
旋涡式水面垃圾清理装置及其远程监控系统设计
2019-06-13 03:12傅鹏有张校伟冯美玲
自动化与仪表 2019年5期
傅鹏有,罗 亮,吴 静,张校伟,冯美玲
(西南科技大学 信息工程学院,绵阳621010)
我国在经济高速增长的同时,水环境与水生态问题日益突出,水环境恶化对国民健康生活产生了严重影响和制约。尤其在城市景观湖泊等小型水域的建设和维护过程中,由于水循环不佳,湖泊内的垃圾时常无法排走,不仅影响美观和污染环境还易导致水性生物死亡[1]。因而水面垃圾的清理成为重要的环境治理问题,直接关系着整个生态系统的健康。
小型水域下的水面垃圾清理目前仍然以人工打捞垃圾和大型综合清污船作业为主,前者劳动量大、工作效率低、周期长且具有一定安全隐患;后者结构复杂、体型庞大,在小型水域下行动不便且使用成本过高。为此文献[2-4]设计了自主行驶的小型垃圾收集船,但是制造成本高,运输及其使用较为麻烦。文献[5]创新地提出了一种旋涡式的水面垃圾清理装置,具有良好的创新意义和实用价值,但是尚不能与外网连接,只能本地控制,限制了装置的使用距离。针对以上问题,本文以流体学、单片机控制、互联网技术等作为理论基础,设计了一套适用于小型水域的漩涡式水面垃圾清理装置及其监控系统。该清理装置具有结构简单、使用方便、成本较低且自适应能力强的特点,能够实现全天候打捞水面垃圾工作。同时,与互联网技术结合,建立其云端服务器, 依托Android 移动智能终端实现了对于装置的远程监控。
1 总体设计方案
设计由上位机和下位机构成,上位机由云端服务器和Android 端软件构成, 其架构框图如图1所示。上位机用于垃圾清理装置状态的远程监控管理,判断其垃圾清理装置工作是否正常以及垃圾有无收集满,以便于人工维修和及时清理装置收集的垃圾。下位机为垃圾清理装置,主要由装置结构外体、电源模块、无线通讯模块、传感器检测模块、驱动电路及水泵模块构成, 其整体架构框图如图2所示。
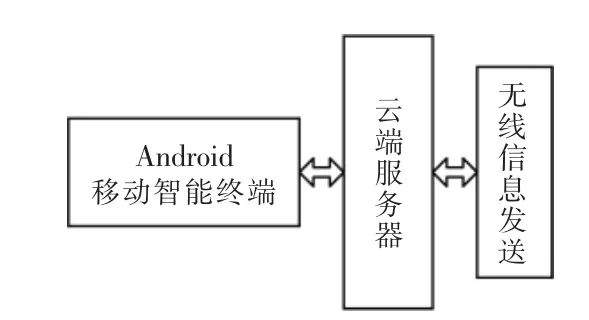
图1 上位机架构框图Fig.1 Architecture diagram of upper-computer
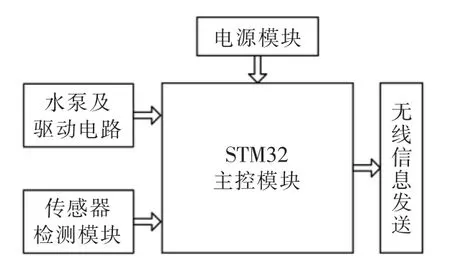
图2 下位机装置架构框图Fig.2 Architecture diagram of lower-device
