
一种导轨直线度与平行度测量系统的研究与应用
2018-11-13 10:06,,,
现代机械 2018年5期
,,,
(大连理工大学机械工程学院,辽宁大连116000)
0 引言
直线度与平行度的测量是几何计量领域里最基本也是最重要的项目之一,同时也是机械制造业中的一个非常重要的内容[1]。导轨直线度与平行度是影响机床精度的重要因素,对导轨直线度与平行度的测量和调整是提升机床精度的重要方法之一。针对直线度的测量国内外学者提出了众多直线度测量与评定方法[2-5],并进行了深入研究。直线度的测量方法主要包括光轴法,视觉检测法,莫尔条纹检测法等光学测量法和传统的接触式扫描法[6]等。光学测量法需要光电自准直仪和激光干涉仪等昂贵的测量仪器,测量系统结构复杂且成本较高,难于集成系统化。传统的接触式扫描法需要同样长度且精度更高的直线度物理基准,因此高精度长导轨直线度误差的直接扫描测量是困难的[7],并且该法还受到导轨滑块角度运动误差的影响,由于角度误差和阿贝偏位的存在其测量结果是包含了阿贝误差的直线度,并非导轨真实的直线度。因此,提出一套快速准确的导轨直线度测量与调整方法对机床精度的提升具有重要意义。
激光光轴法的直线度测量已被广泛应用到多自由度测量系统中[8-9],本文基于激光光轴法结合范光照教授研发的双轴水平仪[10]提出了一种结构简单并且能够消除阿贝误差的导轨直线度与平行度测量方法。经过灵敏度标定实验,稳定性实验和比对实验证明了该测量系统的准确性和可靠性,可以用于导轨直线度与平行度的测量并完成了导轨直线度与平行度的校调实验。
1 测量原理
1.1 四象限位移检测原理
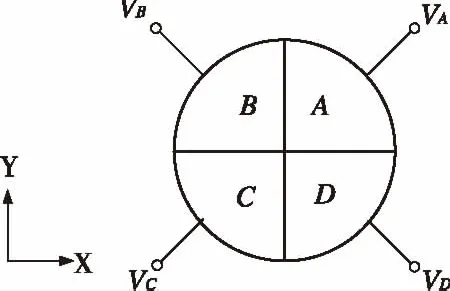
图1 四象限示意图
四象限是由四个性能完全相同的光电二极管组成,如图1,它能够感测到光斑偏离四象限中心的位移。当激光光线投射到四象限不同位置时,四个象限(A,B,C,D)的光电二极管接受到的光强不一致从而输出不同的电流,经后续电路转换输出不同的电压信号。利用公式(1)对电压信号进行简单的处理可得到光斑在四象限上的位置。
(1)
式中:VA,VB,VC,VD分别为A,B,C,D四个象限的电压;Kx,Ky分别为X方向和Y方向的灵敏度。
1.2 直线度与平行度测量原理

导轨直线度与平行度测量原理如图2所示,以激光光线1为基准测量基准轨的直线度,通过与光线1平行的光线2实现测量轨与基准轨的平行度测量。为了实现光线2与光线1的平行,引入了五角棱镜和水平仪,其中五角棱镜可以保证水平方向上两光束的平行,调节角度微调机构可使水平仪在俯仰方向上两次测量时读数相同并以此保证两光束在竖直方向上的平行。基于此原理搭建了图3所示的测量系统。该测量系统由激光器,五角棱镜,四象限和水平仪组成。四象限可接收来自激光器经五角棱镜反射后的光线,感测出光斑位置的变化。当四象限跟随导轨滑块移动时,导轨的直线度误差将会复映到四象限上,由四象限即可读出导轨沿竖直和水平两个方向上的直线度误差值。基准轨直线度测量完毕后,移动水平仪以及固联于其上的五角棱镜使水平仪读数与基准轨测量时读数相同,此时即可保证测量光线与基准轨测量光线平行,实现测量轨与基准轨的平行度测量。
2 实验
2.1 标定实验
由公式(1)可知四象限测量位移时必须先对式中四象限灵敏度Kx、Ky进行标定,本实验利用LICS-100A激光干涉仪(分辨率:0.01μm,精度:优于1μm)结合角锥棱镜完成了对四象限灵敏度的标定,如图4所示。图4(a)为水平方向的标定原理图,移动台可以向四象限提供微小位移,该位移量可由激光干涉仪结合角锥棱镜实现测量与采集,四象限的输出信号(电压比值)利用Labview软件实现数据采集,然后以四象限输出信号为横轴,激光干涉仪的读数为纵轴采用最小二乘法拟合出灵敏度Kx。同理,竖直方向利用五角棱镜将光线转折90°后,借助于升降台实现Ky的拟合,如图4(b)所示。
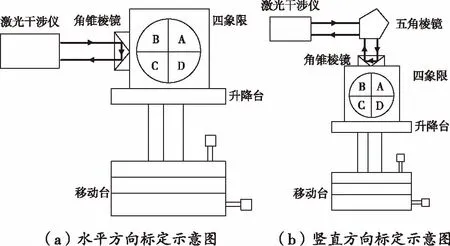
图4 四象限标定示意图
最终标定结果如图5。在±100μm的测量范围内,X向的标定残差在±0.6μm以内,Y向的标定残差在±0.2μm以内,拟合精度可满足导轨测量要求,因此可以确定该四象限X向灵敏度Kx=1981.98,Y向灵敏度Ky=1041.85。

