公式(2)。

一般而言,CS重构算法主要分为贪婪算法、约束优化算法、迫近算法和同伦算法4大类。其中,贪婪算法采用l0范数最小化实现,因其非多项式难解问题,一般只能寻找局部最优解,算法简单快捷,但对于具体应用条件有严格规定。约束优化算法采用l1范数最小化来替代原始的无约束问题,尽管重构效果良好,但是计算量剧增。迫近算法将原始问题转换为相应的迫近算子,计算复杂度低,易于实现,被视为解决非光滑、有约束的大规模数据优化问题的有力工具,但重构精度有待提高。同伦算法通过调整同伦参数,用于l1范数最小化不断迭代寻找最优解。对于算法特点和数据量而言,压缩感知重构算法可以分成一阶和二阶算法两大类,其中一阶算法最多只求一阶导数,计算速度较快,但是不够精确;二阶算法在求解时较为准确,但是计算复杂度很高,难以适应和满足大规模计算的应用场合。
1.2 图像序列差分正则项 TV模型利用相邻像素值差别小的特征对图像进行稀疏表示,在去除噪声和不需要的小尺度细节信息外,保留图像不连续的边缘信息,提高二维图像重构精度,一般模型见公式(3)[12-13]。

其中,下标i和j表示像素x的空间位置。
尽管传统TV在动态MRI重构算法中已取得一定的积极进展[14-16],但是传统TV是基于图像的梯度模稀疏这一假设前提的,对于细节和纹理信息较少的图像具有较好的重构结果;但对于细节和纹理信息丰富的CMR图像而言,传统TV时常导致过度平滑、边缘模糊、细节失真、阶梯效应等缺点。本研究提出图像序列差分(total variation of image sequence,TVIS)正则项的思路,以图像序列的第1帧作为参考图像,其余后续帧的重构均以此作为比较,其定义见公式(4)。

其中,r表示参考图像,即整个图像序列的第 1帧图像;∇x和∇y分别表示沿x和y方向的梯度。比较公式(3)和公式(4),与传统TV方法不同的是,本研究提出的TVIS可以同时利用时间域和空间域的稀疏性,在CMR图像的实时重构中应该能发挥更好的作用。因此,基于TVIS模型的压缩感知重构算法的一般形式可写作公式(5)。

1.3 改进的 NESTA算法 NESTA算法是在 Yuri Nesterov思想的基础上拓展而来的,是属于迫近算法的一阶重构算法,可应用于求解有约束或无约束的优化问题,理论收敛速度快,重构结果精确,鲁棒性好,而且算法所需调节参数少[17-18]。NESTA算法用于求解如下问题:


以下重点研究yk和zk的计算。因为只要计算出它们的值,xk便是两者的加权平均。首先,yk的求解因其目标函数是凸函数,可行域是凸集,因此可采用标准的拉格朗日乘法实现。构造拉格朗日函数是拉格朗日问题的对偶解,则满足 Karush-Kuhn-Tucker(KKT)条件:
根据公式(8)的第4个条件和Sherman-Mprrison-Woodbury求逆公式,可得yk解如公式(9)所示。同理,zk解如公式(10)所示。将公式(9)、(10)代入改进的NESTA算法的计算步骤,便可完成NESTA算法的迭代过程。

综上所述,改进后的NESTA算法迭代步骤主要分成3步:求出的基础上,加权平均得到其核心思路是采用平滑技术,把不光滑的函数平滑化,然后再用高速便捷的迭代算法来求解。改进后的NESTA算法收敛速度可达级,基本逼近一阶算法的理论极限。
1.4 性能评价指标 采用峰值信噪比(peak signal to noise ratio,PSNR)、相对误差(RLNE)、均方根误差(root mean square error,RMSE)3个指标定量分析和评价算法的性能特点,其中PSNR是一种评价图像品质的客观标准,其值越大表示图像失真越小;RLNE用于比较完整采样图像和重构图像的相对l2范数误差,其值越小越好;RMSE说明完整采样图像和重构图像之间样本的离散程度,能够较好地反映重构图像的精密程度,其值越小越好。上述3个指标的计算分别见公式(11)~(13)。

2 结果
本实验在HP工作站Z600上采用MATLAB 2016编程实现,硬件配置为:Intel Xeon CPU E5606@2.13GHz,24 GB内存,64位Windows 7操作系统。使用的完整采样数据来自 kt FOCUSS程序中的full_rad数据,大小为384 384 32× ×。该数据集采用径向采样模式,沿通过K空间中心的径向直线采集数据,具有以下优点:①径向采样数据的每条线含有等量的低频到高频信息,有利于图像的欠采样重构;②径向采样模式对决定图像主要信息的中心数据过采样,因此径向釆样对物体运动没有笛卡尔采样那样敏感,更适用于CMR图像重构。
2.1 对比算法及参数设置 对比算法包括:直接填0的DFFT算法、kt FOCUSS算法[8]、基于运动补偿的kt FOCUSS 算法[9]、kt SLR 算法[10]、DTV 算法[11]。各个算法的相关参数设置见表1。

