存在等式约束的时差频差联合定位性能分析
2019-05-23 08:03张冠杰
舰船电子对抗 2019年2期
张冠杰
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引 言
随着无源定位技术的发展,基于多平台的高精度无源定位,在军用和民用领域都有着非常广泛的应用前景。在多平台无源定位技术中,利用多个观测平台接收目标信号的到达时差(TDOA)定位技术,从定位算法到误差分析都已有研究成果。针对空中运动平台,时差定位技术并未充分利用平台的运动特性。平台的运动特性导致接收信号的频率上产生多普勒频移,因此该频移隐含了目标的位置信息和相对运动信息。如果在测量TDOA的基础上,增加测量接收信号的到达频差(FDOA)信息,则可能会提高目标的定位精度。为了衡量运动多平台时差频差联合定位方法的定位性能,采用定位误差下界实现定位性能的度量。
文献[1]给出了多星对地面目标单次TDOA/FDOA联合定位的克拉美-罗界(CRLB)计算方法,分析了在地球表面方程约束条件下的单次定位CRLB分布图,验证了在单次定位情况下,联合定位比单独利用时差或者频差定位可以获得更高的定位精度。文献[2]给出了固定多站对运动辐射源的TDOA/FDOA定位方法,分析了单次定位误差的CRLB,以及利用滤波扩展卡尔曼(EKF)协方差估计了多次定位误差的CRLB。文献[3]分析了在等式约束条件下TDOA/FDOA单次定位的CRLB计算方法,并证明了带等式约束的CRLB比无约束的CRLB更精确。文献[4]分析了运动多站时差定位的多次定位误差CRLB。文献[5]分析了存在观测站位置误差时的多站时差定位误差CRLB。文献[6]分析了主动和被动2种情况下机动目标的CRLB,提供了一种矩阵理论分析方法。文献[7]分析了卫星干扰源定位中的误差影响因素。在以上文献的基础上,本文提出了一种运动多平台对地面固定目标的连续多次TDOA/FDOA定位的误差性能分析方法,推导了在有等式约束条件下的连续多次定位过程中的定位误差CRLB,并通过仿真实例验证了时差频差联合定位的性能优势。
1 TDOA和FDOA的定位模型
1.1 定位原理

目标辐射源到任何1对观测站i和j的频差与时差可表示为:
(1)
(2)

由公式(1)和公式(2)可知,TDOA与FDOA都与目标位置有关,而且FDOA与相对运动速度有关,因此观测量TDOA与FDOA可以同时提供关于目标位置的信息。对于二维定位,利用2个观测站可以得到1对TDOA和FDOA曲线,2条曲线的交点即为目标的位置,如图1所示。
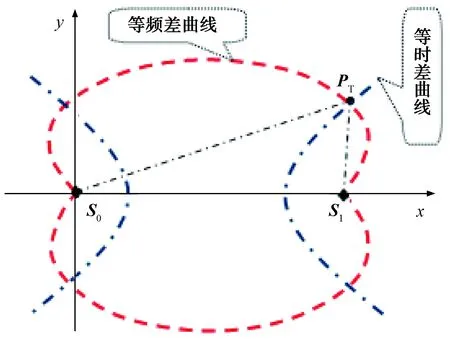
图1 二维平面TDOA/FDOA定位原理图
1.2 多次定位分析
在实际定位系统中,往往可以连续测量到多个TDOA和FDOA参数,而且利用连续多次测量的观测信息可以提高定位精度,为此需要研究多次定位的误差分析[2]。
假设目标是地面固定目标,则k时刻的目标状态定义为:
(3)
式中:A为状态转移矩阵;Γ为扰动矩阵;噪声w~N(0,Q),为x、y、z方向上的加速度噪声;T为采样时间间隔。
观测矢量Z由时差和频差组成,并且真实测量的时差值和频差值存在测量误差,可以建模为理论值加上高斯白噪声矢量,k时刻的观测矢量表示为:
(4)

假设uk服从高斯随机分布,其协方差矩阵为:
(5)

2 TDOA/FDOA定位的CLRB推导
克拉美-罗界(CRLB)表征了无偏估计量所能达到的最小协方差阵,为无偏估计量的方差确定了一个下限,这为比较无偏估计量的性能提供了标准。
2.1 单次定位误差的CRLB
针对地面固定目标,研究受地球方程约束的运动多站无源定位的CRLB更符合实际情况。首先,研究无约束情况下的单次定位误差的CLRB;然后,在此基础上,推广到有等式约束的CRLB。
根据系统模型,构建k时刻测量数据的联合条件概率密度函数为:
(6)
似然函数为:
(7)
构造Fisher矩阵:

