
基于TDOA和PTP的高精度WLAN定位系统设计和实现
2019-04-18 09:34周俊杰沈亮杰
中国教育网络 2019年3期
文/周俊杰 沈亮杰
引言
随着“物联网”时代的临近,无线定位技术作为其中一项关键性技术,已经引起了工业界广泛的关注和国内外的研究热潮。无线定位技术在军事国防、车辆管理、抢险救灾、危险环境、自动化车间、物流管理等许多领域有着十分广阔的应用前景[1]。
无线定位技术以其定位精度的高低和定位范围的大小直接影响了定位系统的性能[2]。由于无线局域网(WLAN)的普及,基于WLAN(IEEE802.11X)的无线定位技术是最常见的,也是成本最低的定位方式。但现有的WLAN定位系统并不能满足这些新兴的分米级甚至厘米级的高精密定位应用要求。现有的WLAN定位技术主要通过信号强度(RSSI)进行定位。这类技术受信号传播环境的影响很大,普遍精度不高,误差通常大于10米,大大超出了许多高精度定位的实际应用的需要[2]。在无线精确定位领域,目前国内公司普遍采用的都是这种最简单的RSSI定位方式。在技术研发上,远远落后于国外同行。芬兰的Ekahau公司通过获取信号指纹的方式,获得了业界领先的WLAN定位精度,但也只是在理想情况下将定位精度提高到了3米左右[3]。英国的Ubisense和德国的Nanotron 能够提供分米甚至厘米级别的高精度无线定位解决方案[4]。但这两家公司的解决方案并不是基于常见的WLAN信号,而是基于工业用无线通信技术,比如UWB(超宽频 )和 Chirp Spread Spectrum (线性调频扩频), 这就意味着这两家公司的产品不能和普通的无线终端一起使用。另一方面,目前的商用WLAN 设备或芯片并不支持高精度的信号到达时间记录。
TDOA和PTP相关技术的应用研究
到达时差(TDOA)定位技术
