
基于CEEMDAN-AF和提升小波的发动机支撑信号去噪研究
2019-06-13 03:12顾中禹崔建峰
自动化与仪表 2019年5期
顾中禹,靳 鸿,崔建峰
(中北大学 电子测试技术国家重点实验室 仪器科学与动态测试教育部重点实验室,太原030051)
发动机支撑是履带式车辆动力舱的关键部件之一,履带式车辆在复杂工况行驶过程中会产生各种振动和冲击,通过压力传感器对其进行测试所得到的发动机支撑信号是一种表现为非线性和非平稳的信号。履带式车辆的动力舱与普通车辆的动力舱相比,有着完全不同的特点:舱内空间狭小,使得可利用的测试空间更加狭小[1];舱内温度较高且分布不均[2],对测试系统电路性能有一定的影响;冲击振动较强,主要来自于发动机自身的周期性冲击振动和路面的不平整引起的随机振动[3];电磁干扰严重,随着履带式车辆的电气化程度越来越高,相应的电磁干扰也越来越来越严重。因此,有效抑制发动机支撑信号的噪声干扰对履带式车辆的评估、改进具有重要意义。
CEEMDAN 算法[4]是在经验模态分解(EMD)[5]和集成经验模态分解(EEMD)[6]的基础上所发展而来的,该算法不需要事先设定基函数,可以把复杂信号分解为一系列不同尺度的固有模态函数IMF(intrinsic mode function), 大大抑制了EMD 中所出现的模态混叠现象,同时与EEMD 相比较而言,分解过程具有完整性和更高的效率[7]。第二代小波也就是提升小波,具有算法简单,效率高等特点[8]。
经实车试验后,在信号采集过程中,由于测试仪器自身精度不足和空间小、温度高、振动冲击大、电磁干扰严重所构成的复杂环境等原因,导致所测试到的信号受到噪声干扰,出现偏差,严重影响发动机支撑受力特性的分析。因此本文提出一种基于CEEMDAN-AF和提升小波的联合去噪方法,能够对发动机支撑压力传感器信号进行良好的去噪处理,同时对比EEMD去噪方法和提升小波去噪方法,该方法在提高信噪比和降低均方根误差方面有明显的优势。
1 压力传感器信号获取电路结构
