
基于因子分析的倒钟摆模型足底压力分布研究
2019-05-24 06:33林芳富李艳宋武
人类工效学 2019年2期
林芳富,李艳,宋武
(华侨大学工业设计研究院,福建 厦门 361000)
1 引言
人体天生就是一个不稳定的平衡系统[1],研究表明,几乎所有的神经肌肉骨骼疾病都会导致平衡控制系统的一些变性[2],譬如由中风、帕金森、截肢及老龄化等原因引起的摔倒事件,世界卫生组织关于老年人预防摔伤的全球报告中指出年龄在70 岁以上的人中约有32% ~42%的人每年会摔倒一次,跌倒是造成老人疼痛、残疾、丧生和过早死亡的主要原因[3]。对于人体平衡及步态分析的研究中,足底压力分析是最常用的一种方法,准确的数据测量和分析可以直观地反映足底压力的分布情况以及人体的平衡状态。美国的Tekscan Pressure Measurement System、比利时的Footscan 足底压力分布系统等,都是通过采集整个足底所有点的数据并做分析,虽然足底压力的全采集可以获得精确的数据,但是存在成本高、数据量庞大等问题,为了解决此类问题,大量的研究人员在减少采集点、改进压力传感器、优化算法等方面展开探索。
从解剖学角度来看,人脚包含26 个骨骼,33个关节,以及超过100 块的肌肉、肌腱和韧带。可以细分为前足、中足和后足,后足有距骨(或踝骨,Talus)和跟骨(Calcaneus),小腿的胫骨和腓骨与距骨顶端连接形成踝关节;中足的:骰骨(Cuboid)、舟状骨(Navicular)和三个楔形骨(Cuneiform),它们形成了用作减震器的足弓;前脚有五个脚趾和相应的五个跖骨(Metatarsal)部分,趾骨(Phalanx)与跖骨之间被称为跖趾关节(Metatarsophalangeal joints,MTP)[4]。根据足部解剖学特点,结合绝大部分研究的足底压力分区方式,可以将足底细分为13 个区域,在美国Tekscan Pressure Measurement System 的F_Scan Research7. 5软件中,将T4 与T5 合并为同一个区域T45,在需要的情况下,MH 与LH 也可以合并为Heel 一个区域。如图1 所示。
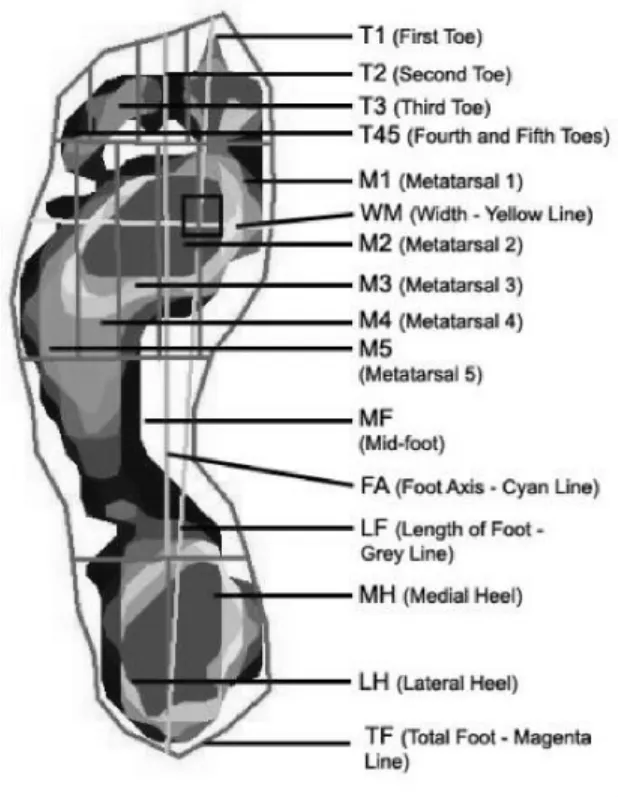
图1 F _Scan Research7.5 的足压分区
11 -13 个区域的分区方式为很多研究提供了采集点选择的依据,相对全采集而言已经减少了很多。但是,足底压力的各个分区是否存在着一定的关系,如何通过数学分析的方式将足底压力的分区进行进一步的归类。而且很多的研究因为需求不同、经验不同、实验条件不同,所选取的足底压力采集点也会有所差异,而其中的差异是如何产生的?本文就此问题对现有相关文献的足底压力采集点的选取进行梳理,并展开相关实验,就采集点差异的产生原因与依据进行论述,为未来进行不同的足底压力采集和分析提供一定的参考。
2 方法
2.1 实验设计