到达时差(TDOA)定位又称为双曲线定位, 是通过处理三个或更多个测量站采集到的信号到达时间测量数据对辐射源进行定位[5]。在二维平面内, 辐射源信号到达两测量站的时间差规定了一对以两站为焦点的双曲线。如果利用三或四个站形成两条曲线, 则得到两对双曲线的两个交点,再利用其他辅助信息去除定位模糊, 从而可以确定辐射源的位置[6]。在三维空间中,至少需要形成三对双曲面来产生交点。形成双曲线的几何原理是:到两个固定点距离差为常数的动点的轨迹,是以这两个固定点为焦点的双曲线,平面上两条双曲线相交可确定一点。
图1中P点为被测点的位置,A(主站台)、B(副台)、C(副台)为 3个参考站台。若测得BP和AP的距离差为ΔD1,CP与AP 的距离差为ΔD2,以及AC距离,AB距离,则可分别由ΔD1、ΔD2在图上划出两条双曲线,交点P即为被测点的位置。
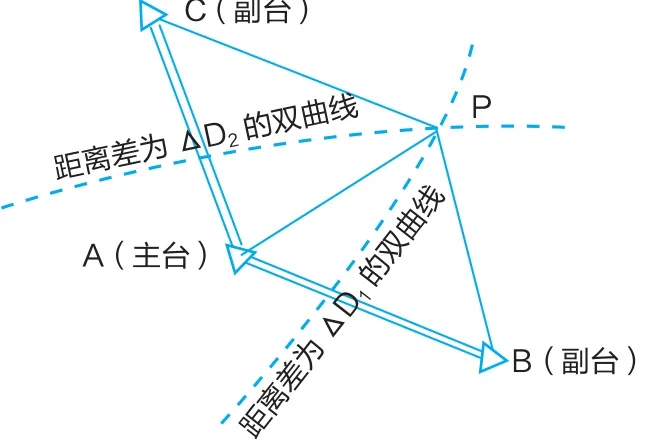
图1 TDOA到达时差(双曲线)定位原理
TDOA应用在WLAN定位(IEEE802.11x标准)的情况下是已知传播速度的,所以无线电波传播的距离与它传播的时间成正比。但这种测量方法需要注意几个问题:1.无线电波在非视距NLOS环境中的传播特性;一般的解决方法是增加测量次数,求出统计意义上的测量值。2.时钟精度问题;采用经典的异常数据(outlier)统计工具,过滤出带有NLOS误差的到达时间测量结果,提高其精度。3.时钟同步问题[7];系统中参与同一个定位过程的参考点之间必须保证时钟的同步。
同时,TDOA对信号到达时间记录精确度具有很高的要求,工业实现难度大,需要借助于先进的数字信号处理技术来实现。特别是基于WLAN的高精度到达时间差定位,不仅需要无线接入点 (AP) 之间实现纳秒级别的时间同步精度 (1纳秒的时间同步误差相当于10 ~ 30厘米的定位误差),还需要信号到达时间的记录误差也控制在几个纳秒之内。但目前市场上比较可行的AP之间的时间同步精度仅能达到微秒或毫秒级, 并没有比较成熟的可以利用TDOA高精度定位方法的 WLAN定位方案。GPS或北斗授时模块可以提供纳秒级的同步精度,但无线AP通常安装在室内,属于卫星信号盲点的位置上,因而这种时钟同步方式并不能满足于大多数的WLAN定位系统的要求。
