小天体探测器着陆附着技术研究
2019-07-08 01:09王立武戈嗣诚蒋万松
航天返回与遥感 2019年3期
王立武 戈嗣诚 蒋万松
小天体探测器着陆附着技术研究
王立武1,2戈嗣诚1,2蒋万松1,2
(1 北京空间机电研究所,北京 100094) (2 中国空间技术研究院航天器无损着陆技术核心专业实验室,北京 100094)
探测器着陆附着技术是小天体探测任务中的关键性技术,关系到任务的成败。文章介绍了美国、欧洲、日本已先期开展的部分小行星、彗星等小天体探测任务,对国内外小天体探测着陆附着技术的研究现状进行了说明。分析了北京空间机电研究所提出的一种用于小行星表面勘测的新概念着陆附着系统,并进行了可控重复附着功能设计和试验,结果表明,新系统能够实现在厘米级粗糙尺度的小行星硬质表面可靠附着。由于新系统的附着模块采用了仿生甲虫爪刺抓附原理设计,其着陆缓冲模块展开折叠比高、着陆稳定性强,研究成果可以为中国小行星探测任务提供技术支撑。
锚定系统 爪刺附着机构 着陆附着 小天体探测
0 引言
小行星探测是当今深空探测的前沿课题之一,可以为太阳系的形成及演化过程提供线索,对研究地球上的生物起源有重要指导意义;其稀缺物质资源可能成为未来开发和利用的宝库。借助科学探测仪器,可以对地外星体进行更全面的探测,最直接有效的探测方式还是着陆附着探测[1-2]。对小行星探测而言,能够揭开太阳系起源和生命演化进程,促进空间科学和技术应用的发展,为深空探测关键技术提供验证。
小行星着陆探测能够对星体开展原位深度探测,并能采集目标样品物质带回地球,作更深入的研究。小行星着陆附着系统用于降低着陆探测器在接触小行星表层过程中的冲击过载,保护所携带设备不受损坏,并将着陆器固定于小行星表面,提供钻探或取样设备所需的附着力或力矩,支撑着陆器进行长期表面探测。
由于各类小行星表层结构特性差异很大,其表层结构可为星尘土壤、碎石或坚硬石块等,并且目前人类对其认识相对有限,因此小行星着陆附着系统需要有较大的适应性。我国发布的2030年前深空探测总体实施方案中将小行星探测列为我国未来深空探测的重点之一,对探测器着陆附着技术提出了新的要求,要求在附着力、附着稳定性和机构可靠性方面取得进一步突破。本文对小天体探测器着陆附着机构开展了设计分析及初步试验验证。
1 小天体探测着陆附着技术研究现状
当前,小行星探测已成为空间探测热点,美国、俄罗斯、欧空局、日本在小行星探测方面均取得了一定成就,欧空局还实现了首次着陆彗星。小行星和彗星的探测研究现状见表1。
