
基于分类的感兴趣目标检测算法及仿真验证
2019-03-05 08:05王立鹏闫文敏项祎祎张新玉
传感器与微系统 2019年3期
王立鹏, 刘 宾, 闫文敏, 项祎祎, 张新玉
(1.中北大学 信息与通信工程学院,山西 太原 030051;2.中北大学 信息探测与处理山西省重点实验室,山西 太原 030051;3.瞬态冲击技术重点实验室,北京 102202)
0 引 言
在被遮挡的情况下对目标进行信息探测、识别与跟踪,前景遮挡对目标信息的获取与分析带来了很大的挑战。传统基于单一视角对三维场景信息的二维投影成像,在前景遮挡情况下,直接对目标的精确位置定位、姿态分析等问题产生了很大的影响。在冲击过程动态测试中,典型的是子弹冲击靶板的后效参数动态测量问题,一直是领域内的测试瓶颈。基于高速相机能够实现对高速运动目标有效探测,但冲击过程往往伴随着破片和目标的同时存在,并且相互遮挡,影响了感兴趣目标的有效探测。合成孔径成像技术能够“透视”遮挡,通过足够多的视角对场景进行成像,获取足够的光线,“绕过”前景遮挡对目标进行探测。
近些年来,合成孔径成像技术一直被国内外研究人员广泛的关注,针对目标重建等问题开展了相关的研究工作,并也取得了很多的研究成果。Vaish V等人[1]基于传统合成孔径成像技术直接对光场中的所有像素进行平均,没有任何选择性的步骤,因此,重建结果会受到前景遮挡物的影响。而后其利用四种不同的代价函数对被遮挡物体进行重建,但当遮挡物的颜色分布均匀和遮挡物超过50 %时,其算法可能会失效。Boykov Y和Jolly M P[2]率先将二值标记问题应用在所提出的基于组合优化的图割算法二值图像分割问题上。Pei Z等人[3]提出了利用能量最小化方法对图像中的像素进行判定是否为前景遮挡物,并进行标记。Ma W等人[4]提出了一种非结构感知的合成孔径成像方法,创造性地使用最近邻聚类算法实现最大聚类的所有信息,还利用聚类得到的信息来决定合成图像中的有效投影点。刘
严羊硕等人[5]利用多视角图像组成的极平面(EPI)对前景物体边缘深度求解、扩散,并对前景光线进行标记后进行合成孔径成像。由于该算法中深度求解对边缘信息的高要求,使得其无法适应复杂多变环境。Song Z等人[6]针对遮挡情况下利用“自动增长”和遮挡焦平面估计对前景遮挡进行估计与边缘分割,然后对边缘检测之后的图像进行图像合成。
本文针对上述问题采用编码孔径成像方式实现在单高速相机模式下的多视角高速目标获取,同时结合自适应窗口分类方法和合成孔径去遮挡算法实现破片和弹丸信息的有效区分。通过仿真实验实现弹丸信息的有效提取,验证了所提算法的有效性。
1 基于孔径编码的多视角成像系统设计
根据覆盖场景区域大小、空间分辨率、视差等要求对孔径编码成像系统进行了设计。
针对侵彻过程场景中子弹运动速度快、场景瞬时变化大等特点,需采用高速相机对场景信息进行获取,如采用多个高速相机组成相机阵列进行图像获取则成本过高,基于单个高速相机多视角的成像系统模型[7,8]能够解决上述问题。
系统模型如图1所示。一个摄像机与透镜阵列组成的二次成像系统,透镜阵列对三维物体进行二维信息获取,得到子图像,即一次成像。透镜阵列中的每一个子透镜都具有相同的焦距、相同的形状和大小。然后再通过主相机对透镜阵列获取到的子图像进行二次获取。

图1 系统模型

(1)
式中T1为三维场景物点与透镜阵列的距离,θ0为光线的方向坐标。由于T1远大于子透镜孔径的大小,故用T1代替。进行光轴平移,将主光轴转换到第q个透镜光轴
(2)
式中φ为子透镜的孔径大小T1。为了简化描述,将透镜阵列的子透镜当作薄透镜进行处理。光线经过焦距为f1的子透镜后
(3)
将透镜的光轴转换到主光轴
(4)
同理,光线经过一次成像像距传输T2、二次成像物距传输T3、焦距为f2的主镜头传输以及二次像距传输T4,光线最终到达CCD像面。根据三维场景物点的位置与各子透镜的位置信息,可以得到三维场景点y通过不同的子透镜在二次像面上所成像的视差d[7](以第q个和第p个子透镜为例)
(5)
如图2所示为仿真多视角成像系统获取场景的多视角图像,各个视角之间都具有视差。

图2 场景多视角图像
2 基于群目标分类的感兴趣目标检测算法
根据Rodriguez A和Laio A[11]提出新的聚类分析方法可知,数据点i的局部密度定义如下
(6)
其中,当x<0时,χ(x)=1,当x≥0时,χ(x)=0;dij为两点之间的空间距离,dc为截断距离。上式为统计与点i的距离小于dc点的个数。对所求场景中有效数据点之间的距离d进行求解和排序,构成距离集合。在距离集[1,dmax]中选取适当的距离范围[1,dc]对有效数据点的局部密度进行统计,对所求的局部密度进行排序。利用最大局部密度和适当的距离范围确定待聚类数据点集合;由于各视角的差异性,不同视角所获取的有效场景信息不同。有效场景点数越多,自适应窗选择进行聚类的点数就多,反之亦然。图3所示为场景中同一时刻不同视角下图像的自适应区域选择结果(红框为自适应窗口)。