图5 四象限标定结果
2.2 稳定性实验
为研究本测量系统的稳定性对该测量系统以1 S/s的采样频率进行1 h的零漂实验和10 S/s的采样频率进行10 s的短时间稳定性实验,零漂曲线和稳定性曲线如图6(a)、6(b)所示。由图6可知该测量系统1 h内的漂移在1.5 μm以内,短时间的数据波动在0.2 μm以内,说明该测量系统的稳定性较好,可用于导轨直线度的测量。
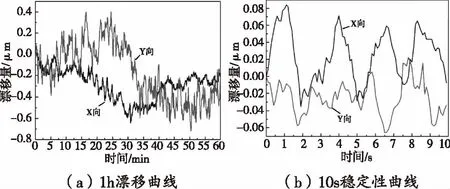
图6 稳定性曲线
2.3 比对实验
为证明该测量系统的准确性,根据GB/T 11336-2004水平仪法测量直线度的方法设计了如图7所示的比对实验,实验采用青岛前哨WL11数字水平仪(分辨率:0.001 mm/m),在中航世纪光学平台上对其随机选定的一条直线进行测量,以水平仪法测得的误差值为基准与四象限测得的误差值进行比对实验。因水平仪和桥板的尺寸关系,实验中四象限与水平仪的布局和尺寸如图7所示。水平仪与四象限固定于桥板上,桥板处于初始位置O0时,将四象限与水平仪的读数置零,然后滑动桥板至O1处,在移动桥板时必须使桥板的两支撑点首尾相接(如图7虚线所示),此时记录水平仪的读数为α1,四象限的读数为q1,如此依次移动桥板至Oi处,并记录水平仪的读数为αi,四象限的读数为qi。

图7 四象限比对实验示意图
根据GB/T 11336-2004水平仪测量直线度的方法Oi处的直线度误差Zi′可由公式(2)计算得出:
(2)
式中:L为桥板跨距;αi为水平仪的读数;Zi′为Oi处的直线度误差。
由于四象限读数qi不是Oi处的直线度,所以四象限测得的示值qi须转换至Oi处的直线度误差Zi才可进行比对。图8为四象限转换原理图,以桥板初始位置为相对水平位置,以四象限中心为原点,桥板移动方向为横轴,竖直方向为纵轴建立坐标系XOZ,则桥板可简化为线段OO0,桥板处于不同位置时其状态如图8所示。设水平仪读数αi逆时针方向为正方向,由图8可知桥板处于Oi处时,Zi可通过qi由公式(3)得出:
Zi=qi+2Lsinαi
(3)
最终两种方法求得的Oi处直线度误差值Zi′与Zi比对结果和残差如图9,由图可知本测量系统测得的各点示值与水平仪法测得的示值相比,残差在±2 μm以内,其精度可以满足导轨的直线度与平行度测量要求。
2.4 导轨直线度与平行度测量调整实验