表1 小行星和彗星探测研究状况

Tab.1 Reviews on asteroids and comets
美国“近地小行星交会”(NEAR)探测器于2001年2月实现了首次在地外小天体着陆;欧空局“罗塞塔”(Rosetta)探测器的“菲莱”(Philae)着陆器实现了在小天体(彗星)表面着陆和就位探测,并提取表面样本进行分析;日本的“隼鸟”(Hayabusa)探测器在“丝川”(Itokawa)小行星着陆并采集了样品返回地球[3-7]。
1.1 欧空局Rosetta探测器
欧空局的Rosetta探测器具有小行星及彗星表面着陆能力,其主要任务是研究小行星的起源、星际物质的关系以及对太阳系起源。Rosetta探测器由轨道器和着陆器Philae组成,于2004年发射,2014年 11月着陆在“67P/楚留莫夫–格拉西门克”(67P/Churyumov-Gerasimenko)彗星表面[8-11]。
Philae着陆器的着陆系统如图1、图2所示,包括自主降落系统(冷气推进系统)、万向节机构、冰螺栓、支撑架和支撑腿;附着系统包括2个锚定附着子系统。Philae着陆器在与探测器分离后,着陆系统将其3条支撑腿展开至最大包络,同时将连接着陆器基体和着陆支撑架的万向关节松开;锚定附着子系统完成自检[12]。
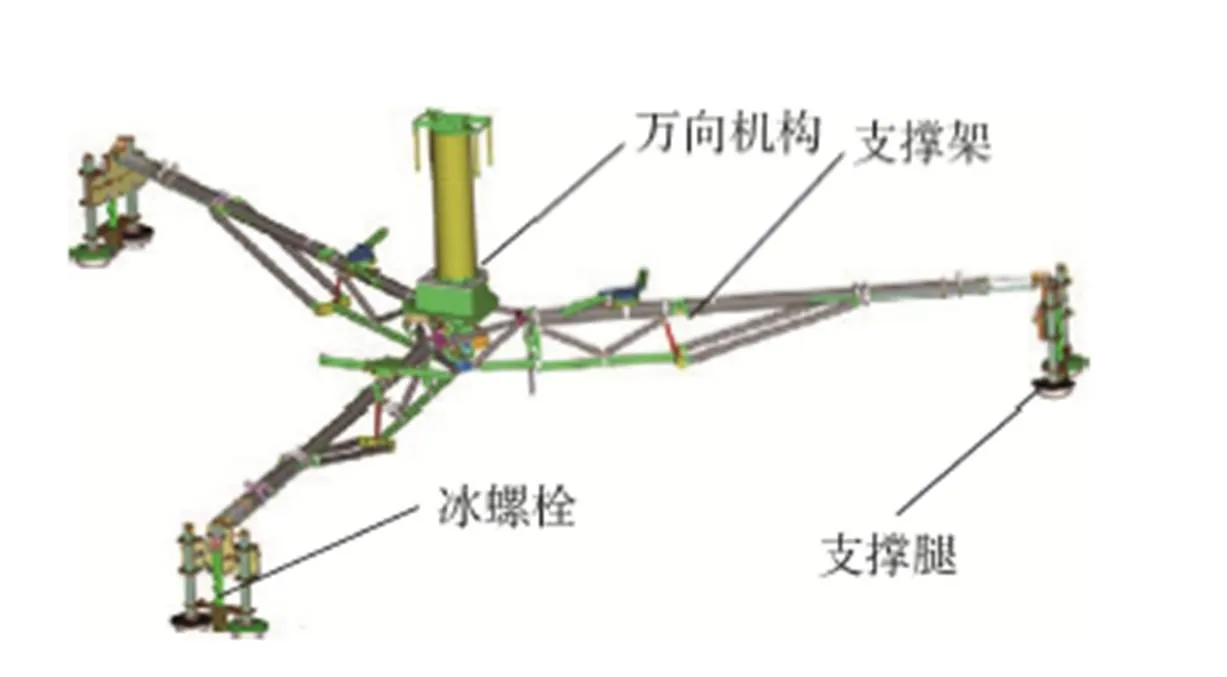
图1 Philae着陆器的着陆系统
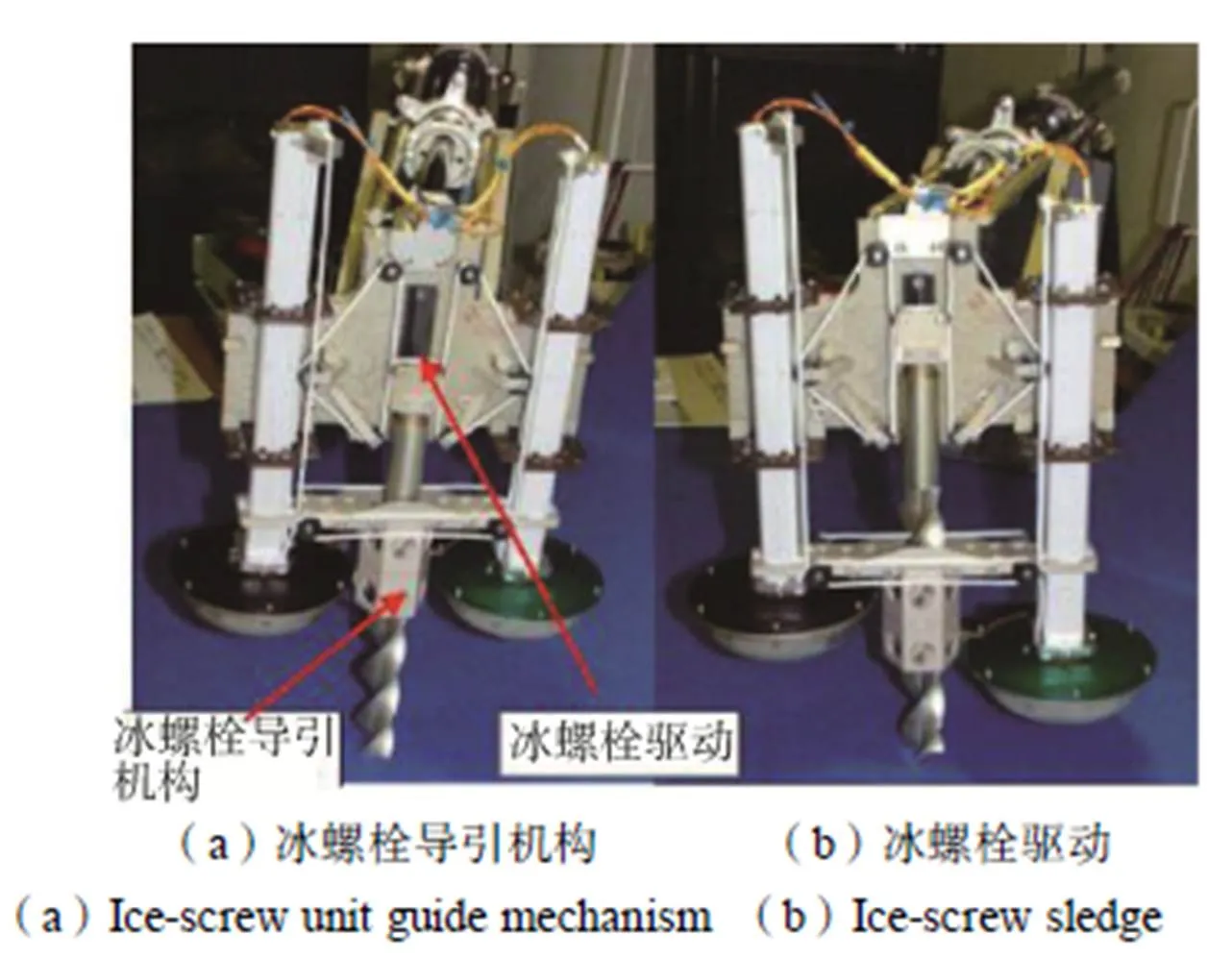
图2 Philae 着陆支撑腿及冰螺栓

图3 Philae着陆器的锚定装置
Philae着陆器主锚定附着子系统如图3所示,它通过火工品将一个带有倒钩的锚叉射入慧星表层,锚叉通过系绳将着陆器与慧星表面固定连接而不飘走。有报道称Philae着陆器的锚定附着子系统出现了故障,并没有牢固附着,而是弹跳了很多次才稳定下来。
1.2 美国小行星多任务探测器
目前美国也正在积极开展载人登陆小行星探测和小行星捕获相关技术研究。针对载人登陆小行星探测任务,研制了多任务空间探测器(MMSEV),并进行了多任务技术验证的水下模拟试验,试验中用到的附着试验条件采用喷气推进和锚定组合方法来模拟,如图4所示。
附着方案的原理是着陆器在接近小行星表面前,先向小行星表面射入多个附着装置,多个附着装置的末端通过绳索连接,形成附着网。着陆器在即将着陆时,通过乘员或机械臂抓取网线,然后收缩连接附着网和着陆器间的缆绳或机械臂,将着陆器拉至小行星表面,期间还可借助于喷气推进装置[13-16]。