IEEE1588v2(PTP)精确网络时钟同步技术
IEEE1588v2[8], 也称为PTP (Precision Time Protocol),是参照国际标准“IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems,IEEE Std 1588TM-2008,March 2008”的新一代 (2008年完成协议标准化)的时钟同步技术。其主要特点是适用于多种授时拓扑, 能将一个IP或以太网络范围内的所有节点(比如WLAN AP)同步到一个公共基准时钟源(如GPS/北斗)并达到亚微秒 (us) 同步精度。PTP时钟同步占用网络带宽小,可重用现有连接AP的WLAN网络。
正是基于此原因,我们选择校企合作单位的IEEE1588v2高精度时钟设备PTPGrand-2100[9],作为WLAN网络授时的时间信号源;以及其PTPWatch网络时钟监测仪,作为WLAN网络中定位服务器与各TDOA-AP接入站及定位终端之间交互时的精确时钟同步监测工具。IEEE1588v2主时钟设备PTPGrand-2100如图2所示。
PTPGrand-2100内嵌IEEE1588v2的高精度网络时钟协议栈软件(Protocol Stack)。该协议栈实现了完整的IEEE1588v2的功能,包括IEEE1588-2008协议引擎,最佳主时钟竞争(BMC)算法,软件或硬件时间戳,标准定义的各种时钟状态和模式以及网络通信及报文管理机制[10]。该协议栈既可作主时钟,亦可作从时钟,取决于BMC算法竞争结果或用户设置。在有外部时钟参考源时,PTPStack-1000能够以优于+/-50ns(硬件时间戳)或+/-10us(软件时间戳)的精度锁定该参考源[11]。