表1 本实验算法与5种对比算法的相关参数设置
2.2 算法精确性分析 本研究算法中,由于第1帧图像将作为参考图像,后续帧图像的压缩感知重构均以此作为参照,因此第1帧图像的欠采样率不能过低,可选定为40%左右,后续各帧的欠采样率设定为 12%。完整采样图像序列的第 16帧图像见图2A,其中红色正方形方框放大见图2B。本研究算法和上述对比算法同时选取第 16帧及其局部区域放大分别见图3、4,其中A~F依次为直接填0的DFFT算法、kt FOCUSS算法、基于运动补偿的kt FOCUSS算法、kt SLR算法、DTV算法和本研究算法结果图。
将本研究算法和上述对比算法所得结果,沿图2A中黄色虚线展开可得图5。
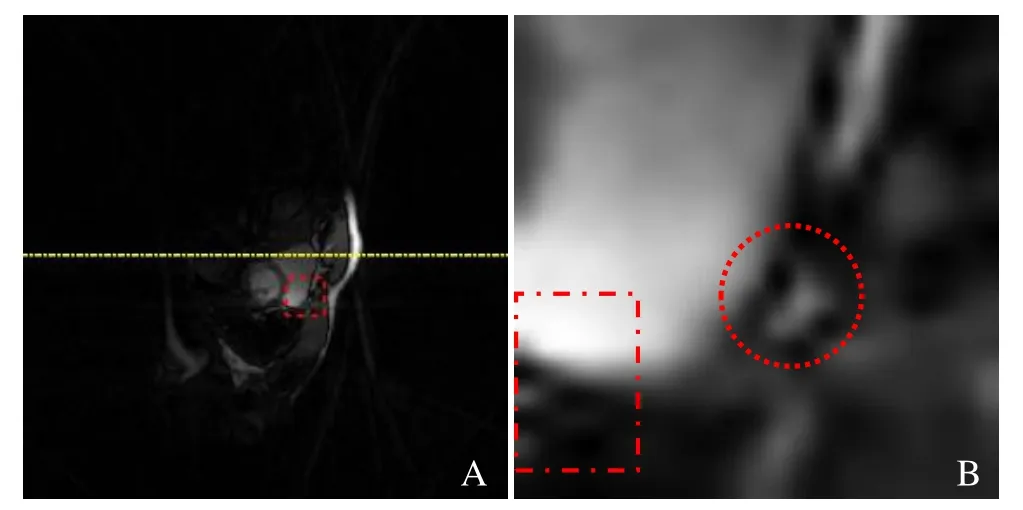
图2 完整采样图像第 16帧及其局部区域放大显示。A为完整采样图像第 16帧,其中红色虚线框放大为B图

图3 本研究算法和其他对比算法第16帧重构结果。A~F依次为直接填0的DFFT算法、kt FOCUSS算法、基于运动补偿的kt FOCUSS算法、kt SLR算法、DTV算法、本研究算法