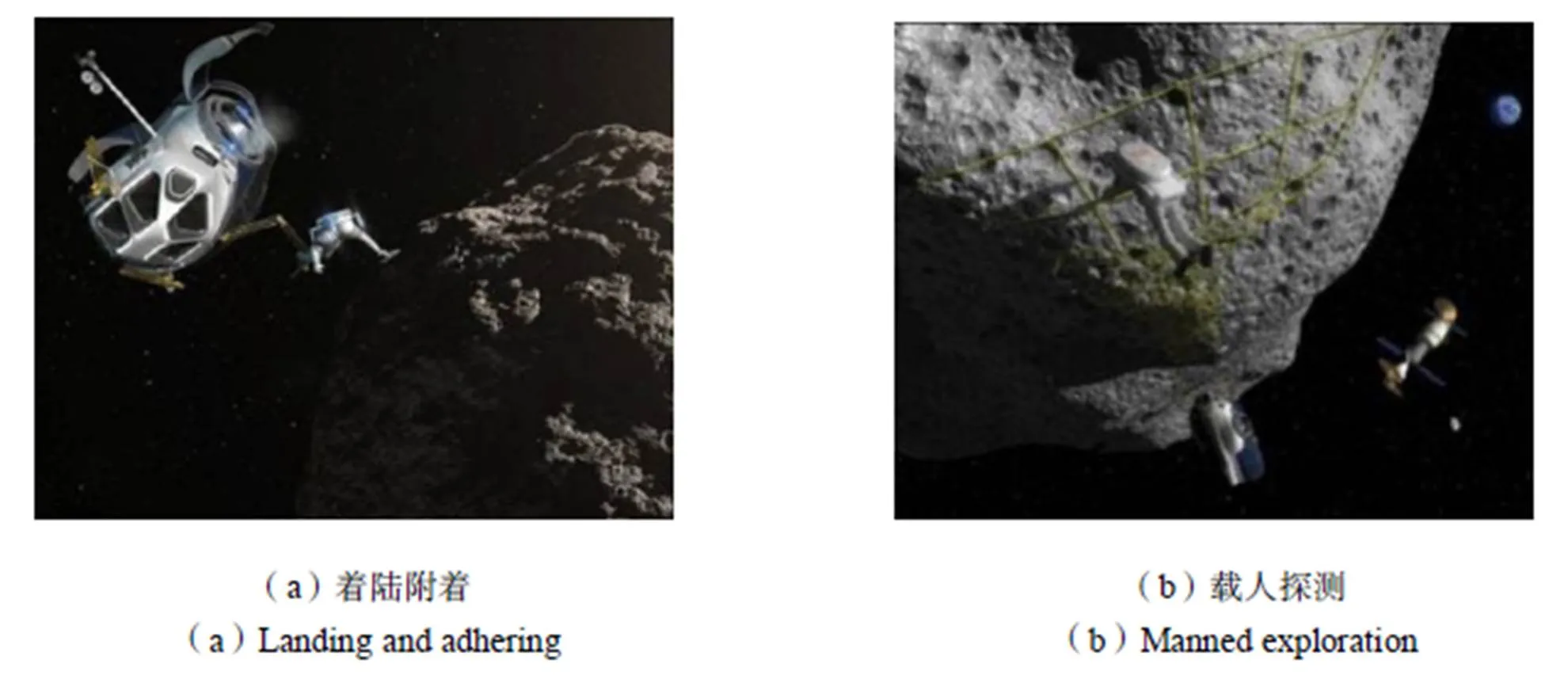
图4 美国载人小行星探测附着方案示意
1.3 日本Hayabusa探测器
日本首个小行星探测及采样返回任务—Hayabusa探测器,于2003年5月9日发射。Hayabusa探测器的主要任务是在小行星Itokawa上着陆,完成样品采集后返回地球。Hayabusa探测器于2005年9月完成在Itokawa小行星上的着陆附着及样品收集,但由于探测器系统的故障,包括姿态控制系统故障、燃料泄漏和电池故障等,使得Hayabusa探测器未按原计划于2007年6月返回地球。后续经过补救措施,使得Hayabusa探测器采样返回舱于2010年6月14日返回地球,成功着陆[17-20]。
探测对象Itokawa小行星,长约700 m,宽约300 m,其引力只有地球的十万分之一。探测器上携带了由可展开机械臂、样品捕获器和投射器组成的取样装置,取样时由可展开机械臂将样品捕获器和投射器放在小行星表面,投射器射出一个高速子弹撞击小行星表面,一个外形为喇叭状的取样装置将这些溅起物质收集并进行密封,紧接着样品捕获器内的样品容器由可展开机械臂送入直径40厘米的返回舱,然后探测器起飞离开小行星返回地球。
1.4 国内研究现状
国内某高校研制了与菲莱的相似的着陆锚定附着系统,其中锚定附着子系统的整体结构如图5所示。此系统集成化程度较高,不足之处在于体积较大,锚体无结构变形,无法增加额外附着力,尖部倒刺对材料要求极高,会对侵彻性能造成不利影响。
此外,北京空间机电研究所基于航天器回收着陆技术开展了小行星着陆附着技术研究,取得了一定的成果。

图5 锚定附着系统结构示意
2 着陆附着技术研究
北京空间机电研究所在航天器回收着陆技术领域一直处于国内领先地位,在小天体探测器着陆附着技术方面也开展了预先研究。研究中以C和S类(大类划分)小行星着陆附着任务为目标,开展了小行星着陆附着系统设计。系统由锚定附着子系统、着陆支撑子系统、爪刺附着子系统和控制子系统组成,其展开和收拢状态如图6所示。
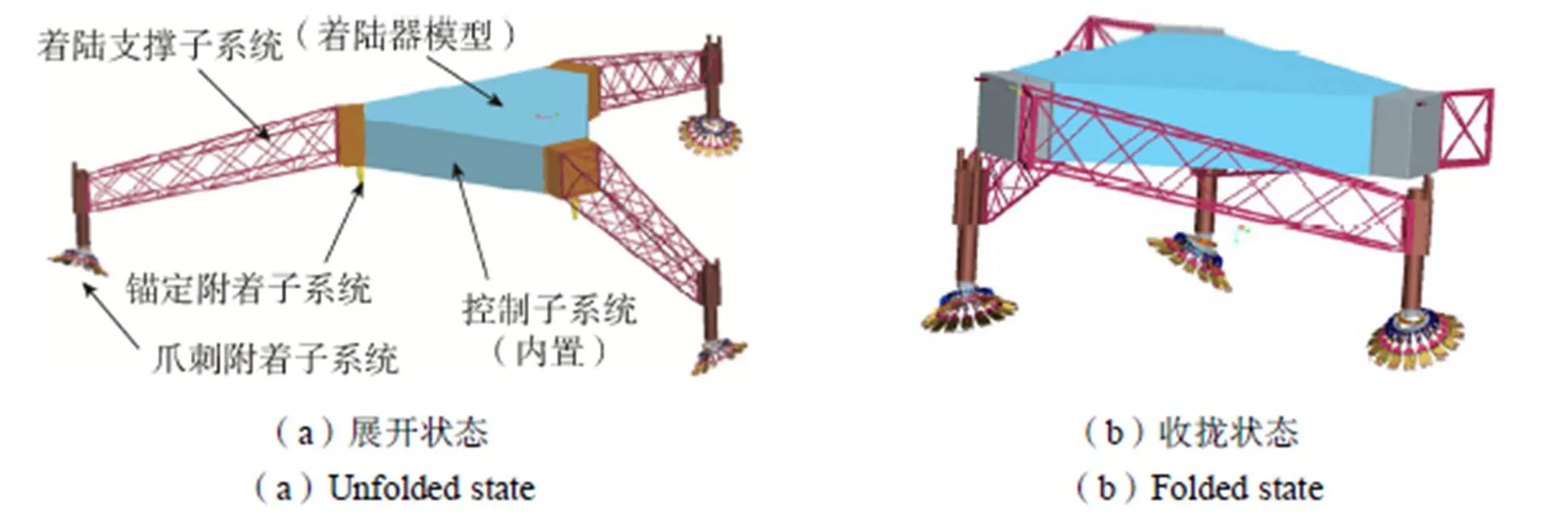
图6 着陆附着系组成及布局示意
2.1 锚定附着子系统
锚定附着子系统用于将小行星着陆器固定在小行星表面上,其外形及主要组成如图7所示。该方案主要由火工弹射器、锚装置、延时作动器、绕线电机和装置结构等5部分组成。锚定附着子系统采用物理破坏表层结构的方式,实现软和较软小行星表层结构的附着,防止小行星着陆器着陆后反弹飘走,并为钻探和取样等科学探测载荷提供所需要的附着力或力矩。