高精度WLAN定位系统的架构设计
为了解决室内WLAN定位目前难以达到分米甚至厘米级的高精度问题,综合以上相关技术的研究和应用,提出以到达时差原理(TDOA) 和IEEE1588v2(PTP)精确网络时钟同步技术为基础,结合非视距测距误差消除等技术,集成设计出一套基于现有WLAN(IEEE802.11x系列标准)设备的高精度(分米级)实时定位解决方案。
定位系统的框架
基于TDOA 和PTP的高精度WLAN定位系统,其逻辑框架如图3所示,主要由位置感知层、网络传输层和定位应用层三部分组成。
首先在位置感知层,基于SDR等嵌入式技术开发设计出支持IPv6协议的定位AP,实现物理层无线信号到达时间的精确测量和信号到达时间差(TDOA)的定位计算,并将PTP数据报文交付网络传输层设备。
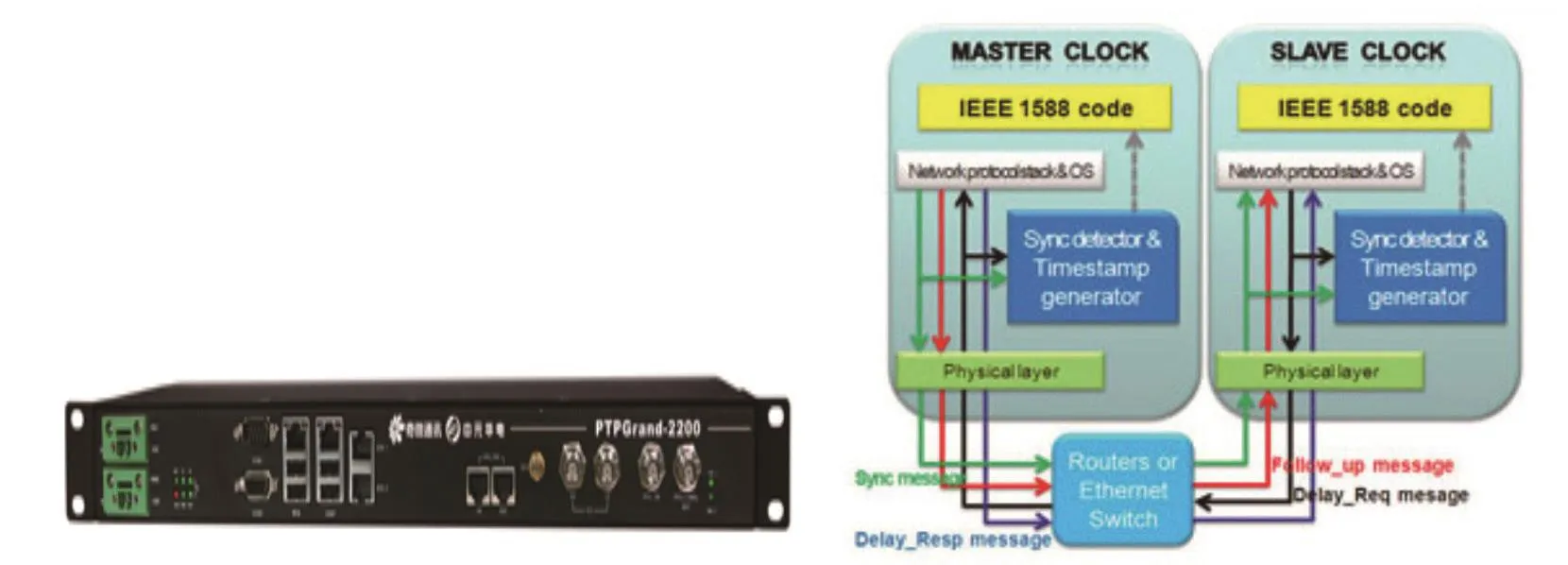
图2 纳秒级主时钟设备PTPGrand-2100与同步软件IEEE1588v2协议栈
其次是网络传输层,用于位置感知层和定位应用层的联通,基于IPv6网络将位置感知层获得PTP报文信息传送至定位应用层。同时接入IEEE1588v2(PTP)国际标准主时钟,通过双栈(IPv4/6)路由交换机多跳时延补偿和非对称补偿算法的综合应用,保障WLAN接入点(AP)间纳秒级别的时间同步精度 (1纳秒的时间同步误差相当于10 ~ 30厘米的定位误差),将无线测距的时域误差控制在5ns以下。
最后是定位应用层,设计开发定位引擎和定位应用平台。基于非视距误差的时变稳定性原理,定位引擎在服务器上通过NLOS误差过滤和定位前数据预处理,最大程度的消除NLOS误差的影响。再基于TDOA定位算法对数据进行解算,实现分米级别或更高精度的位置估计。定位应用平台根据定位引擎解算出的实时位置信息,并结合GIS等系统,可展示位置区域和相关应用,实现人机交互。