发动机支撑是履带式车辆的关键部件之一,对发动机支撑应变的获取是通过压力传感器来获得的。如图1所示为实际发动机支撑测试系统示意图, 主要由舱内数据测试单元、 电源供电电缆、光纤、触发信号电缆和舱外数据接收单元构成。其中,舱内数据测试单元包括发动机支撑部件和信号采集存储电路。在实际测试过程中,由于动力舱空间狭小,舱内数据测试单元安装于动力舱支撑处,舱外数据接收单元安装于动力舱外部,两者通过相应的传输电缆进行指令操作和数据同步。测试系统由车体提供电源和触发信号,测试系统收到触发信号后进行数据的采集存储,测试结束后,通过读数盒连接上位机和舱外数据接收单元,进行数据的读取。
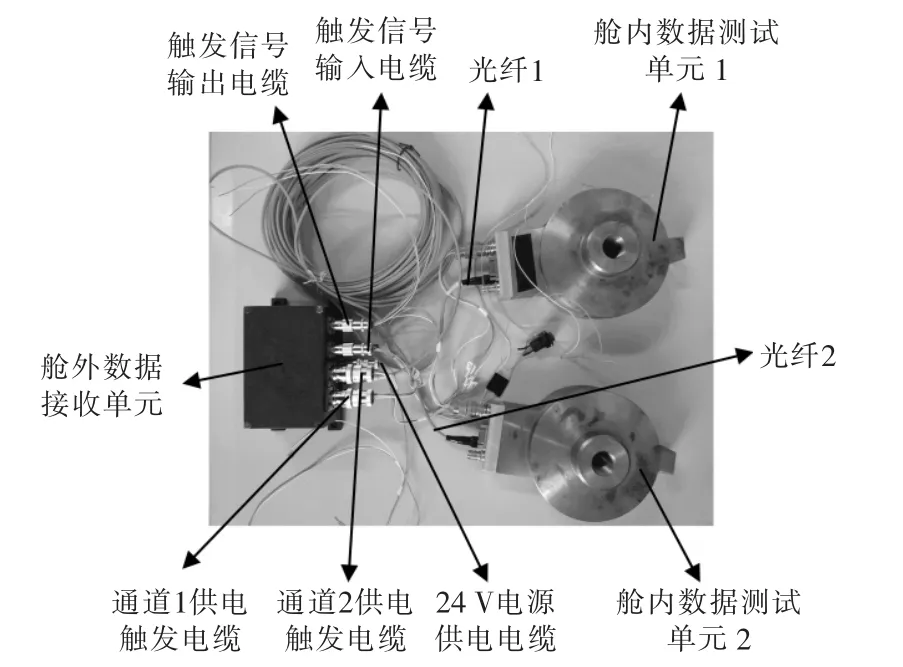
图1 实际测试系统示意Fig.1 Schematic diagram of actual test system
发动机支撑压力传感器信号调理电路结构如图2所示,在车辆行驶过程中,发动机支撑受力转换为压力传感器的输出变化,经过仪表放大、低通滤波、电压跟随和A/D 存储采集后,得到了发动机支撑压力传感器信号。但是由于测试仪器自身精度不足和环境恶劣等问题,导致所采集的信号中掺杂大幅度噪声,甚至有效信号被淹没,因此需要对测得的发动机支撑压力传感器信号进行去噪。
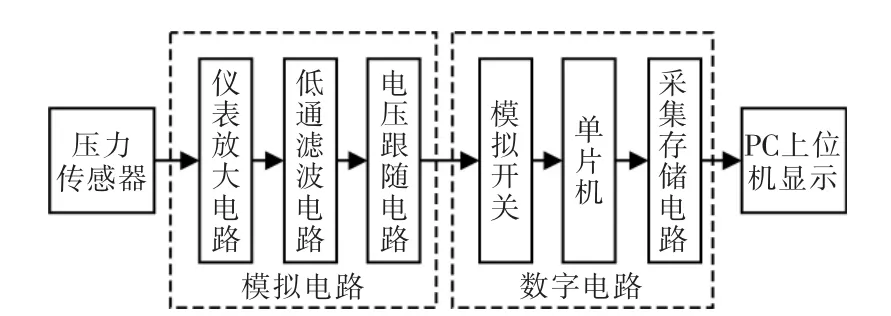
图2 测试系统结构框图Fig.2 Structural block diagram of test system
2 CEEMDAN-AF 和提升小波去噪原理
2.1 CEEMDAN 算法
CEEMDAN 算法是在EMD 算法分解的阶段添加有限次的白噪声,计算唯一的余项。CEEMDAN 的重构误差较小, 同时大大抑制了EMD 算法中的模态混叠现象;相对于EEMD 算法分解,具有分解完整、计算规模小和分解效率高特点。CEEMDAN 算法的具体步骤如下:
步骤1向原始信号s(t)分别多次加入零均值、方差为常数的白噪声序列εni(t)构造出si(t),其中ε 为噪声系数,i=1,2,…,I。对每个si(t)进行EMD分解, 得到i 个IMF 分量, 定义CEEMDAN 的第1个IMF 分量为