人体在站立时的环节活动被描述为“倒钟摆模型”[5](如图2),这种模型是对人的静态站立时的简化模型,是最基本的人体姿态模型之一,该模型阐述了人体在静态站立时,人体围绕踝关节在失状面内做前后摇摆的状态。本论文基于该模型,采用实验室法,对10 名被试者(女性5名,男性5 名)进行相关实验和数据采集,要求被试者身体健康,半年内无运动损伤史,3 天内无激烈运动,年龄:20 -26 之间,平均身高:170. 1 ±5.3 cm,平均体重:58.3 ±8.4 kg,BMI:20 ±1.7 kg/m2;采用美国Tekscan 公司的F_Scan 鞋垫系统对足底压力变化情况进行实时测定与分析,使用IBM SPSS Statistics Version20 软件对所得数据进行分析处理。
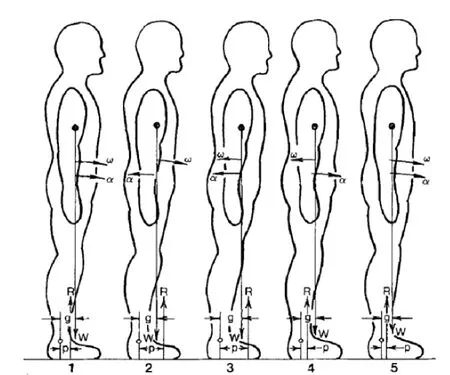
图2 倒钟摆模型:一个被试者在力平台上静止地站立时来回摇摆,五个不同的时间点的重心(g)和压力中心(p)位置以及相关的角加速度(α)和角速度(ω)(图像来源:Winter,D A[1])。
实验过程:将感应鞋垫放入同一型号的标准鞋中,被试者穿好鞋后进入实验区域,休息2 min后,每名被试者需要在制定区域内,抬头挺胸,双手自然下垂,眼睛平视前方,在实验员发出指令后,身体自然前倾,到极限位置后,身体自然后仰至极限位置,再回到静态站立姿态,测试结束,每个被试者测试3 组,每组之间被试者坐下休息1 min。
数据采集:启动F_Scan 设备,打开数据记录软件F_Scan Research 7.5,随着实验的开始,记录整个倒钟摆模型姿态内被试者的足底压力数据。
2.2 足底压力的应用
随着技术的发展,大量新的足底压力检测手段得到应用,足底压力的采集与分析不再是只停留在实验室的仪器,越来越多便携的足压采集可穿戴设备及分析系统被运用到体育运动、医疗诊断、工作生活等方面,Tan A M[6]等人使用力板为医疗和运动方面开发了一款低成本、高分辨率的足底压力测量装置;Harle R[7]等人开发了适用于运动领域的可穿戴式传感器系统,采用廉价的力敏电阻进行足部事件捕捉,两个方形压敏传感器采集了趾区、足跟两部分数据,两个圆形传感器采集第一跖骨与第五跖骨的数据,整个系统轻便可靠,对运动影响极小,如图3 所示。Azevedo[8]等人对足底压力分布的对称性与足球运动员足部受伤的关系的研究中,重点在于对足底压力的不对称性,所以采用拇趾、第一跖骨、第五跖骨、中足、足跟内侧、足跟外侧作为采集点,如图4 所示;Femery V[9]等人在开发足底压力检测设备时,确定了拇趾、第一跖骨、第三跖骨、第五跖骨、足跟内侧、足跟外侧6 个采集点,额外在中足外侧选择一个采集点,形成对足底7 个关键区域的测量,如图5 所示;Satiro M[10]等人使用压力传感器对拇趾、第一跖骨、第三跖骨(前脚掌中部)、第五跖骨(前脚掌外外侧)、中足内侧、中足外侧、足跟的压力进行采集,设计了用于测量日常活动中的足底压力的鞋内装置,如图6 所示。

图3 Harle R(2012)四点足底压力检测