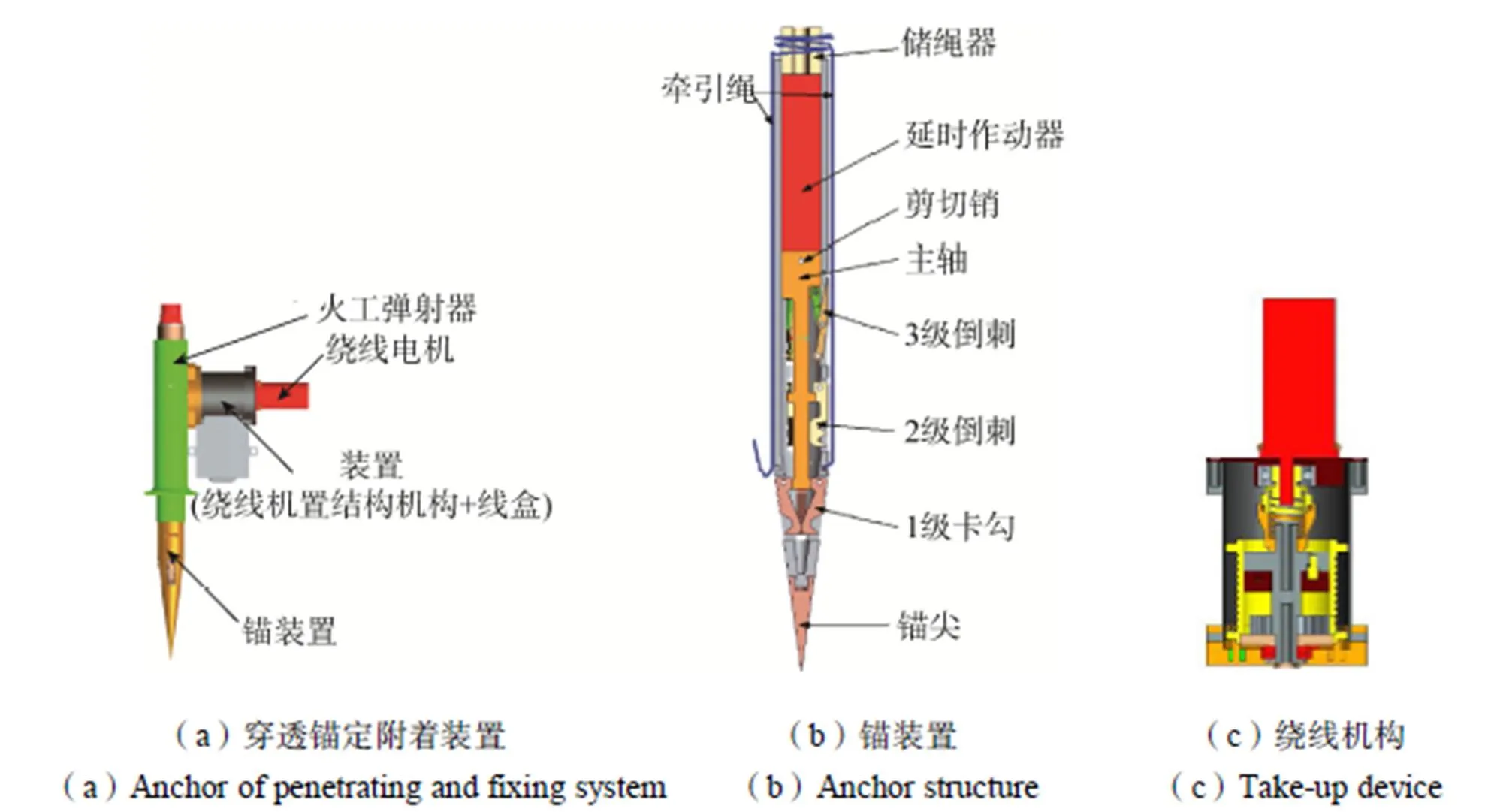
图7 锚定附着装置示意
锚装置通过火工弹射器获得一定初速,射向小行星表层;锚装置射出时将连接与锚装置和装置结构卷筒的绳索拉出;当锚装置射入小行星表面并停止运动后,锚装置内部延时起爆的火工品将增加附着力的机构展开;绕线电机带动绕线机构将绳索拉回直到张紧,从而实现着陆器在小行星表面的有效固定。锚定附着力要求大于60N。
为了分析锚装置侵彻附着性能,掌握侵彻类过程仿真分析方法,利用LS-dyna软件进行了入射运动过程的仿真分析。锚装置简化圆柱体,整个模型去四分之一,建立直径=15mm,长度=43mm的圆柱形锚体,材料为钢,以100m/s的速度入射侵彻混凝土靶板,混凝土靶板尺寸为150mm×150mm×600mm,边界固定。
仿真结果如图8、图9所示。仿真分析有效的提取锚装置的侵入速度、位移及过程中的应力情况,随着时间的增加,锚定装置钻地深度逐渐增大。后续可对不同材料、不同形状锚装置、靶板材料、不同侵入速度、不同侵入角度、不同材料组合靶板(表面覆盖土壤,内部为岩石)进行入射侵彻性能仿真分析。

图8 锚装置侵彻过程仿真结果

图9 锚装置侵彻过程运动曲线

图10 着陆缓冲器方案构型
2.2 着陆支撑子系统
着陆支撑子系统用于着陆附着系统工作前与着陆器本体的折叠固定安装、工作前的释放展开锁定、着陆附着过程中的缓冲吸能和着陆附着过程稳定支撑。子系统分为展开锁定机构、悬臂结构、着陆缓冲器和火工解锁器4个单机。着陆缓冲器的基本原理是弹簧–推杆机构,由缓冲弹簧(2根)、内筒、外壳和棘爪等部分组成,方案构型如图10所示。
2.3 爪刺附着子系统
爪刺附着机构用于辅助将小行星着陆器附着在小行星表面上。爪刺附着机构采用非物理破坏表层结构的方式,实现对硬质小行星表层结构的附着,防止小行星着陆器着陆后反弹飘走,并为钻探和取样等科学探测载荷提供所需要的附着力或力矩。
纯机械式爪刺附着机构由框架、万向机构、爪刺阵列等部分组成,圆周阵列布局,框架是爪刺阵列的安装基础,陀螺式万向机构使得爪刺附着子系统能够适应附着点方位,并在与着陆支撑机构连接位置设计了减振组建,用于降低着陆后反弹冲击,防止爪刺脱附。爪刺阵列用于提供表面抓附力。爪刺阵列设计为6刺/组×16组,如图11所示。根据小行星探测器辅助附着需要,要求爪刺附着力不小于30N。