图10 导轨调整装置
为了能够实现导轨在水平与竖直两个方向上直线度的调整,实验采用图10所示的导轨调整装置,通过Y方向上的水平调整螺钉挤压调整销调整导轨Y方向的直线度,竖直方向的直线度通过施以竖直调整螺钉不同的预紧力实现Z向直线度的调整。该调整方案依靠螺钉不同预紧力来调整直线度只能实现一个方向的调整,即Z向只能向负向调整,Y向只能向正向调整,因此,在正式实验之前需预先对导轨进行测量,判断误差方向,通过垫片将导轨垫至可调方向,然后再对导轨直线度进行测量与调整。实验中发现当先调整竖直方向直线度时,竖直螺钉的预紧力会使得水平方向直线度的调整难以奏效,为了避免竖直调整螺钉预紧力对水平直线度调整的影响,实验中测量调整顺序为先调整水平方向直线度,再调整竖直方向直线度。
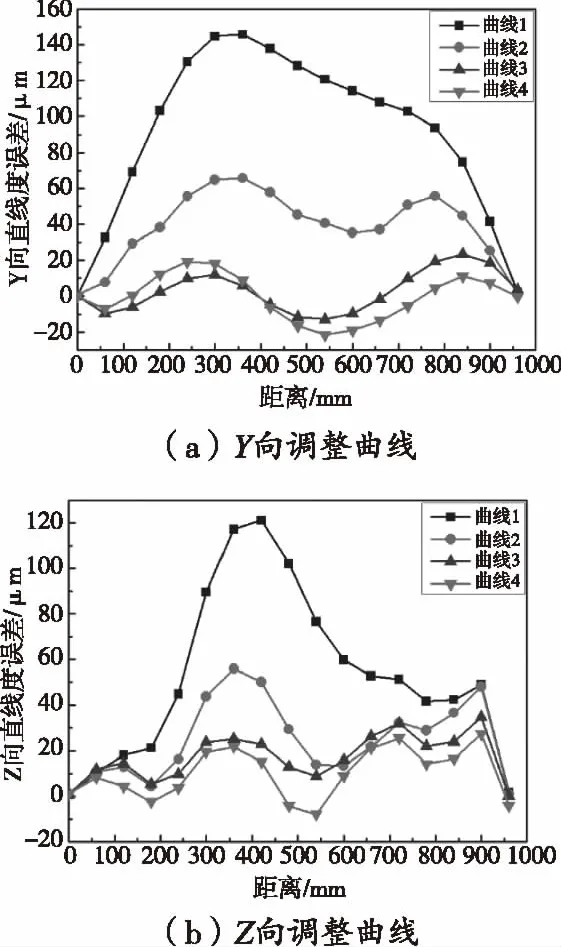
图11 基准轨调整曲线
在测量调整导轨过程中为了便于导轨直线度的评定和调整,对直线度的评定方法本文选择GB/T 11336-2004中两端点连线法。图11为基准轨测量调整曲线图,曲线1为初始测量结果,每次调整依照前一次直线度误差趋势从误差最大点处开始调整,导轨直线度的调整很难一次调整完毕,需要经过多次测量调整逐渐缩小误差才能达到最佳状态。经3次调整后最终基准轨两个方向的直线度误差曲线为图11(a)、11(b)中的曲线4所示。从图中可以看到经调整后的导轨直线度Y方向从未调整前的150 μm,降低至42 μm,Z方向从未调整前的120 μm,降低至36 μm,有效提升了导轨直线度。

图12 测量轨平行度测量调整曲线
导轨直线度测量完毕后,移动水平仪至平行轨处,调整其俯仰角,使水平仪读数与测量基准轨直线度时读数相同,以保证光线与基准轨测量光线平行。完成测量系统的光线调节后进行测量轨的平行度调整实验,测量调整过程同基准轨直线度测量调整过程,最终调整结果如图12,测量轨与基准轨水平与竖直方向的平行度误差经调整后分别从327 μm和524 μm降低至45 μm和51 μm。
3 结论
针对直线度传统测量方法的缺点,本文提出一套基于四象限结合双轴水平仪实现导轨直线度与平行度测量的测量系统。标定的实验表明:标定残差在±0.6μm以内;比对实验表明:比对残差在±2 μm以内。标定实验和比对实验结合稳定性实验证明了该测量系统的可靠性,可用于导轨直线度与平行度的测量。最后利用该测量系统完成了导轨直线度与平行度的校调实验,实验结果表明基准轨水平与竖直两个方向的直线度误差分别从150 μm和120 μm降低至42 μm和36 μm,测量轨与基准轨在水平与竖直方向的平行度误差也分别从327 μm和524 μm降低至45 μm和51 μm。
猜你喜欢
计量学报(2022年7期)2022-08-23
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
中国特种设备安全(2019年7期)2019-09-10
吉林农业(2019年7期)2019-04-01
质量技术监督研究(2018年6期)2019-01-15
新能源科技(2018年10期)2018-02-15
制造技术与机床(2017年6期)2018-01-19
计算机测量与控制(2017年12期)2018-01-05
制造技术与机床(2017年8期)2017-11-27
重型机械(2016年1期)2016-03-01