整套系统组成中包括了IEEE1588v2主时钟、TDOA WLAN接入站(TDOA-AP)、定位服务器以及被定位终端设备等,各个设备在统一时钟步调下协同工作,实现各自的功能。
1.IEEE1588v2主时钟:采用铷钟进行时间保持(GPS可选),通过IEEE1588v2协议栈与各TDOA WLAN接入点(TDOAAP)进行交互,实现各AP间的时间同步。主时钟采用PTPGrand-2100设备作为WLAN网络授时的时间信号源,以及采用PTPWatch网络时钟监测仪作为精确时钟同步监测工具。
2.TDOA-AP:是系统的重点部件,采用嵌入式设计与开发。除了支持IPv6 的协议栈,采用Wi-Fi transceiver模块之外,还将新增一个可编程模块(FPGA)。FPGA模块中实现了专有的高精度1588v2模块支持上行(主时钟方向)方向的PTP时钟同步,进行本地时钟校准,并针对来自主时钟方向的1588报文打上硬件时间戳,以及记录来自移动终端方向的定位信号到达时间戳等功能。
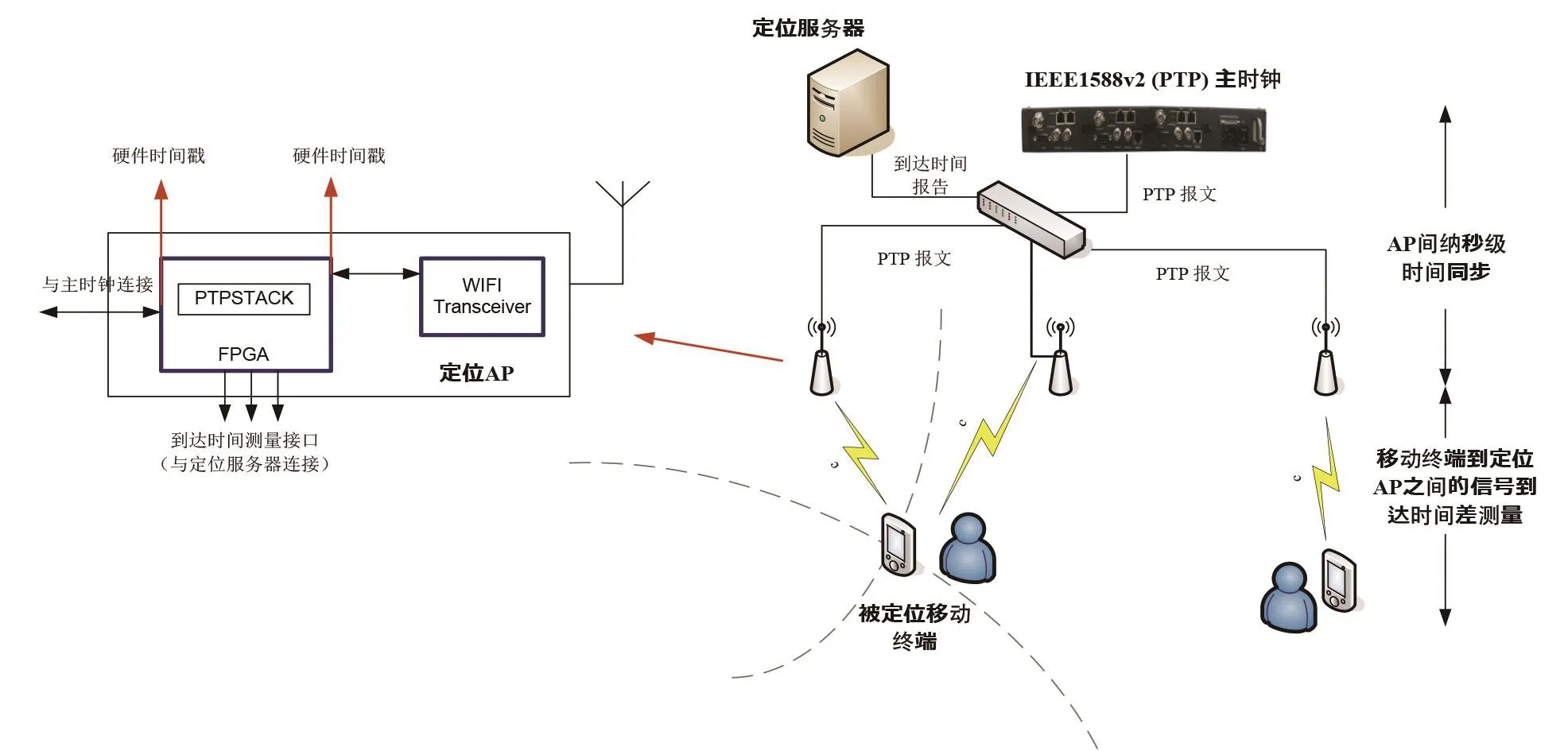
图3 基于TDOA和PTP的高精度WLAN定位系统架构
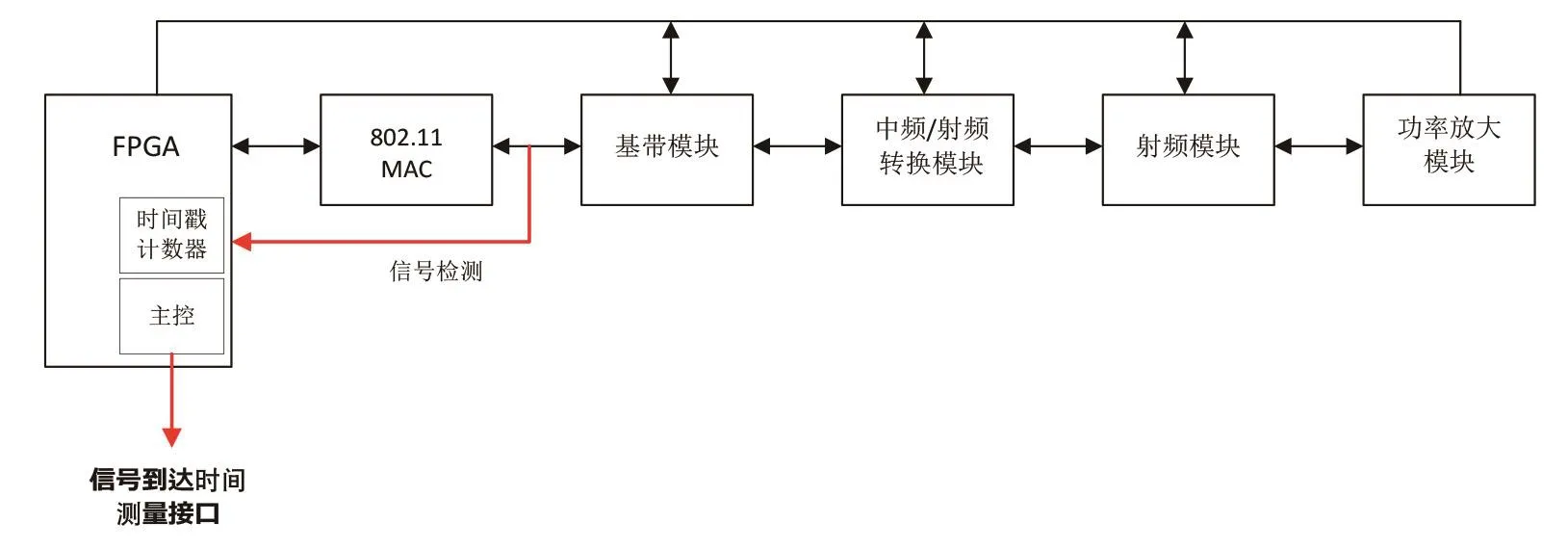
图4 基于软件无线电的物理层对定位信号到达时间的测量
3.IPv4/IPv6双栈交换机:选用市场上支持IPv4/IPv6双栈协议的交换机,进行必要的802.1q Trunk 链路、透传模式和IPv6地址DHCP策略等配置,以使所连接的TDOA-AP完成IPv6协议下封装的PTP报文的快速转发。
4.定位终端: 每个被定位的移动终端在移植的软件程序控制下,定时向AP发送定位信号。定位终端程序的开发主要需要解决低功耗,集成度高体积小等工程挑战。
5.定位服务器:定位服务器上运载定位引擎和定位应用平台,其主要功能是采集WLAN中一个或多个无线定位站所提供的定位信号到达时间,并进行信号到达时间差(TDOA)的定位计算,可实现终端LBS分析、定位数据管理、位置报告、轨迹显示、系统复位等功能。