(8)
将对数似然函数经过求偏导以及期望运算后,得到Fisher信息矩阵为:
(9)

由此得到联合定位的理论误差下界为:
(10)
式中:tr(·)表示矩阵迹运算。
式(10)表示无约束条件下的无偏估计器误差下界,然后将其推广到有等式约束情况下的误差估计下界,经过整理得到有约束的克拉美罗界[8]:
CRLBTDOA/FDOA=
(11)
(12)
式中:e=0.081 819 191 04,为地球曲率;K为等式约束条件关于辐射源运动状态的梯度矩阵。
考虑到目标辐射源位于地球表面,辐射源坐标满足地球约束条件:
(13)
2.2 多次定位误差的CRLB

(14)
(15)
式中:Jl(θ)为到l时刻为止的Fisher信息矩阵;Z为到l时刻为止的累积观测量。
由独立观测性条件可知:
(16)
于是有:
(17)
3 仿真试验
以3个运动平台定位为例,说明时差频差联合定位的性能优势,首先分析单次定位误差的CRLB,然后分析多次定位误差的CRLB。假设3个运动平台,构成一主两辅折线阵列形式,主站与辅站相距10 km,主辅站连线夹角150°,主站初始位置(114°,38°,5 000 m),载机速度为(0 m/s,-340 m/s,0 m/s),两辅站与主站保持固定的相对位置同速飞行,目标位置(117°,38.15°,5 000 m),载机位置误差50 m,TDOA测量误差60 ns,FDOA测量误差10 Hz,载频2 GHz。
为了分析当前时刻不同位置的定位误差,可以将目标处于不同位置的CRLB进行分析,绘制成等高线图,即定位误差的几何分布。根据GDOP的定义,位置GDOP为:
(18)
可得,TDOA/FDOA联合定位GDOP分布如图 2所示,TDOA定位GDOP分布如图3所示。