步骤2此时得到对应第一个IMF 分量的唯一余项:

步骤3令Ej(·)为经EMD 分解产生的第j个IMF分量的算子,对信号r1(t)+ε1E1(ni(t))进 行EMD 分解,得到CEEMDAN 的第2 个IMF 分量:

步骤4在剩下的阶段(j=2,3,…,J),相应的余项为

步骤5对信号rj(t)+εjEj(ni(t))进行EMD 分解,得到CEEMDAN 的第j+1 个IMF 分量:

步骤6不断执行步骤4 和步骤5, 直到余项的极值点不超过2 个,最终的余项可以表示为

2.2 自相关函数
随机信号的自相关函数是信号在时域特性的一种平均度量,它反映了信号在2 个不同时刻的关联程度,定义为

式中:x(t)为随机信号;t1和t2为2 个不同的时刻。归一化自相关函数表示为

式中:Rx(0)为信号与自身在同一时刻的相关函数值。
对于随机噪声, 由于其各个时刻的随机性,所以其自相关函数只在零点处有最大值,在其他点处它的自相关函数会迅速衰减。对于一般信号,它的自相关函数整体表现出关联性,明显区别于随机噪声。可以根据随机噪声自相关函数的这个特点来对CEEMDAN 分解后的IMF 分量进行噪声主导的分量的进一步筛选。
2.3 提升小波阈值去噪
提升小波变换分解过程由分解、 预测和更新3部分组成。根据信号的奇偶性将原始信号分解为偶信号序列和奇信号序列;根据原始信号的相关性用偶信号序列来预测奇信号序列;更新是为了保持原始数据的完整性来对偶信号序列进行更新。提升小波的重构是分解过程的逆运算。
Donoho 等学者提出了阈值消噪法,常用的为硬阈值和软阈值消噪法。硬阈值函数为

式中:λ 为阈值,ωj,k为信号在第j 层k 处分解的小波系数。在硬阈值的基础上得到软阈值函数为

2.4 本文算法去噪流程
本文提出了一种基于CEEMDAN-AF 和提升小波的联合去噪方法,该方法用于发动机支撑压力传感器信号的去噪,具体过程如下:
(1)对原始信号进行CEEMDAN 分解,得到从高频到低频排序的IMF 分量;
(2)通过自相关函数对得到的IMF 分量进行分析,分辨出噪声主导的IMF 分量;
(3)对噪声主导的IMF 分量进行提升小波变换,提取各尺度的小波系数做软阈值处理,得到新的小波系数并进行重构;
(4)将去噪后的IMF 分量和剩余的分量进行重构,得到最终的去噪信号。
3 有效性验证
本文提出了基于CEEMDAN-AF 和提升小波的联合去噪方法,为了检验算法的去噪效果,本文选取合成信号x(t)=cos(50πt)+sin(70πt)作为原始信号,采样频率取为1024 Hz,选取1 s 的数据。对所选数据分别加入3 dB、5 dB、7 dB、10 dB 和15 dB 的白噪声信号用来对比分析,同时用EEMD 算法和提升小波算法的去噪效果与本文算法的去噪效果进行对比,性能衡量指标选取信噪比SNR 和均方根误差RMSE 来对3 种算法进行去噪效果的评价。
3.1 性能衡量指标
信噪比SNR 计算公式为