装置工作悬浮于水体中,其体设有进水口。装置通过液位检测传感器检测当前液位并依此控制潜水泵排水流量,使得舱体内水平面与外界水平面形成固定液位差,由于引力作用,外界水流流入收集舱水流并形成漩涡。漂浮垃圾随水流一同经进水口被吸入舱体内部的垃圾滤网,水体通过滤网后由水泵排出装置外,垃圾留于收集舱内,以此实现垃圾与水体分离。如此反复循环,至收集舱收满后自动上浮停止收集, 并反馈状态信息显示Android 智能终端。
2 清理装置结构及模块设计
2.1 清理装置整体结构设计
装置整体结构如图3所示。装置整体为圆柱形结构,由浮动平台和舱体构成。浮动平台提供装置悬浮所需浮力,舱体由收集舱和主控舱2 个舱体组成。收集舱主要由过滤壳体构成,壳体为网状结构,壳内可套设用于收集过滤垃圾后的垃圾滤网。主控舱内含锂电池、STM32 主控板和无线通讯模块等电子设备。主控舱内整体密封,以一真空管引出各线路,实现同外部外设通信。
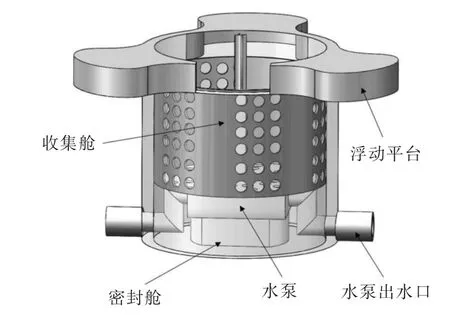
图3 装置整体结构示意图Fig.3 Structure diagram of the device
装置浸入水中部分为对称圆柱体,其整个舱壁所受压力对称,以微积分原理单位化拆分,相互抵消[6]。因此,控制水位差的关键在于控制水泵的排水速度以平衡进水量与出水量。经多次实验,进水口位于水面下3 cm 处较佳, 过高垃圾收集效果不好,过低则进水量过大致使排水量响应增大引起电源电量损耗过快。
装置正常工作时悬浮在水面具有一定水位高度,由于水流不断流入,故由舱体提供的浮力可忽略,主要由密封的主控舱和浮台提供浮力。根据参数计算:装置、浮台、锂电池以及内置控制系统共计8.6 kg。主控舱为长方形结构,其长宽高分别为15 cm,15 cm,8 cm,由阿基米德浮沉定律,浸在液体里物体受到向上的浮力,浮力大小等于物体排开液体所受重力,取水密度为1.0×103kg/m3得:
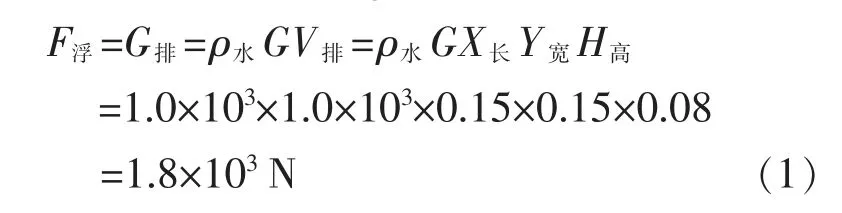
可得,主控舱提供了1.8 kg 的浮力,因而为保证其正常工作时吃水深度,需要浮动平台提供约6.8 kg的浮力。浮台由高密度聚乙烯EPS 泡沫构成,主要分为3 个浮台,固定于收集舱顶部,一方面提供装置所需的浮力,一方面保证清理装置的平衡,防止装置因水浪而倾覆。
2.2 装置控制系统
装置控制系统主要由以电源、主控电路、无线通讯模块、传感器以及附属电路构成,其结构图如图4所示。系统采用STM32F103C8T6 作为控制芯片,STM32F103C8T6 是基于Cortex-M3 架构内核的32 位处理器,拥有有3 路USART 通信接口,4 个16位定时器,每个定时器均可输出4 路PWM 波,能够满足本设计的串口通信需求和对多路PWM 波输出的控制[7]。