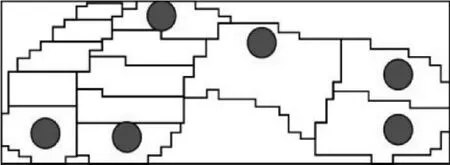
图4 Azevedo R(2017)六点足底压力检测
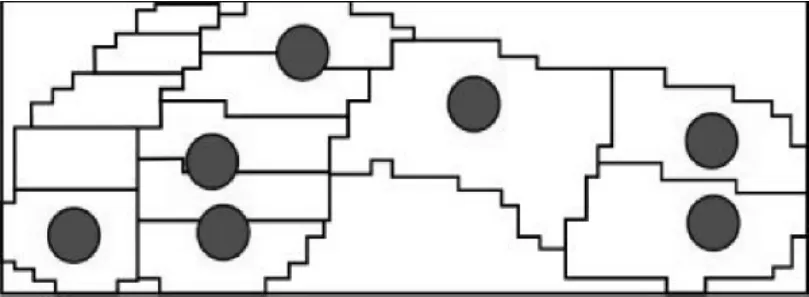
图5 Femey V(2018)七点足底压力检测a

图6 Saito M(2011)七点足底压力检测b
2.3 非精确性足压数据采集
不同的实验要求压力传感器的精度、参数并不相同。Wang Y[11]等人在评估足底症状的严重程度时,采用足与地面的接触频率来进行分析,过程并不要求采集足压具体数据,只要求有足压的信号被采集到就可以计算出整个步态的击打率(Strike Frequency,SF),所以在拇趾、足跟各取一点采集点。在进行步态分析过程中,有些研究并不需要知道切确的压力值,而只需要知道范围值,如图7 所示。Jeong G[12]等人就提出了以8 个4 级压力传感器收集拇趾、小拇指、第一跖骨(2 个)、第五跖骨(2 个)、足跟内侧、足跟外侧压力级别数据结合智能算法进行步态分析,如图8 所示。
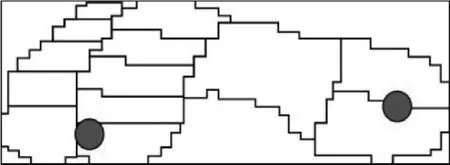
图7 Wang Y(2017)两点足底压力检测
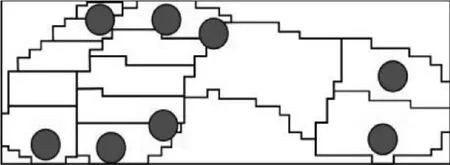
图8 Jeong G(2017)八点足底压力检测
2.4 新技术的应用
随着技术的进步,越来越多的新技术、新方法被应用在在足压测量上,Ghazali A M M[13]等人探讨了在于用精确、低功耗的无线数据传输技术来获得对足压的精确实时测量数据,采集点选择了拇趾、第二趾骨、第四趾骨、足跟,如图9 所示;Otsuka Y[14]等人主要针对的是异质芯光纤传感器在足压测试中的应用研究,采集点定位在拇趾、第一跖骨、第五跖骨、足跟,最后验证了该系统是可以有效地检测出不同的步态的。对于可靠性的论证,在有条件的基础上,大部分研究会使用实验室的仪器来进行二者的对比,以获得论证的依据,Macleof C A[15]等人针对3D 步态分析系统的复杂性和高成本问题,开发和测试了便携式的无线步态评估工具,采集点定位在拇趾、第一跖骨、第五跖骨、足跟,通过与实验室3D Vicon运动分析系统进行比较,验证时空动态参数的有效性。由于传统的压敏电阻(force -sensitive resistors,FSR)的感知面积小,感知范围有限,所以不能充分反映实际的足部压力,采集点如图10所示;Bae J,Papavasileiou I,Choi H,Byl N 等人研究者均采用了Kong K 等人提出的新型气压传感器来测量,该传感器由缠绕硅胶管制成的气囊和气压传感器组成,可以充分反映实际的足压,采集点为拇趾、第一和第二趾指关节、第四和第五趾指关节、足跟[16-20],如图11、12 所示。
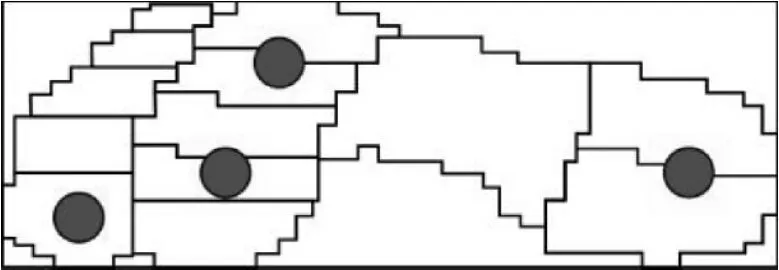
图9 Ghazali A M M(2015)四点足底压力光纤无线检测
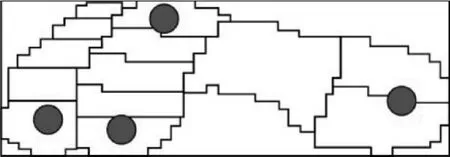