式中:s(t)为原始信号;s1(t)为去噪后的信号。
均方根误差RMSE 计算公式为

式中:n 为信号长度。
3.2 仿真实验
图3为加入5 dB 高斯白噪声的原始信号在CEEMDAN 算法下的IMF 分解图, 其中CEEMDAN算法的噪声标准差取值0.2, 噪声加载次数为500,算法最大迭代次数为5000。从图3中可以看出,加噪原始信号(5 dB) 的CEEMDAN 模态分解图包含10 个IMF 分量,接下来通过自相关函数来找出噪声主导的IMF 分量。
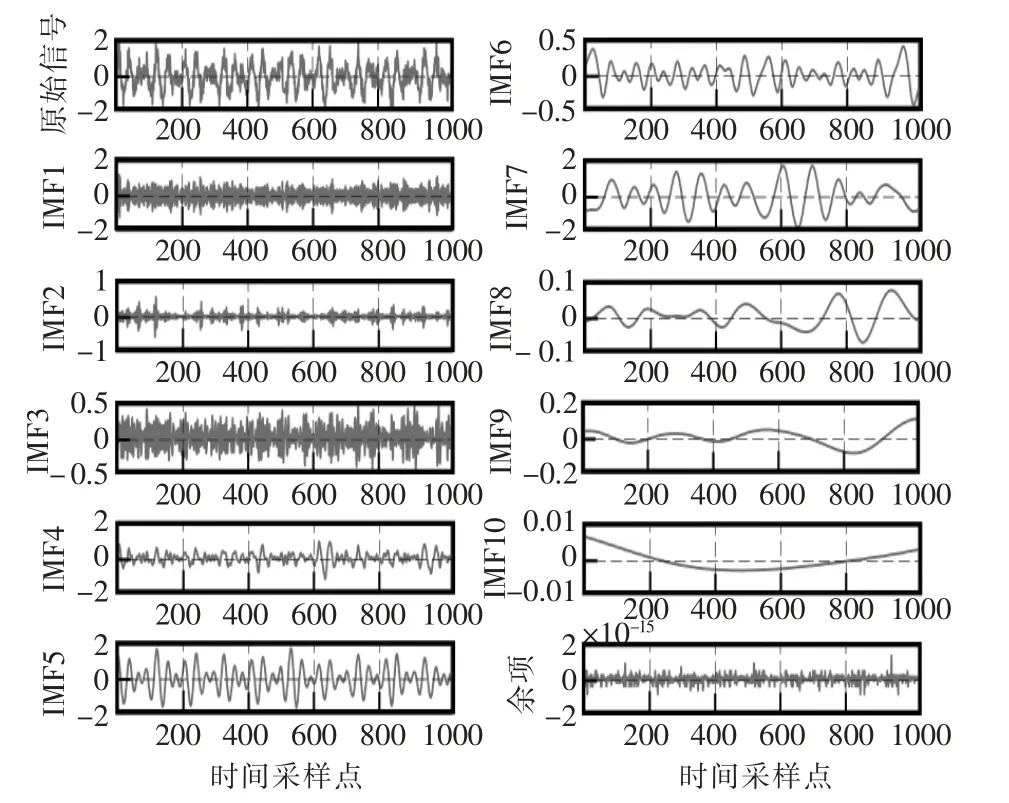
图3 加噪原始信号(5 dB)的CEEMDAN 模态分解图Fig.3 CEEMDAN mode decomposition diagram of noisy original signal(5 dB)

图4 加噪原始信号、白噪声和加噪原始信号CEEMDAN分解的前6 个IMF 的归一化自相关曲线Fig.4 Normalized autocorrelation curves of the first six IMF decomposed by adding noise,white noise and noised original signal CEEMDAN
加噪原始信号经过CEEMDAN 分解后,它的前6 个IMF 分量和所添加的白噪声信号的归一化自相关曲线如图4所示。由图4和随机白噪声的自相关特性可知,加噪原始信号经过CEEMDAN 分解后得到的IMF 分量中,白噪声主要分布在IMF1 和IMF2分量中,IMF3 和IMF4 分量中白噪声信号为主导部分,含有少部分的高频有效信号,因此选取前4 个IMF 分量作为提升小波去噪的对象。
图5分别为EEMD 算法、提升小波算法和本文算法去噪效果对比图,其中提升小波的小波基选取的是db4, 分解层数为3 层, 采用软阈值去噪的方法, 阈值通过Donoho 提出的阈值公式设置。基于EEMD 的去噪方法,首先把加噪原始信号进行分解,然后把第一个IMF 分量舍去[9],把其余的量进行重构,其中噪声标准差取值0.2,噪声加载次数为500。由于篇幅有限,在文中只呈现出5 dB 加噪原始信号的效果对比图。表1为加噪原始信号在不同噪声程度下3 种算法去噪效果性能指标。

图5 加噪原始信号(5 dB)的3 种算法去噪效果对比图Fig.5 Comparison of denoising effect of three algorithms for noisy original signal(5 dB)