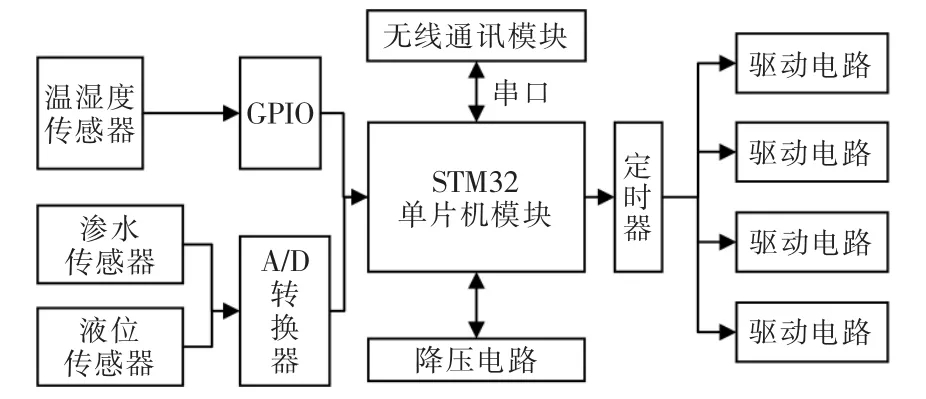
图4 主控系统架构图Fig.4 Architecture diagram of main control system
无线通讯模块采用E35-V 模块,该模块是一款基于GSM/GPRS 网络的嵌入式无线速传模块,采用串口通讯,具有网络覆盖范围广、可靠性高和运行成本低的特点。本设计中, 使用其模块作为MQTT(message queuing telemetry transport)协议支撑,通过MQTT 建立与云端的无线数据通路。
传感器包括渗水传感器、温湿度传感器和液位传感器, 渗水传感器用于检测主控舱是否渗水,温湿度传感器检测舱内环境,液位传感器用于检测装置吃水深度,以此进行抽水速度的调节。
2.3 水泵驱动电路设计
装置由2 个放置位置对称的水泵进行抽排水。水泵均为24 V 无刷直流潜水泵,为实现装置收集垃圾满后自动上浮,2 个水泵满载流量大于其装置并留有一定裕量。同时,为实现对水泵抽排水速度的控制,设计此驱动电路,如图5所示。
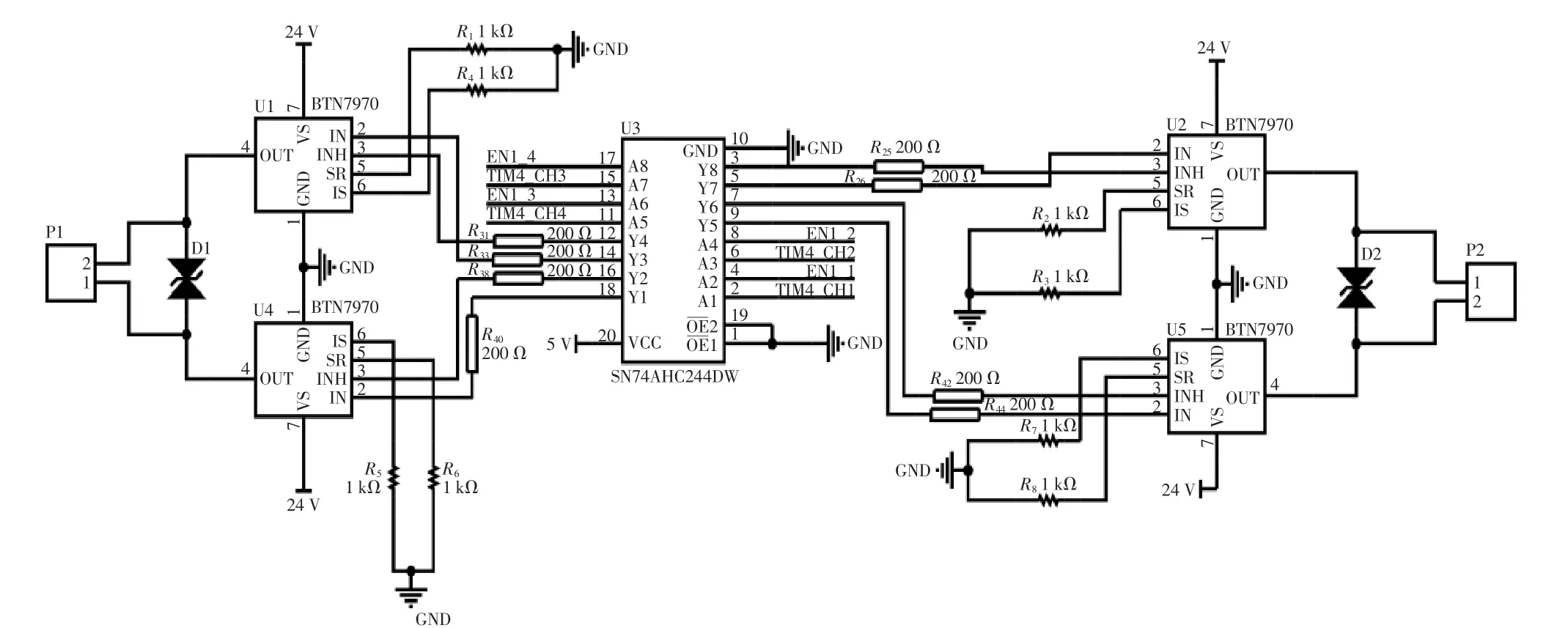
图5 水泵驱动电路图Fig.5 Schematic of the pump driver
设计采用BTN7970 驱动器对水泵进行驱动,BTN7970 是大功率H 半桥集成芯片,驱动信号PWM频率为1~25 kHz,且具有过温、过压、过流和短路保护等诊断功能。为保护控制电路和驱动BTN7970 芯片, 设计采用SN74AHC244DW 高速COMS 同向三态缓冲器分别与水泵驱动器和控制电路相连接。同时,又在2 个水泵驱动芯片间加入双向TVS 管对电路进行保护,免受各种浪涌脉冲的损坏。
3 软件设计
3.1 装置液位控制实现
装置通过液位传感器检测其吃水深度,进而通过PWM 波调节水泵抽水速度, 从而使得抽水速度平衡其进水速度以维持其悬浮。其装置控制工作流程如图6所示。
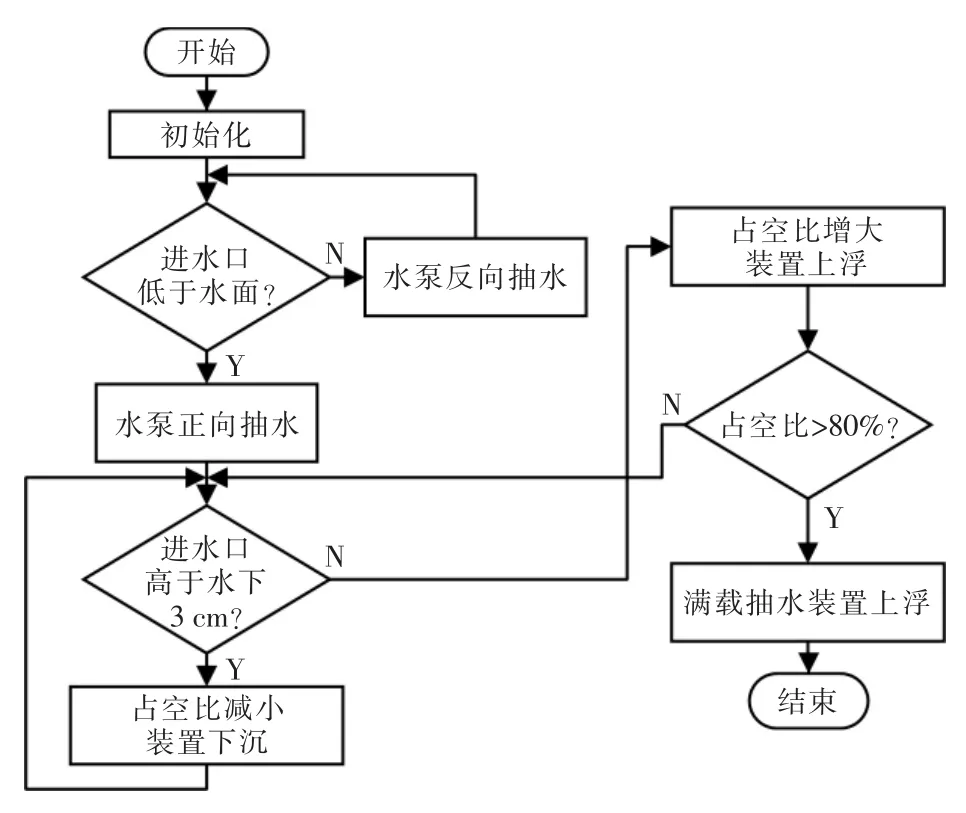
图6 垃圾清理装置控制流程Fig.6 Control flow chart of garbage cleaning device
