
基于光谱微型检测室互补温度控制器设计
2019-03-05 08:05魏康林戴贤明
传感器与微系统 2019年3期
魏康林, 吕 聪, 周 丰, 戴贤明
(1.三峡大学 电气与新能源学院,湖北 宜昌 443002; 2.三峡大学 计算机与信息学院,湖北 宜昌 443002)
0 引 言
目前,微型检测室在环境、材料、医药、生化等诸多领域有着广泛而重要的应用,特别是光学光谱分析的测量方面。运用光谱分析相比于传统的检测方式,实验方法上具有检测时间短、操作简单的特点,测量结果上有误差小、稳定性好的优点。但光谱类分析仪器对外界稳定性要求很高,其中检测室恒温控制是测试处理和检测的重要条件之一。经所在团队开发仪器实验数据表明:温度上升10 ℃,光强波动会对检测结果造成5 %左右的误差。所以温度精确控制是保证样品检测重复性和准确度满足要求的关键。设计一种基于加热棒快速加热和帕尔贴稳定恒温的样品检测室气浴恒温系统[1]。测试发现,该温度控制系统能够有效提高检测准确度和稳定性,满足光谱分析类的微型检测室对温度控制的要求。
1 系统结构和工作原理
温度控制系统主要由信号采集电路、微控器、帕尔贴驱动电路、加热棒驱动电路组成[2]。通过微控器设定目标温度,利用数字温度传感器读取实际温度,比较产生误差值。根据误差值大小来驱动加热棒,再调节脉宽调制(pulse width modulation,PWM)波形,推动温度控制执行驱动器金属氧化物半导体(metal-oxide semiconductor,MOS)管,输出命令使TEC进行加热或制冷,从而使样品室的温度向设定的目标温度值靠近。微控器每间隔一定时间读取一次数据,对温度进行实时闭环控制,方便根据具体需求精确控制
样品反应室的温度。整体系统中,微控器利用模糊比例—积分—微分(proportional integral differential,PID)算法控制帕尔贴起恒温调节作用,相对于加热棒的大功率加热效应,微控器设定温差等级单独控制加热棒,形成加热棒和帕尔贴的双加热互补体系,便于调节[3]。如图1所示。
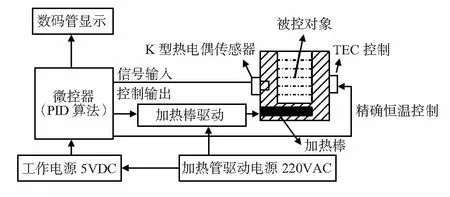
图1 温度控制整体系统结构
2 系统硬件部分
硬件电路主要有三大模块:传导热敏电阻驱动、加热棒驱动、帕尔贴驱动。
1)DS18B20为测温芯片。电阻热感应快、灵敏度高,可准确反馈温度数据。结构上采用三线制,减少了外部硬件电路,具有低成本和易使用的特点[4]。
2)加热棒为主要加热器件,选型根据开关电源容量分配和器件经济性,采用12 V/40 W的加热棒。图2为加热棒的驱动电路,微控器的命令经过光耦隔离器,然后传输继电器引脚导通来控制加热棒是否工作。电路中光耦PC817来阻断上下级电路的信号干涉和保护减小过电压的影响。

图2 加热棒驱动电路
3)帕尔贴负责恒温精确控制,主要利用帕尔帖效应进行电热转换。即帕尔贴通以不同方向的电流时,可对与其相接触的物体制冷或制热;当电流导向确定时,温差大小与其工作电流大小成正比。
帕尔贴驱动电路采用MOS管组成H桥,然后根据微控器输出不同的PWM波[5],再经过自举电路升压至MOS管的导通电压,来确定帕尔贴工作方向和导通时间,快速调节温度,达到目标要求[6]。如图3所示。

图3 帕尔贴驱动电路
设计实体是被金属铜槽包裹反应皿,铜相比水浴加热速度提高很多,受热相对均匀。加热棒在金属槽底部,右边紧贴帕尔贴。加热棒底部设计更有利于传热,不会影响测量部分的光学检测。帕尔贴起恒温调节作用,置于金属槽两侧且均加了散热风扇,设计简单,功耗也大大减少。
3 系统控制算法
微控器采用STM32芯片应用的是嵌入式设计的ARM Cortex—M3内核,时钟频率高、计算速度快、引脚多可以拓展多种外设,有利于后续计算处理应用开发[7]。
3.1 温差等级快速升温处理
实验累积的经验得知,加热棒具有升温速率高、温控滞后性大、不易精确控制的特点。本文利用检测温度差值大小来控制加热棒的工作时间。
首先,STM32系统启动,对应引脚时钟端口初始化,然后设定目标温度值,并读取DS18B20传输温度信号,计算两者的温度差。为了对应微型检测室实际工作需求,并根据实际测试结果,将不同的温度差分3个模块等级驱动加热棒,各模块驱动时间差控制加热棒效果。使实际温度大约与目标温度在±3 ℃差值裕度,然后关闭加热棒驱动体系。系统开始利用模糊PID算法来调节帕尔贴的输出恒温控制,使温度调节更加精准的接近目标值并维持恒温[8,9]。如图4所示。