关键技术分析及实现方案
基于TDOA和PTP的高精度WLAN定位系统设计中,其关键技术创新点和难点主要体现在对WLAN定位系统中的高精度物理层无线信号到达时间的测量、基于IEEE1588v2标准的AP间精确时钟同步、非视距误差(NLOS)消除及定位前的数据预处理等三方面的内容。具体的解决和实现方案如下。
1.高精度物理层信号到达时间测量为了尽可能降低信号到达时间记录的误差,提高TDOA定位精度,如图4所示,我们拟通过一个软件无线电架构,将一个WLAN AP系统中的802.11MAC、基带、中频/射频转换、射频以及功率放大芯片等模块整合在一起。信号到达时间的打戳点(Time-Stamping Point)为在802.11 MAC与基带处理模块连接的数据通路上。基于具有高速可编程逻辑门阵列 (FPGA)和多核DSP处理器的开发板,通过专有的无线信号识别算法,实现在开发板数据总线上探测到Wi-Fi信号,打上时间戳,从而将定位信号的到达时间记录精确到纳秒级,避免了系统在MAC层及以上的协议栈中的处理误差。
2.基于IEEE1588v2的AP间精确时钟同步
为了解决系统的精确时钟同步问题,我们基于IEEE1588v2(PTP)协议,通过一系列的技术创新,包括网络流量预测、多跳时延补偿和非对称补偿等算法,实现80ns以下的单跳时钟同步精度。这意味着AP间用一个交换机连接时, AP间的时间记录误差可控制在单次测量80ns以下。通过多次测量之后,我们还将进行误差分布的建模(获取其概率分布,均值,方差等),将最终误差控制在5ns以下,从而将TDOA定位的误差可控制在1米以下。
3.非视距误差消除技术