图4 本研究算法和对比算法第16帧重构结果局部区域放大图。A~F依次为直接填0的DFFT算法、kt FOCUSS算法、基于运动补偿的kt FOCUSS算法、kt SLR算法、DTV算法、本研究算法
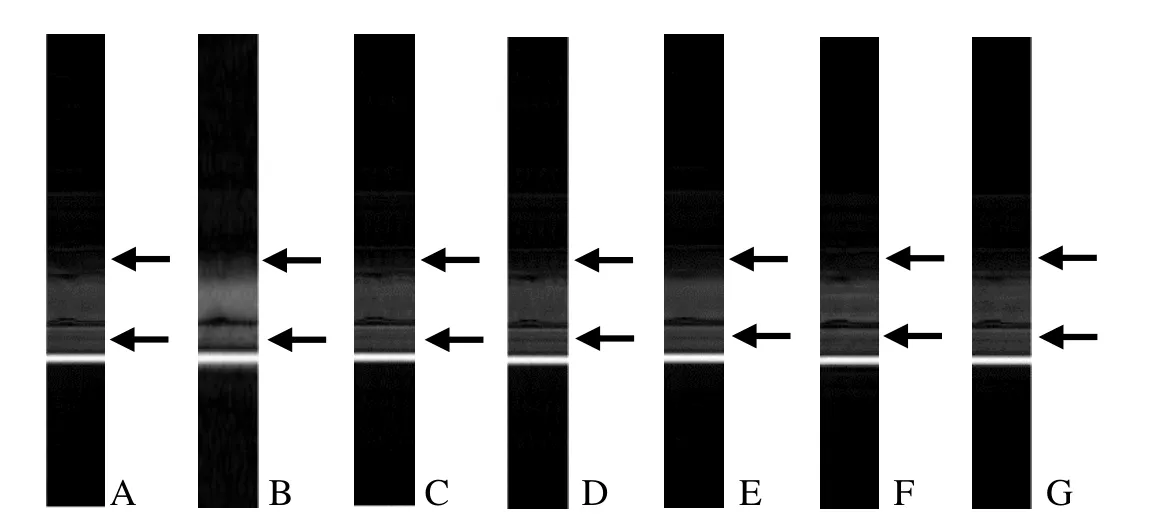
图5 本研究算法和对比算法沿图2黄色虚线展开图。A~G依次为完整采样图像、直接填0的DFFT算法、kt FOCUSS算法、基于运动补偿的kt FOCUSS算法、kt SLR算法、DTV算法、本研究算法。与完整采样图像相比,直接填0的DFFT方法展开图中存在不少伪影;箭所指位置,TV方法的展开图中缺失了上方的灰色条带,kt FOCUSS和基于运动补偿的kt FOCUSS算法中上方的灰色条带不够连续,kt SLR算法中下方箭所指位置的灰色条带明显偏暗
由图2~4可见,本研究算法得到的重构结果人眼视觉效果最佳,尤其在图4中标出的圆形和矩形框中,黑色像素点的位置及大小与图2B中所示的完整采样图像放大结果最接近。相比之下,直接填 0的DFFT方法、kt SLR算法和TV算法放大区域明显缺少黑色像素点聚集,而kt FOCUSS和基于运动补偿的 kt FOCUSS算法圆形框中的明亮像素明显缺失。本研究算法所得重构图像在人眼视觉系统的定性评价上性能最优,最接近完整采样图像。
从定量指标上进行分析,上述算法32帧图像的性能指标对比见图6,性能指标的平均值见表2。由于直接填0的DFFT方法效果最差,PSNR最低,因此在RLNE和RMSE的对比图上未参与显示,重点比较其他几种算法的RLNE和RMSE指标。本研究算法几乎在各帧图像重构中均能得到最高的PSNR值和最小的RMSE值,32帧的性能指标平均值也是如此;仅RLNE指标,是基于运动补偿的kt FOCUSS算法性能最优,可能因为在运动补偿环节对重构图像进行了必要的修正所致。因此,从性能指标定量分析来看,本研究算法总体性能仍为最佳(图6、表2)。

图6 本研究算法和对比算法的性能指标对比。A为PSNR指标,B为RLNE指标,C为RMSE指标

表2 本研究算法和对比算法的性能指标平均值
2.3 首帧图像欠采样率对算法性能的影响 如前所述,第 1帧图像作为整个图像序列的参考图像,其重构精度将显著影响后续帧的重构精度,因此有必要考查首帧图像欠采样率对整个算法性能的影响。首先,固定第1帧图像的欠采样率为40%,后续帧的欠采样率分别设置为10%、15%、20%、25%、40%,算法性能指标见图7。然后,将第1帧图像的欠采样率分别设置为100%、75%、50%、25%、15%,而将后续帧的欠采样率固定为 25%,算法的性能指标见图8。