在装置刚放入水中时,液位传感器此时高于水面,因此,控制水泵反向吸水,使得装置下沉。液位传感器检测进水口到其水面时控制水泵开始工作,并逐步将其装置进水口平稳在水下3 cm 以形成水位差,产生涡流将水和漂浮的垃圾一同卷入垃圾滤网中。伴随装置工作,舱体内垃圾逐步增多,装置因此下沉,此时控制其PWM 波占空比逐步增大,扩大其水泵抽水流量, 重新平衡装置至最佳收集水位。经过多次试验,本设计中以占空比高到百分之八十时,判断其装置收集满,此时水泵满载抽水,抽水量大于入水量,装置上浮,进水口高于水面,并将信息发送,并反馈状态信息显示Android 智能终端。
3.2 通讯实现
清理装置与服务器通讯采用MQTT 协议,MQTT 协议是IBM 开发的即时通讯协议,该协议基于TCP/IP 协议,专为大量计算能力有限,且工作在低带宽的物联网设备开发[8]。MQTT 使用发布/订阅消息模式,订阅者订阅话题,订阅者能接受到所有该话题的信息,发布者发布话题,所有订阅该话题的订阅者均能接后话题信息。本设计中,由于移动终端只对清理装置进行远程监控, 而不进行控制。因此,清理装置与云端为单向通讯链路,服务器只订阅清理装置发布的数据而不自己发布。
服务器与移动终端采用HTTP 建立链接, 为保证其网络传输速度和便于机器解析,服务器与移动终端、清理装置之间均采用JSON(JavaScript?Object Notation,JSON)格式进行通讯,JSON 是一种轻量级的数据交换格式,由名称和值构成。具体数据格式如下:
{ "100001":[
{ "temperature":"24","humidity":"25" },
{ "flood":"0xDD","state":"56"},
]}
10001 为设备ID,由六位整形数构成,不同ID代表不同设备;temperature,humidity 分别代表温度和湿度,值格式为0~100 的小数,其后面值代表当前密封舱内温湿度值;flood 用于表示密封舱内是否进水,0xDD 代表未进水,0xFF 表示进水;state 代表装置垃圾收集进度,值格式为0~100 的整数,由清理装置PWM 波占空比换算得来,100 即为装置以收集满垃圾。
3.3 服务器结构设计
系统服务器主要负责接收垃圾清理装置传送的原始数据报文,并对数据进行处理后将其数据送至动智能终端显示。服务器其可分为处理层和接口层,其功构图如图7所示。
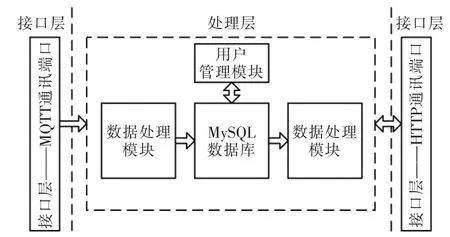
图7 服务器架构图Fig.7 Architecture diagram of server