图10 Macleod C A(2014)、Otsuka Y(2015)四点足底压力3D 步态分析系统
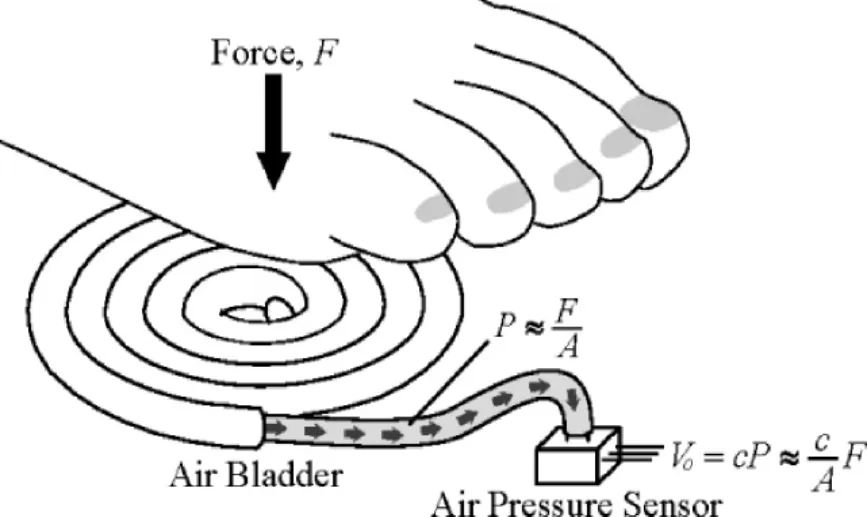
图11 地面作用力(Ground Contact Forces,GCF)测量系统(图像来源:Kong K[20])F:一只脚施加的力量;P:气囊中的气压;A:气囊的横截面积;c:气压传感器的转换常数;V0:气压传感器的电压输出[20]。
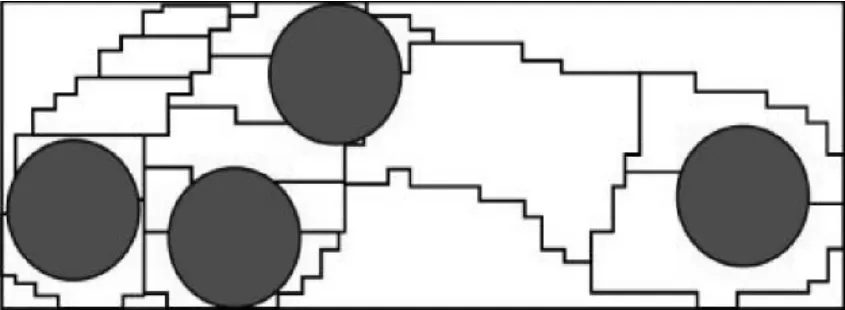
图12 Papavasileiou I(2017)、Choi H(2017)、Byl N(2015)、Bea J(2010)四点足底压力气压传感检测
传统的压力传感器只能获得常量值,而不能获得剪切力等矢量值,Cong Y[21]等人在对高跟鞋的足压分析中,创新性地采用了三轴压力传感器对足底和高跟鞋接触的五个主要承重区域:拇趾、第一跖骨、第二跖骨、第四跖骨、足跟,进行压力与剪切力的同步测量,从而分析高跟鞋对足部局部的应力的影响,如图13 所示。
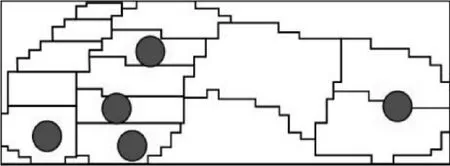
图13 Cong Y(2011)五点足底压力三轴传感检测
2.5 足压数据处理的智能算法
采集点的减少会导致数据的丢失,但是通过智能算法,可以弥补丢失的数据。Bae J[16]等人在使用隐马科夫模型(Hidden Markov Model,HMM)进行步态相位进行分析;Papavasileiou I[17]等人提出基于无限高斯混合模型(IGMM)进行步态相位进行分析。Moufawad EI Achkar[22]等人提出用传感器收集足底8 个区域的压力:趾区(分为拇趾与其余趾2 部分)、跖骨区(分为3 部分)、中足外侧、足跟内侧、足跟内侧,配合加速度传感器,基于生物力学的专家决策树区分运动/非运动、站/坐、上/下楼梯、非等级运动等,该算法的总体准确率为97.41%,如图14 所示;Jeong G[12]等人提出以8 个4 级压力传感器收集压力级别数据,分别用0、1、2、3 来表示足压的压力等级,采用支持向量机算法(SVM)对水平步行、上下楼梯进行分类,可以达到95.2%的识别率。
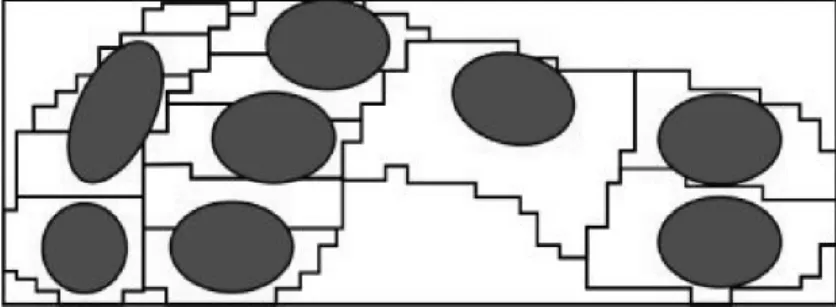
图14 Moufawad EI Achkar(2016)八点足底压力加速度传感检测
3 结果
峰值压力是指测得的最大压力值,代表受到地面的最大反作用力,它反应了各个区域的局部最大受力情况。平均姿态峰值压力(Peak/Stance Averaging)是通过平均一组“峰值”帧来创建的,对每个“峰值”帧的值进行平均,并显示为一个复合的“平均姿态”,它反应了每个压力采集点在整个采集过程中的最大压力值。将每个区域的所有点的平均姿态峰值压力值进行叠加,可以获得每个区域的平均姿态峰值压力值,如图15 所示。