图2 TDOA定位误差GDOP图
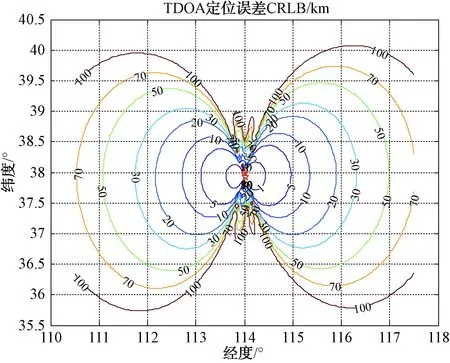
图3 TDOA/FDOA联合定位误差GDOP图
由图 2可知,利用时差频差联合定位的GDOP分布与运动平台的速度相关,在航线的垂直方向联合定位精度最高,而在航线方向定位精度最低,这与时差频差联合定位的可观测性是一致的。对比图 2和图 3可知,在300 km范围内,联合定位误差下界为45 km,时差定位误差下界为70 km;因此,与仅利用时差的定位相比,联合定位的精度更高。
为了分析多运动平台对固定目标连续多次定位的CRLB,将所有时刻的测量信息联合起来作为测量信息。假设TDOA和FDOA的测量数据更新率为1 s一次,则连续多次定位的CRLB如图 4所示。
从图 4中可以看出,随着观测量的累积,联合定位的CRLB和仅测TDOA参数定位的CRLB不断减少,定位精度不断提高。与仅测TDOA参数的连续多次定位相比,TDOA/FDOA联合定位的CRLB曲线下降速度更快,说明在增加了FDOA信息后,定位精度有了较大的提高。FDOA信息可以提高定位精度,最主要原因是FDOA的相对精度较高。根据工程经验,达到这种FDOA测量水平还是可能的。
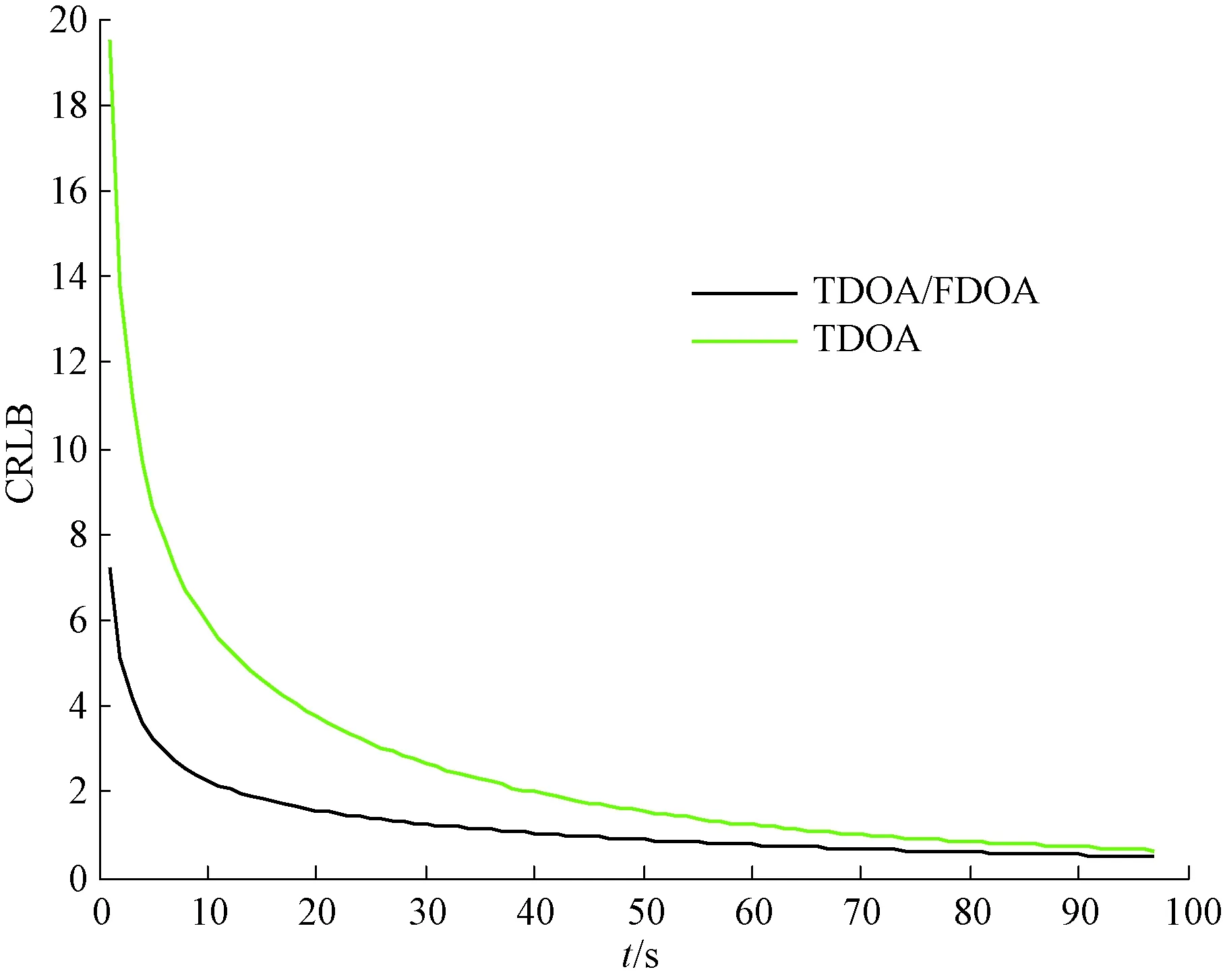
图4 TDOA/FDOA多次定位的CRLB曲线
4 结束语
本文针对多运动平台对地面固定目标定位的精度问题,推导了在地球椭圆方程约束条件下的多次联合定位误差的CRLB,给出了单次定位误差GDOP分布和多次定位的CRLB曲线,描述了运动多平台连续定位的定位精度理论下界。在此基础上,对比了运动多平台仅测时差定位技术,仿真结果表明:
(1) 在相同的定位条件下,通过增加目标的FDOA信息可以有效提高运动平台无源定位系统的定位精度;
(2) 与仅测时差定位系统的误差分布相比,时差频差联合定位系统的定位误差分布与平台的运动速度有关。
本文重点推导了多运动平台对地面固定目标的多次定位CRLB下界,但是对于地面机动目标的定位误差下界还有待进一步推导分析。该联合定位方法可以应用于现有的仅测时差的定位系统以提高定位精度,而不用对现有系统进行较大改动。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2021年4期)2021-08-29
数学大世界(2021年10期)2021-06-05
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
考试周刊(2017年37期)2017-12-27
读与写·教育教学版(2017年10期)2017-11-10
中华家教(2017年2期)2017-03-01
数学学习与研究(2016年18期)2017-01-07