处理层依托MySQL 关系型数据库,负责实时报文数据的解析、参数运算处理、用户的登录监控、各类数据的存储。接口层负责与硬件端和移动终端建立通讯链路,实现装置远程监控。硬件端与云服务器基于MQTT 协议建立单向通路,移动智能终端基于HTTP 协议与服务器建立双向通讯链路, 智能终端向服务器发起请求时, 相关请求信息直接放在HTTP 请求中, 而当服务器向智能终端返回数据的时候,则通过HTTP 协议返回JSON 格式数据。
3.4 移动智能终端软件设计
考虑其平台的开放性和开发环境的丰富性, 设计采用Android 系统作为支持平台,其移动智能终端软件主要由登录和装置监控界面构成,如图8~图10所示。
用户界面实现用户的登录管理, 而清理装置的监控是终端软件的核心。终端软件提供多装置的同时监控功能, 每个装置具有自己唯一的设备号和密码,终端软件从服务器获取所有设备号和密码匹配成功的装置状态信息并进行显示, 以方便同一水域多清理装置的统一监控。
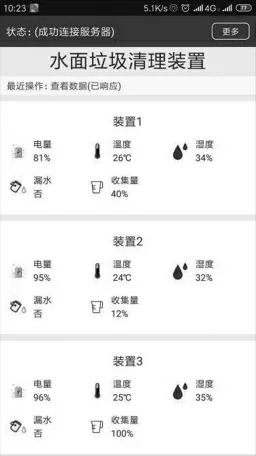
图8 用户登录界面Fig.8 User login interface

图9 装置注册界面Fig.9 Device registration interface
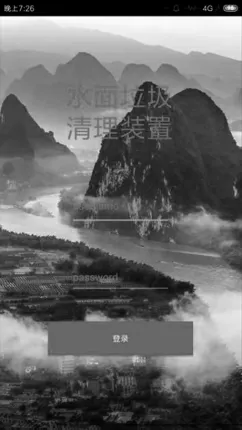
图10 装置监控界面Fig.10 Device monitoring interface
4 结语
本文介绍了一种旋涡式的水面垃圾清理装置及其远程监控系统的设计与实现过程, 细述了装置的结构组成、工作原理和各部分硬件电路设计,给出了远程监控系统设计方案与系统各部分架构。该清理装置成本低,地形适应能力强,适用于小型水域垃圾清理,其远程监控系统使用便捷,能够实现多清理装置的同时在线远程监控。该设计对水面垃圾清理系统的设计与运用具有一定的启发和指导价值。
猜你喜欢
石油工业技术监督(2022年7期)2022-08-18
防爆电机(2022年4期)2022-08-17
防爆电机(2021年6期)2022-01-17
北京航空航天大学学报(2021年9期)2021-11-02
昆钢科技(2021年1期)2021-04-13
现代装饰(2020年8期)2020-08-24
电子制作(2018年23期)2018-12-26
销售与市场·渠道版(2017年2期)2017-03-09
汽车维护与修理(2015年2期)2015-02-28
中国科技纵横(2014年15期)2014-12-11