图15 F_Scan Research7.5 的各区域的P/SA 值

表1 KMO 检验和Bartlett 球度检验
因子分析(Factor Analysis)是通过对变量之间关系的研究,找出能综合原始变量的少数几个因子,使得少数因子可以反应原始变量的绝大部分信息,通过对足底压力变量之间关系关系的研究,找出能综合原始变量的少数因子,将多维度的数据进行降维处理,用少数几个不相关的因子代表多个原始变量。使用Kaiser -MeyeR -Olkin检验(简称KMO 检验)和Bartlett 球度检验来判断相关矩阵中的相关性,如表1。

表2 公因子方差
本实验检验的P 值接近0,表明11 个变量之间有较强的相关关系,而KMO 统计量为0.791 >0.7,表明本样本适合做因子分析。
由表2 给出的共同度量表可得,大部分的变量(除了M2)都在70%以上,所以所提取的公因子对原始变量有较强的解释能力。

表3 各因子所解释的原始变量的方差
可以由表3 得,三个因子总共解释了原始方差的79.319%,表明因子分析的结果较为理想。采用Varimax 法得到旋转后的因子载荷矩阵如表4 所示。

矩阵1 2 3 T1 0.284 0.839 -0.063 T2 0.722 0.451 0.138 T3 0.888 0.250 0.034 T45 0.851 0.278 -0.028 M1 -0.118 -0.016 0.883 M2 0.394 0.488 0.462 M3 0.598 0.499 0.500 M4 0.355 0.669 0.562 M5 -0.029 0.795 0.393 MF 0.912 -0.032 -0.015 Heel 0.258 0.839 -0.030

表5 采集点出现部位统计*
4 讨论
4.1 足底压力指标
通过对各论文中的足压点进行统计,可以获得表5,将不同论文的采集点进行标准化处理后,再叠加后得到图16。

图16 采集点分布叠加图
通过统计结果和叠加图可以直观地发现:众多研究中,采集点都集中在拇趾(T1,93.3%)、第一跖骨(M1,66.7%)、第五跖骨(M5,53.3%)、足跟(H,73.3%)四个区域。
倒钟摆模型是人体静态站立过程中的人体围绕踝关节前后摇摆的运动,采用倒钟摆模型可以充分解释静态站立的足底压力数据变化情况。平均姿态峰值压力充分说明了每个点在整个模型过程中的变化范围(最小为0N,最大为峰值压力)。从实验所得的数据可以得到,在人体静态站立——倒钟摆模型中,根据对足底的11 个区域平均姿态峰值压力的分析,可以得知,原来的11 个区域变量,可整理为3 个变量,分别为“足中区”、“极限区”、“跖骨区”,这3 个新变量的数据可以充分地解释整个倒钟摆模型过程中的足压情况,所以在开发新式的足底压力传感器的过程中,应该重点放在这3 个因子所代表的区域:T1、M1 ~M5、MF、Heel。Femery V[9]等人开发足底压力检测设备时,提出通过Footscan 平台上进行赤足测量来确定采集点:T1、M1、M23、M45、MF、MH、LH,虽然没有给出是具体计算方法,但是与本文的结果基本吻合。
