智能小车的循迹控制系统的单片机设计研究
2018-11-19 09:14路雪松金亚玲
时代农机 2018年9期
李 心,路雪松,金亚玲
(沈阳工学院,辽宁 抚顺 113122)
STC89C52单片机属于51单片机系列,具有结构简单,便于理解,输入输出共计40个引脚,P0-P4四组P口,并且STC89C52比STC89C51多了一个中断源和定时计数器。
电机驱动模块:采用功率三极管作为功率放大器的功能,来实现对直流电机进行输出控制。电机驱动模块是一个线性型驱动的电路的结构,该电路具有结构简单,速度较快的能力很强,具体电路采用由达林顿管组成的电路,电路如下图所示。用单片机控制达林顿管使之工作在占空比可调的开关状态下,精确调整电动机转速。这种电路长期工作在开关状态下,两种工作模式下,分别是饱和状态和截至状态,开关效率非常高,该电路保证了电机的转速和电机的转动方向的控制,开关速度的稳定性也极强,是一种使用率很高的PWM调速技术。
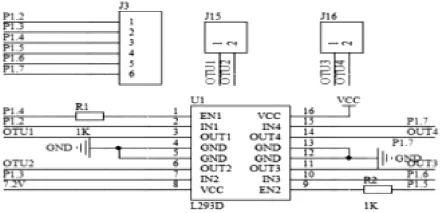
图1 电机驱动模块接线图
通过程序与硬件的紧密结合来实现小车的各种功能。用keil μVision4进行编写程序,先新建一个工程,然后编写C语言程序,然后添加到该工程中并生成十六进制文件即可,先安装烧写软件和驱动,然后让传输线与小车相连,打开烧写软件,将所生成的程序烧写到单片机中。
通过单片机引脚的输出控制两个电机的旋转,使用占空比实现两个电机速度的控制。两个电机相同速度正转即为前进,相同速度反转即为后退,左电机速度小于右电机速度即为左转,右电机速度小于左电机速度即为右转,这几种运行状态构成了小车最基本的行动功能。
小车底部的两个红外传感器发射红外线光,通过能否接收到反射回来的红外线信号来控制电机的运行状态。如果左侧红外光照到黑线处,黑色的反射能力很弱,接收器没有接收到反射回来的光信号,则单片机就会控制左侧电机停转使小车左转。同理,如果右侧红外光照到黑线处,小车就会右转。这两个动作周而复始,就实现了小车的循黑迹功能。小车循迹程序流程图如图2所示。
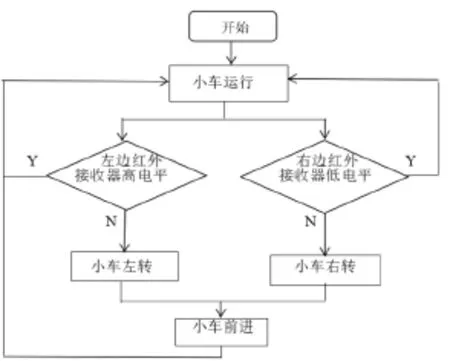
图2 循迹程序流程图
该控制系统具有较好的控制和调速、转向功能,能按预期的期望实现小车的循迹功能,对黑线循迹效果很好。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
快乐语文(2020年36期)2021-01-14
少年文艺·我爱写作文(2020年11期)2020-11-23
科学大众(2020年17期)2020-10-27
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
饮食与健康·下旬刊(2017年12期)2017-12-06
电子制作(2017年1期)2017-05-17
少年文艺·我爱写作文(2016年9期)2016-05-14