在定位AP和被定位信号源之间存在非视距(NLOS)信号传输的情况下,基于TDOA的测距或定位精度也会受到影响。通过理论研究,采用信号指纹和TDOA混合定位,并基于非视距(NLOS)误差的时变稳定性的原理,通过NLOS误差过滤和定位前数据预处理,我们可以最大程度的消除NLOS误差的影响,实现分米以下的TODA定位精度。图5展示了居于非视距误差时变稳定性的原理,通过几何分析过滤NLOS测距误差的方法示意图[12]。
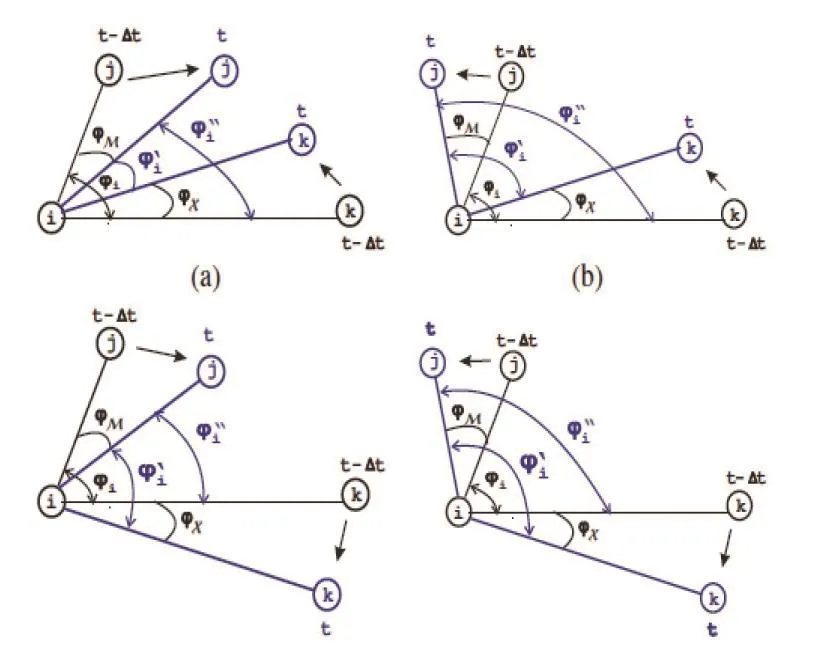
图5 NLOS测距误差几何分析过滤示意
除此之外,高精度的WLAN定位系统还涉及对定位AP原型开发设计,IEEE1588v2的TDOA-AP间纳米级时钟同步算法、非视距误差过滤算法、省电算法的设计与实现,以及嵌入式硬软件的系统集成、调试和优化设计部分,如图6所示。
4 .实验验证与关键指标测试
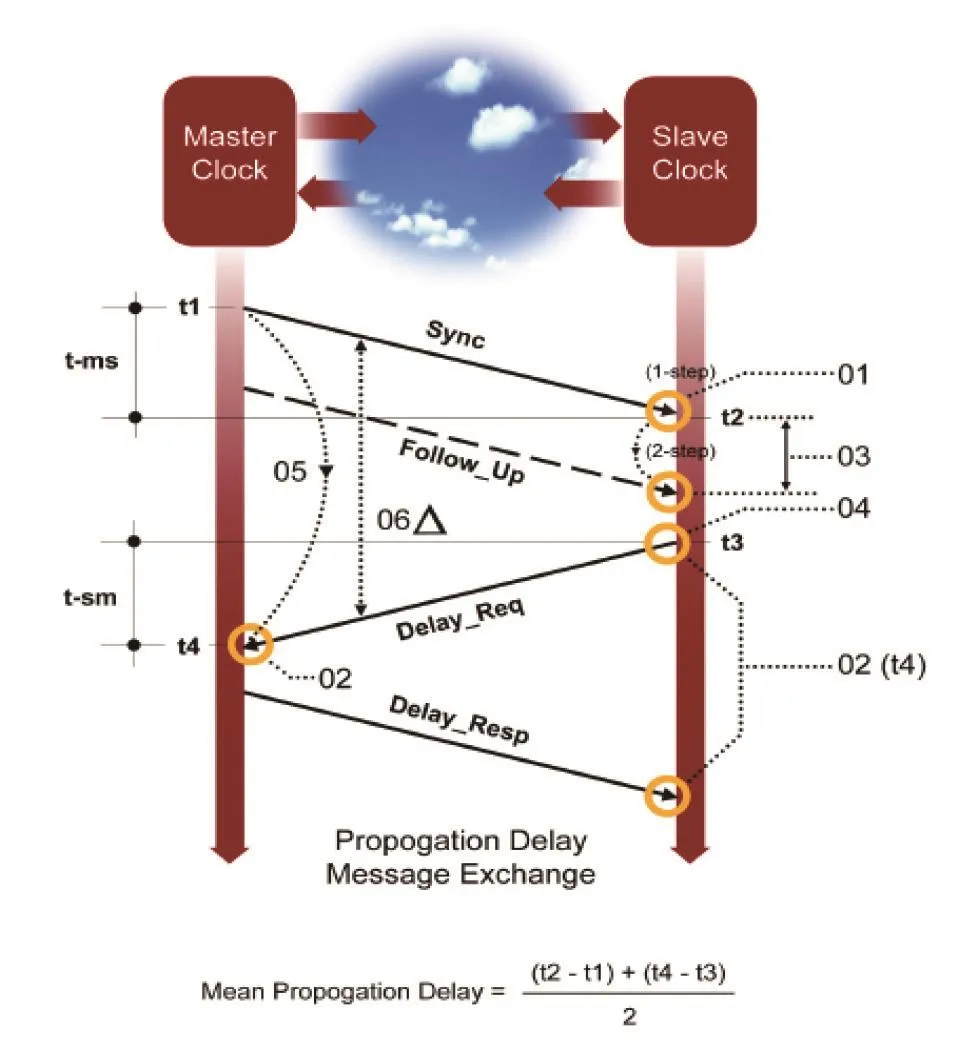
图6 基于IEEE1588v2的纳秒级时间同步技术示意
基于PTP和TDOA的高精度WLAN定位方案,应用于本校合作的某企业工业生产环境中进行实验测试。该定位系统实验方案按照表1中的TDOA+PTP系统设备进行配置,拟实现对工厂的人、车、物10厘米级的精度定位。通过在工厂测试区域内布设有限数量DOA-AP,工人手持已装SDR-S终端程序的Phone,将测试车、物贴上微标签,其位置信息在几纳秒内几乎零延时传送到控制中心的定位服务器上进行精确定位,实现工厂的精确管控以精益生产。
该实验测试了工业生产中人、车、物等对象的混合定位和分类管理,真正做到工厂物联网建设中精确、高效、实时的定位。TDOA+PTP系统搭建后,经过多次反复测试,获得其定位参数指标如表2所示。实验验证表明,本方案的定位技术指标明显优于UWB或CSS技术方案,且基于IEEE 802.11X通用WLAN信号,民用成本价格整体降低40%左右,具有极大的推广应用价值。
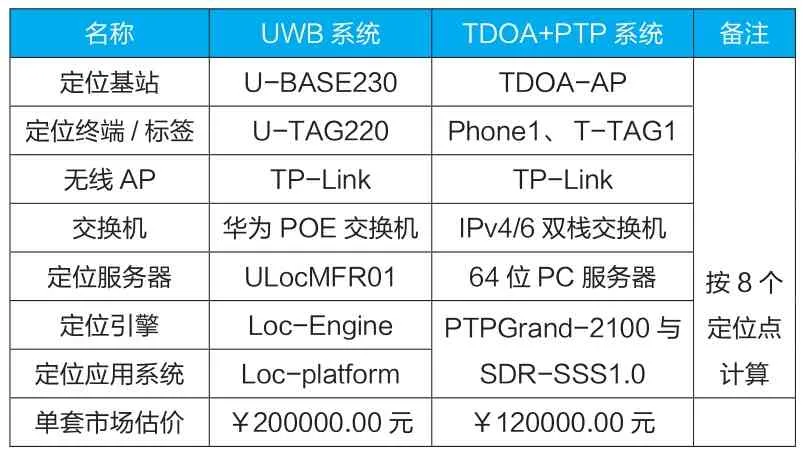