表1 原始信号不同噪声强度下3 种去噪方法性能指标数据Tab.1 Performance index data of three denoising methods under different noise intensity of original signal
由图5中的3 种方法去噪效果图可知,相比于EEMD 去噪方法和提升小波去噪方法,CEEMDANAF 和提升小波的联合去噪的效果最好。EEMD 去噪方法只能滤除部分噪声,得到的信号还是包含有较多噪声并且信号不平滑。提升小波去噪方法虽然能够有效地滤除噪声,但是存在部分有效信号明显失真的现象。而CEEMDAN-AF 和提升小波的联合去噪方法不仅能够有效地滤除噪声,而且能够很好地反映出信号的有效特征信息, 同时信号较为光滑。表1为原始信号在不同噪声强度下3 种去噪方法性能指标数据,从信噪比和均方根误差来看,本文算法的去噪效果要明显优于另外两种算法的去噪效果。随着原始信号信噪比的增加,三种算法去噪效果的信噪比逐渐增加, 均方根误差逐渐减弱,但是本文算法的去噪效果仍然优于另外两种算法。
4 实测压力传感器信号去噪分析
从履带式车辆在复杂工况行驶过程中通过压力传感器所采集的大量数据中选取一个工况的数据,仪器的采样频率为3000 Hz,所选取的工况的时间为12 s 左右。图6为实测发动机支撑压力传感器信号在3 种去噪算法下的去噪效果图。其中,3 种去噪算法所选用的参数和仿真实验中一致。

图6 实测发动机支撑压力传感器信号3 种方法去噪效果Fig.6 Denoising effect of three methods for measuring engine support pressure sensor signal
图6(a)为实测发动机支撑信号,包含有大量的噪声,淹没了有效信号。图6(b)~6(d)分别为实测发动机支撑信号在3 种算法下的去噪效果。由图6可以看出,提升小波去噪方法和EEMD 去噪方法只能滤除部分噪声, 仍然存在有效信号被淹没的问题。本文算法去噪效果最好,取得了很好的噪声抑制效果,并且波形比较光滑,可以明显分析出在这段工况中发动机支撑所受到的压力范围在8000 N~12000 N,履带式车辆在启动和停止时对发动机支撑所造成的瞬时冲击压力为4000 N 左右。因此,CEEMDAN_ 自相关函数和提升小波阈值的联合去噪算法适应性好,去噪效果比较优越,可应用于履带式车辆的一类压力传感器信号的去噪分析处理。
5 结语
本文提出了基于CEEMDAN-AF 和提升小波阈值的联合去噪方法,通过自相关函数特性寻找噪声主导的IMF 分量进行提升小波阈值去噪,最后重构得到去噪信号。通过仿真实验,对原始信号分别加入3 dB、5 dB、7 dB、10 dB 和15 dB 的白噪声信号来进行对比分析,同时用EEMD 算法、提升小波阈值算法和本文算法对其进行去噪处理,得到本文算法的去噪效果要远远好于另外2 种去噪方法,在SNR和RMSE 两方面有很大优势,且去噪后的信号较光滑。最后,通过对一个实测工况的压力传感器信号进行3 种方法的去噪对比分析,可以明显看出本文算法去噪效果要明显优于另外2 种算法,解决了有效信号被淹没的问题,极大地方便了后续数据的分析处理。本文算法对于履带式车辆的一类压力传感器信号去噪分析具有一定的意义,对于我国履带式车辆的评估、改进具有重要意义。
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
建材发展导向(2021年19期)2021-12-06
科技风(2021年19期)2021-09-07
临床骨科杂志(2020年1期)2020-12-12
读者·校园版(2020年19期)2020-09-16
电子制作(2019年13期)2020-01-14
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
英美文学研究论丛(2018年1期)2018-08-16
探测与控制学报(2015年4期)2015-12-15