图11 爪刺附着机构和爪刺单元
2.4 控制子系统
小行星着陆附着系统工作控制程序如下:当着陆器脱离主探测器,控制子系统加电启动。经延时一定时间后,发出展开锁定机构解锁信号,将着陆支撑子系统3个火工解锁器启动,使着陆支撑子系统展开至最大包络并锁定。
在着陆器着陆过程中,安装于着陆支撑腿上的三个触地敏感器在各支撑腿产生实际缓冲行程时发出触地信号,控制子系统根据触地敏感器的组合状态,按照预定逻辑判断决策向哪一组火工弹射器发送启动指令,从而将锚装置射出,延时0.5s后,控制子系统驱动绕线电机和卷筒转动,将连于锚装置和着陆器之间的绳索张紧并锁定,最后系统断电保持锚定附着状态,使着陆器牢固地锚定在星体表面。
当爪刺附着子系统触地达到一定压力,爪刺附着机构自动收缩抓附,在控制子系统接收到触地敏感器信号后延时一段时间,由控制子系统驱动复位舵机对爪刺附着机构进行复位,然后舵机再完成自复位。
3 着陆附着机构试验
小行星着陆探测器的着陆附着过程复杂,应通过地面模拟试验,验证着陆附着系统在微重力环境下对不同着陆地形和地质着陆附着的有效性。现阶段主要试验项目有锚定附着试验和爪刺附着试验。
3.1 锚定附着试验
对锚定附着子系统5个单机进行综合试验。试验时,将产品可靠连接在一个与地面固定的安装架上,如图12所示。在锚定附着子系统的正下方放置多种不同硬度的表层结构模拟件。锚定试验时需给产品加电,可由控制子系统完成。试验获取锚定附着子系统的锚定附着过程影像,测量锚装置的射入速度、锚定后绕线机构运动控制响应情况、绳索张紧力、锚定深度和锚定附着力值等参数。

图12 锚定附着试验示意
试验结果表明,锚定附着装置对于沙土地的附着力达到93N,对于火山石的附着力达到150N,大于60N的附着力要求。
3.2 爪刺附着试验
爪刺附着试验是爪刺附着子系统的专项功能试验。试验过程中,用具有厘米粗糙尺度的大块火山石(直径大于40cm)模拟硬质小行星表面地质结构和地形表面环境,进行爪刺附着子系统的附着过程试验。
试验获取爪刺附着子系统的附着过程影像,统计附着后的爪刺附着率,测量附着力值。控制子系统参与附着后爪刺的脱附和复位,并获取复位过程影像,见图13。

图13 爪刺附着试验及结果
试验结果表明,爪刺附着子系统对于火山石的附着力达到66.8N,大于30N的附着力要求。
4 结束语
本文以小天体深度探测任务为背景,开展了探测器着陆附着技术研究。