表1 定位系统实验设备配置
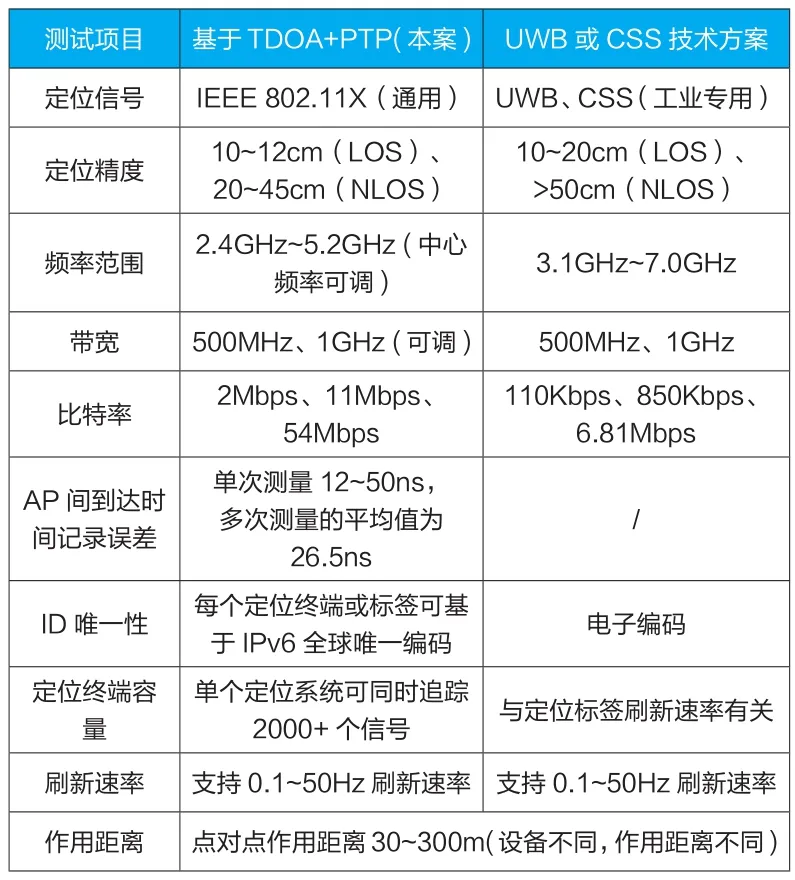
表2 系统定位参数测试与对比
点对点作用距离30~300m(设备不同,作用距离不同。
结语
随着物联网相关产业的迅速发展,各行业领域中关于无线定位的业务需求越来越多,特别是需要高精度WLAN室内定位的LBS位置服务[13]。本文以IEEE1588v2(PTP)精确网络时钟同步技术和到达时差原理(TDOA) 为基础,结合非视距(NLOS)测距误差消除等技术,研究和设计出一套基于现有WLAN(IEEE802.11x系列标准)设备的高精度实时定位解决方案,可广泛应用于移动互联网、物流管理、矿业勘探、医疗健康等方面。
基于TDOA和PTP的高精度WLAN定位系统,搭建在软件无线电网络通信平台上,完成Wi-Fi无线信号到达时间的精确测量,基于TDOA原理实现到达时间差的测距定位计算;并创新提出基于IEEE1588v2(PTP)标准,保障WLAN接入点(AP)间纳秒级别的时间同步精度;最后,系统通过NLOS误差过滤和定位前数据预处理,消除NLOS误差的影响,将无线测距的时域误差控制在5ns以下,从而实现分米或更高精度的位置估计。
系统后期将融入多跳时延补偿、非对称补偿等算法的综合应用,优化高速定位解算引擎,开放GIS等定位引擎API接口[14],逐步提高系统定位精度,满足系统集成商和终端用户多维的定位业务需求。
猜你喜欢
数学小灵通·3-4年级(2021年9期)2021-10-12
小学生学习指导(低年级)(2020年10期)2020-11-09
中国计算机报(2020年9期)2020-03-25
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2017年7期)2017-11-24
汽车与安全(2017年9期)2017-09-29
居业(2017年5期)2017-07-24