图4 温度控制系统流程
3.2 模糊PID算法恒温控制
微型检测室多数用于反应室,既要检测分析物质,又要供物质进行反应。温度控制对其分析测量影响很大,须提高对其控制水平。模糊PID控制不仅具有智能控制自适应、自组织的能力,能够辨识过程控制参数、适应被控过程参数的变化,且具有常规PID控制器结构简单、稳定性好、可靠性高的特点[10]。
模糊PID参数自整定控制方式[11],首先要找出PID 3个参数与控制偏差e和偏差斜率ec的关系。然后制定模糊规则,系统监测数据不同配对不同的规则,来修正PID参数达到快速调整的效果。根据长期工作经验和参考文献[12,13]可以获得以下规则:
1)当系统的偏差e较大时,为加速系统调节速度,比例参数P取较大值,为了避免超调响应,积分参数I设为0;这时的微分参数D可根据具体系统来调节大小。
2)当系统的偏差e适中时,参数P取较小值来减小超调反应,参数I适当,这时微分参数D会对系统的响应速度产生极大影响,参考文献和根据经验来调节。
3)当系统的偏差e很小时,参数P和参数I取大值,设置参数D与偏差斜率ec成反比。
结合参数自整定原则和设计仪器的温度控制原理[14],确定输入输出量的论域偏差e、偏差斜率ec和ΔKP的论域为{-3,-2,-1,0,1,2,3},而ΔKI和ΔKD的论域为{-0.3,-0.2,-0.1,0,0.1,0.2,0.3},各个数字代表{负大,负中,负小,零,正小,正中,正大},其隶属度函数均采用三角形隶属函数。如图5所示。

图5 隶属函数
根据隶属函数,参考温度PID的文献[15]得出模糊控制规则库,系统按照反馈回来的数值应用隶属函数模糊化,对照模糊控制规则库判定修正值的模糊量,最后解模糊输出准确修正值对PID参数进行修改,达到控制要求。
4 系统测试
4.1 温度控制精确度
为测试微型检测室的温度控制是否符合要求,设定温度控制在42 ℃。将反应完全的待测样品放入系统中对其进行温度调控,观测时间为8 min,实验结果为0~8 min内每间隔1 min对应的温度为22.8,30.6,36.3,39.3,40.6,41.6,41.8,41.8,41.8 ℃。表明,所设计的控制系统温度误差小于0.2 ℃ ,满足一般微型检测室的要求。系统设定值为42 ℃,测量的温度量为反应皿中液体的实际反应温度,对比会有误差的存在。该误差与检测物体温度差异、控制算法、外界温度有关。
4.2 同类型温度控制的实验数据对比
图6为现有的水浴温度控制曲线。设定温度为41 ℃,1 min测1次,大约在25 min左右温度逐渐稳定。系统温度误差控制在0.5 ℃以内。采用大功率帕尔贴进行调控,温度调节时间太长,影响后续的反应和实验测量。

图6 水浴恒温控制
图7为本文提出的互补温度控制系统效果,温控设置为42 ℃,由于温度变化相对迅速,而且稳定时长较短,所以20 s记录1次数据,大约350 s左右温度就迅速稳定,相比水浴温度控制系统,稳定速度提升70 %,而且温度控制精度也相对较高。

图7 互补温度控制
5 结 论
提出并设计了一种新型气浴恒温控制系统,基于加热棒快速加热和帕尔贴精确恒温温度控制系统。实验结果表明:这种新型加热棒帕尔贴互补系统的优势,可以根据不同,环境调节温度迅速达到要求,可以减少检测器皿中反应的温度波动,最终实现快速恒温的目标。同时,相比于传统的温度控制微系统,提出的温度控制可以快速实现稳定、节省时间,满足一般检测仪器对温度精确快速控制的要求,加快后续的操作流程,减少了实验误差。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
当代水产(2022年1期)2022-04-26
设备管理与维修(2021年23期)2021-02-10
科技视界(2020年15期)2020-08-04
文萃报·周二版(2018年42期)2018-10-21
女士(2017年9期)2017-09-21
制造技术与机床(2017年3期)2017-06-23
电子制作(2016年21期)2016-05-17
中国设备工程(2015年5期)2015-12-08
自动化与仪表(2014年10期)2014-02-26