研究中基于小天体着陆器着陆过程中侵彻与附着理论设计了锚定附着子系统和爪刺附着子系统,并通过LS-DYNA有限元仿真分析了多种因素对侵彻与附着过程的影响,为附着系统提供了设计依据;同时研制了一种应用于空间环境下的锚定附着及爪刺附着原理样机,并开展了原理样机侵彻与附着性能试验,初步验证了着陆附着机构技术指标。研究表明,爪刺附着装置采用了仿生甲虫抓附技术,适用于在厘米级粗糙度的硬质小行星表面的附着,并且具有非常好的空间环境适应性,有望成为移动式多目标表面勘测的可行技术途径之一。
未来微重力小天体表面探测系统需要能适应复杂的表面地质条件,同时还要能实现多地点多目标移动探测,具备就位探测能力。微重力天体表面巡视机构系统必须集成多种可重复附着技术、灵巧移动机构技术、视觉与光学测量技术、智能协同控制技术,具备着陆缓冲功能,能够实现在微重力天体表面环境和地质地形不确定条件下可靠附着和漫游巡视,支撑微重力天体表面多目标探测任务实施,为钻探或取样等科学设备载荷提供工作所需附着力和力矩等工作条件[21-25]。本文的研究成果可以为我国小天体探测任务提供技术支撑。
[1] DESAI P N, CHEATWOOD F M.Entry Dispersion Analysis for the Genesis Sample Return Capsule[J]. Journal of Spacecraft and Rockets, 2001, 38(3): 345-350.
[2] SANCHEZ J P, MCLNNES C R. Assessment on the Feasibility of Future Shepherding of Asteroid Resources[J]. Acta Astronautics, 73(2012): 49-66.
[3] FARQUHAR R W, DUNHAM D W, MCADAMS J V. NEAR Mission Overview and Trajectory Design[J]. Journal of the Astronautical Sciences, 1995, 43(4): 353-371.
[4] VEVERKA J, FARQUHAR B, ROBINSON M, et al. The Landing of the NEAR-shoemaker Spacecraft on Asteroid 433 Eros[J]. Nature, 2001, 413(6854): 390-393.