图7 首帧图像欠采样率对算法性能的影响。固定第1帧图像欠采样率为40%,后续帧欠采样率可调。A为PSNR指标,B为RLNE指标,C为RMSE指标

图8 首帧图像欠采样率对算法性能的影响。第1帧图像欠采样率可调,后续帧欠采样率固定为25%。A为PSNR指标,B为RLNE指标,C为RMSE指标
由图7可见,首帧图像欠采样率固定为40%,即使后续帧欠采样率仅10%时,本研究算法依然能取得较好的性能指标,其PSNR均值为44.6268 dB,RLNE均值0.0374,RMSE均值0.0059,完全能够满足临床辅助诊疗的需要。随着后续帧欠采样率上升,各项性能指标逐步趋优,当后续帧欠采样率也达40%时,性能指标最高可达PSNR均值为49.3388 dB,RLNE均值0.0185,RMSE均值0.0034。由图8可见,当固定后续帧欠采样率为25%时,首帧图像的欠采样率对图像重构质量的影响不是特别明显。若首帧图像完整采样,则此时的性能指标最高可达 PSNR均值为 49.1890 dB,RLNE均值0.0149,RMSE均值0.0035;若首帧图像欠采样率仅为15%,此时的性能指标也能达到PSNR均值为45.9503 dB,RLNE均值0.0303,RMSE均值0.0051。综上所述,为使本研究算法的精确度能够达到临床辅助诊疗的作用,可以将首帧图像欠采样率设置为25%~40%,后续帧的欠采样率设置为15%~20%,这样即能确保RLNE和RMSE分别小于0.05和0.005。2.4 算法实时性分析 本研究算法和对比算法的运行时间结果见表2。相比而言,尽管直接填0的DFFT算法运行时间短到可以忽略不计,但由于其性能太差,无法应用于医学图像临床辅助诊疗,因此排除在外。其余算法中,kt SLR的运行时间达2977 s,约需50 min;kt FOCUSS算法运行222 s,基本满足实时性的要求;基于运动补偿的kt FOCUSS算法因运动补偿环节,其运行时间达882 s,即15 min左右;本研究算法运行时间仅36 s,平均每帧图像重构仅需1.125 s,完全满足医学图像重构实时性的要求。
3 讨论
本研究将压缩感知理论引入 CMR,提出基于图像序列差分正则项的实时CMR图像重构算法,在取得精确重构结果的同时,提高了程序运行的实时性。
在精确性方面,首帧图像欠采样率40%,后续各帧欠采样率12%时,相比其他5种对比算法,本研究算法获得最佳的性能评价指标,同时局部区域放大后黑色像素点的位置和大小最接近完整采样图像,即人眼视觉系统的主观感受最佳。
首帧图像欠采样率对算法性能影响不大。一般来说,首帧图像欠采样率为 25%~40%,后续帧欠采样率为 15%~20%,即能取得令人满意的重构结果,完全能够满足临床辅助诊断的需求。
实时性方面,对于实验使用的32帧CMR图像而言,本研究算法重构仅需36 s,比DTV算法运行时间略短,与kt FOCUSS算法、基于运动补偿的kt FOCUSS算法以及kt SLR算法相比,本研究算法的运行时间仅为其1/10甚至1/100。因此,本研究算法可以在获得精确重构结果的同时满足实时性的要求,在临床上具有广阔的应用前景。
当然,本研究算法尚有进一步提升的空间。近年来,基于低秩稀疏分解的CS-MRI图像重构研究方兴未艾。有学者首次将低秩稀疏分解模型应用于MRI图像重构,初步应用于心脏灌注、心脏电影、血管成像、胸腹部 MRI等[19]。有学者利用鲁棒主成分分析提取动态 MRI中的动态组织部分,提出基于稀疏和低秩先验分离的重构算法[20]。有人提出基于部分可分离模型和压缩感知相结合的Stepped-Sparse PS算法[21]。还有研究者初步提出多尺度和多维低秩矩阵分解,并应用于人脸图像、监控视频、动态 MRI等的多尺度建模和协同滤波[22-23]。
今后的研究方向包括:①将本研究算法与基于低秩稀疏分解算法进行性能对比和分析;②将本研究算法应用于更多CMR序列的快速重构,检验算法的普适性;③将本研究算法应用于儿童心肌病、复杂先天性心脏病、心脏二尖瓣病变图像重构中,并与临床医师的主观判断相对照,从而检验算法在临床疾病辅助诊疗中的实际作用。
综上所述,压缩感知理论引入 CMR,可以加快成像速度,提高成像质量,提高检查舒适度和检查质量,促进循环系统疾病诊疗新技术的发展。本研究结合串行和并行算法的各自优点,提出基于图像序列差分正则项的实时CMR图像重构算法,基本思路是以第1帧图像作为参考图像,从K空间数据重构出第1帧图像,此后利用图像序列差分正则化使得后续帧的重构均以第1帧图像为参考,从而同时利用时间域和空间域的稀疏性。采用改进的NESTA算法对模型进行求解,提高算法的实时性。以PSNR、RLNE和RMSE作为定量评价指标,结合人眼视觉感受、局部区域放大和沿时间轴展开等定性分析方法,充分说明本研究算法较kt FOCUSS、基于运动补偿的kt FOCUSS、kt SLR、DTV等主流算法的性能优势,能在获取较为精确的重构结果的同时,很好地满足医学图像处理实时性的要求。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
摄影世界(2022年1期)2022-01-21
石油沥青(2021年1期)2021-04-13
中国生殖健康(2020年7期)2020-12-10
空间科学学报(2020年4期)2020-04-22
商周刊(2017年6期)2017-08-22
北京航空航天大学学报(2017年12期)2017-04-23
考试周刊(2017年7期)2017-02-06
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14