4.2 研究的价值与局限性
目前关于足底压力的研究有很多,但是对于采集点的选择方面更多的是基于实验经验,本文运用数理统计的方法为足压采集点的选择进行了定量的分析,为后续的足底压力的相关研究提供新的思路:通过足底压力的数据再分析,探究足底压力各个压力区域之间的内在联系,通过对这种内在联系的分析,一方面对于未来的有关于足底压力的足底压力才几点的选择、特征点提取等提供一种新思路,另一方面对于未来一些有关足压监测的设备的开发提供新思路——通过数据分析,剔除相关性较弱的采集点,用最少的采集点的数量获得最有效的数据,在降低成本的同时获得最高的收益。
但是本文也存在着局限性的:(1)本文只有探讨了静态站立下,矢状面上的倒钟摆模型的足压分析,而日常生活中,人的姿态是动态的、复杂的,动态过程又有周期性的和非周期性的,以周期性步行为例,一个完整的步态周期攘括了支撑相、摇摆相,支撑相又包含了承重阶段(初始触地、开始承重)、单侧支撑(支撑相中期、支撑相末期、摇摆相前期后段),摇摆相可分为摇摆相前期后段、摇摆相早期、摇摆相中期、摇摆相后期,动态过程涉及的数据量相对于静态过程更加繁杂,数据量更加庞大,相关的实验设计需要进一步的改进,实验数据的处理方法也可能需要做出进一步的修改;(2)足底压力分析除了平均姿态峰值压力以外,还有峰值压力、峰值压强、压强-时间积分、冲量、受力面积、压力中心等数据,本文只有探讨了平均姿态峰值压力的情况,而其他的更深入的分析并没有展开;(3)本文采用的是因子分析方法,得到3 个因子,而因子内的各变量之间的关系是通过观测获得,如本文中的第2 个因子,主要解释的是T1 与Heel,在空间上是足部上相距最远的,只能通过经验分析得知T1 和Heel区域是到钟摆过程中前倾和后仰的极限位置,没有进行更加深入的探讨,后续需要在数据处理及算法上进行改进。
5 结论
本论文基于现有的研究来进行梳理,通过总结他人经验进行足底压力采集点的分析,并使用足底压力测试系统,对倒钟摆模型中足压的数据变化情况进行测量;采用因子分析,对足底各个区域进行分析。结果表明:倒钟摆模型的足压变化过程可以分为三个因子,分别为“足中区”(MF)、“极限区”(T1、Heel)、“跖骨区”(M1 ~M5),对比了现有的研究成果,对未来的足压分析提供新的思路。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
包装工程(2022年10期)2022-05-27
骨科(2021年3期)2021-06-05
中国伤残医学(2020年17期)2021-01-11
实用手外科杂志(2020年2期)2020-07-03
养生保健指南(2019年2期)2019-12-16
文萃报·周五版(2019年19期)2019-09-10
科学之谜(2018年4期)2018-09-17
奥秘(2016年11期)2016-12-17
环球时报(2009-04-15)2009-04-15