[5] NELSON R, WHITTENBURG K, HOLDRIDGE M. 433 Eros Landing Development of NEAR Shoemaker’s Controlled Descent Sequence [C]// 15th Annual AIAA/USU Conference on Small Satellites, Los Angeles, SSC 01-11, 2001.
[6] ACCOMAZZO A, FERRI P. Rosetta Visits Asteroid (21) Lutetia[C]// 61st International Astronautical Congress, City of Light, CZ France, 2006: 17.
[7] FERRI P. Mission Operations for the New Rosetta[J]. Acta Astronautica, 2006, 58(2): 105-111.
[8] ULAMEC S, ESPINASSE S, FEUERBACHER B, et al. Rosetta Lander-philae: Implications of an Alternative Mission[J]. Acta Astronautica, 2006, 58(8): 435-441.
[9] AARON P, MATTHEW F. Microgravity Coring: A Self-contained Anchor and Drill for Consolidated Rock[C]// IEEE AC, Shanghai, 2011, 1335: 1-7.
[10] MURPHY M P, KUTE C, MENGUQ Y, et al. Waalbot II: Adhesion Recovery and Improved Performance of a Climbing Robot Using Fibrillar Adhesives[J]. The International Journal of Robotics Research, 2011, 30(1): 118-133.
[11] ALAN T A. Designing Compliant Spine Mechanisms for Climbing[J]. Journal of Mechanisms and Robotics, 2012(4): 031007.1-031007.8.