图3 自适应窗口选取结果
通过自适应窗选择待聚类区域,在区域内的有效点集χ中选择k个初始聚类中心C={c1,…,ck},按照点集χ中点与聚类中心的“距离”进行归类,“距离”即为彩色图像的欧氏距离,即
(7)
式中i≠j;i,j∈χ,而后对聚类中心进行重新更新,重复进行归类与更新操作,直到聚类中心不再变化。利用上述K-means++聚类算法[12]区域进行分类,将遮挡在弹丸前景的破片和弹丸区分开。
根据分类结果,对子弹目标光线类数据点Gi进行标记,而非目标光线不参与计算。f(j)的表达式如

(8)
式中j为图像中某一点,G(i)为“目标类”。
非目标光线去除:通过对I′(j)=f(j)×I(j)可以去除非目标光线,从而能够去除遮挡在子弹前景的破片射线。
由于冲击后效过程场景中有效点的分布、破片材质和弹丸材质反射的特性不同,采用自适应窗K-means++聚类算法有效减少聚类数据点数量,快速对弹丸与破片进行分类,与传统K-means算法相比有效减少分类点数,减少算法运算时间[13],对图像中数据量占比小的目标能够有效识别。
3 算法主要流程
1)自适应待聚类数据点集选取:根据各视角图像中有效数据点数量的不同,通过局部密度与空间位置对待聚类数据点集进行确定。单视角下有效数据点越多,相应的选取待聚类区域越大;反之亦然。
2)K-means++聚类对光线进行分类:仅在待聚类数据点集内进行聚类算法处理,以对“占比小”的目标进行识别,并对点集中的目标光线与非目标光线进行分类。
3)目标光线标记:根据聚类结果,对当前视角中的目标光线进行二值化标记,非目标光线不参与运算。
4)非目标光线筛选与合成孔径成像:根据各个视角对光线标记的结果,去除非目标光线。根据成像系统中各视角的标定结果,对各视角图像进行指定深度上的合成孔径成像。图4为某一视角下聚类与非目标光线标记结果。

图4 某一视角下聚类与非目标光线标记结果
4 实验结果与分析
针对弹丸侵彻靶板后效过程,本实验利用3DSMAX软件进行侵彻场景仿真。3DSMAX软件完成对场景的三维建模,3DSMAX中的Rayfire插件实现爆炸破碎特效,结合破片运动模型、导向板、重力等影响因素实现侵彻后效区域遮挡效果,后效过程不同位置下的遮挡场景通过选取虚拟相机的帧数来控制。本实验分别仿真了侵彻玻璃类材料与陶瓷类材料靶板,不同材质的靶板对应侵彻场景也不同,通过设置不同的破片大小、数量、分布特点以及破片模态的差异,特别是设置不同的折射率、反射光泽、漫反射粗糙度模拟玻璃类与陶瓷类材料,实现不同材质情况下的侵彻过程仿真。仿真实验模拟5行11列透镜阵列对场景信息进行多视角获取,单个视角的像素数为649像素×442像素,各子成像系统的基线为14 mm。获取模拟场景的多视角图像信息。
实验中,对两种不同材质靶板的情况下所提算法与传统合成孔径成像算法合成图像进行对比。抽取图像序列中第3行图像对比两者重建图像的质量,从重建结果可以看出,所提算法的重建结果能够较清晰保留子弹目标边缘与细节信息,而传统合成孔径算法重建结果中子弹目标模糊不清,边缘信息遮挡严重。相比较而言,计算两类材料情况下所提算法和传统合成孔径算法合成图像的局部图像峰值信噪比。图5(a)为在玻璃类材料情况下所提算法比传统算法提高了6.529 3 dB,图5中(b)为陶瓷类材料合成图像的峰值信噪比提高了6.927 dB。
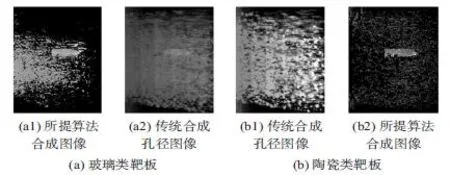
图5 本文算法与传统合成孔径算法结果对比
5 结 论
仿真实验表明:与传统合成孔径算法相比,本方法能够较好地合成被遮挡对象,在目标边缘与细节方面,表现更好。但本文方法仍有局限性,如果被测目标和遮挡物的颜色过于复杂多变或者两者反映出的信息趋于一致,算法不能很好的处理前景遮挡问题。后续本文作者将继续扩展相关的方法更好地提升重建质量。
猜你喜欢
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
潍坊学院学报(2021年2期)2021-07-22
幼儿画刊(2019年6期)2019-11-04
电脑知识与技术(2019年13期)2019-07-08
中外文摘(2019年8期)2019-04-30
浙江大学学报(工学版)(2015年1期)2015-03-01
舰船科学技术(2012年10期)2012-08-21