[12] SIPILA S A, SCOVILLE Z C, BOWIE J T, et al. Extravehicular Activity Asteroid Exploration and Sample Collection Capability [C]//13th International Conference on Space Operations, Pasadena, California, 2014: 1-11.
[13] RICHARD G W, ROBERT A M, JAMES N M. Low Density Aerodynamics of the Stardust Sample Return Capslue: AIAA 97-2510[R]. Washington DC: AIAA, 1997.
[14] PRASUN N D, DAN T. LYONS, et al. Entry, Descent and Landing Operations Analysis for the Stardust Re-entry Capsule[J]. Journal of Spacecragt and Rockets, 2008, 45(6): 1262-1268.
[15] MITCHEHREE R A, WILMOTH R G, Cheatwood F M. Aerodynamic of Stardust Sample Return Capsule: AIAA 97-2304[R]. Washington D C: AIAA, 1997.
[16] GUILLAUME R, FRANCI N. Thermal Evolution of Pluto and Implications for Surface Tectonics and a Subsurface Ocean[J]. Icarus, 2010, 216: 426-439.
[17] YANO H, KUBOTA T, MIYAMOTO H, et al. Touchdown of the Hayabusa Spacecraft at the Muses Sea on Itokawa[J]. Science, 2006, 312(5778): 1350-1353.
[18] TSUDA Y, YOSHIKAWA M, ABE M, et al. System Design of the Hayabusa 2-Asleroid Sample Return Mission to 1999 ju3[J]. Acta Astronautica, 2013, 9l: 356-362.
[19] FUJIWARA A, MUKAI T, KAWAGUCHI J, et al. Sample Return Mission to NEA: MUSES-C[J]. Advances in Space Research, 2000, 25(2): 231-238.
[20] KAZUHISA F, YOSHIFUMI I, KOIYU H. Assessment of Dynamic Stability of Muses—C Capsule in Hypersonic Rarefied Regime: AIAA 2003-3893[R]. Washington D C: AIAA, 2003.
[21] BLANC M, ALIBERT Y, ANDRE N. LAPLACE: A Mission to Europa and the Jupiter System for ESA’s Cosmic Vision Programme[J]. Exp Astronaut, 2009, 23: 849-892.
[22] SCHEERES D J, HARTZELL C M, SANCHEZ P, et al. Scaling Forces to Asteroid Surfaces: The Role of Cohesion[J]. Icarus, 2010, 210: 968-984.
[23] MICHIKAMI T, NAKAMURA A M, HIRATA N. The Shape Distribution of Boulders on Asteroid 25143 Itokawa: Comparison with Fragments from Impact Experiments[J]. Icarus, 2010, 207: 277-284.
[24] MILANI A, KNEZEVIC Z, NOVAKOVIC B. Dynamics of the Hungaria Asteroids[J]. Icarus, 2010, 207: 769-794.
[25] BENNER L A M, OSTRO S J, MAGRI C. Near-Earth Asteroid Surface Roughness Depends on Compositional Class[J]. Icarus, 2008, 198: 294-304.
Research on Lander Adhering and Recovery Technology for Asteroid Exploration
WANG Liwu1,2GE Sicheng1,2JIANG Wansong1,2
(1 Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China) (2 Key Laboratory for Nondestructive Spacecraft Landing Technology of CAST, Beijing 100094, China)
Landing adhering technologies is an important technology in asteroid exploration mission. Firstly, this paper summarized the current research of small planet explorations of landing adhering and reentry vehicles recovery in United States, Europe and Japan, and then analyzed the technology requirements for our exploration mission. The anchor system for asteroid surface exploration not only can unfold largely than initial state, but also has an excellent stability. Furthermore a bionics micro-pawl mechanism is designed, which can adhere on centimeter-size roughness surface of asteroid reliably. Finally research work on anchor system under microgravity environment technology are presented, which can support our asteroid exploration mission.
anchor system; micro pierce mechanism; lander adhesion; asteroid exploration
V476
A
1009-8518(2019)03-0014-10
10.3969/j.issn.1009-8518.2019.03.003
王立武,男,1978年生,2013年获西北工业大学大学航空工程专业硕士学位,高级工程师。研究方向为航天器回收与着陆技术。E-mai:wangliwujinjin@126.com。
2019-01-18
(编辑:陈艳霞)
猜你喜欢
廉政瞭望·下半月(2022年4期)2022-05-12
北华大学学报(自然科学版)(2021年3期)2021-07-13
今日农业(2021年2期)2021-03-19
航天器工程(2019年4期)2019-11-11
集装箱化(2019年7期)2019-10-18
山东工业技术(2019年10期)2019-05-30
伙伴(2019年12期)2019-01-17
科技创新与应用(2018年1期)2018-01-19
中小企业管理与科技·下旬刊(2016年12期)2017-01-17
太空探索(2016年12期)2016-07-18