双源无轨电车智能型集电器设计及应用
2019-07-12 08:43北京公交保修分公司电车保修厂李建顺
城市公共交通 2019年5期
北京公交保修分公司电车保修厂 李建顺
天津市松正电动汽车技术股份有限公司 杨凱新
1 双源无轨电车集电器概述
1.1 集电器功能
集电器是双源无轨电车从架空线网上获得电能的装置,采用滑动接触的方式从线网上取电,安装在车辆顶部。为了进一步提升双源无轨电车行驶时的机动性,获得较大的偏线距离,双源无轨电车采用杆式集电器。每一辆车装配两根杆式集电器,车辆取电时分别与架空线网上的正负线滑动接触。由于集电器是双源无轨电车从架空线网上取电的特殊装置,因此其在性能上有着特殊的要求,主要包括:绝缘性能、集电头触线压力、集电头最大高度、偏线距离和自动升降杆功能。
绝缘性能是车辆安全使用的基本要求,由于集电器整体暴露在车顶部位,通常要求其具备三级绝缘性能,以保证车辆的安全使用。其他四个方面是保证集电器可靠工作的性能要求,集电头对线网触线的压力过大会加重线网磨损,压力过小易造成脱线或滑块与触线导电不良;集电头最大高度可确保集电器处于自由状态时不影响周边;偏线距离可提高车辆的机动性能,车辆在实际运行中的偏线距离与车速有关,随车速的增大而减小;自动升降杆功能是为了提高双源无轨电车的机动性能和运行效率。
1.2 结构及工作原理
双源无轨电车集电器主要由集电头、集电杆、集电座、绳箱或拉绳和升降杆装置等构成,集电器的构造如图1所示。
集电头是集电器与线网触线的接触部分,采用滑靴式球型关节结构,可在水平方向任意转动,在垂直方向上可做仰、俯角度变换(各为20°),头部由两块夹板(靴帮)构成,便于更换滑块。集电头与集电杆的连接处必须采用绝缘材料连接,既可作为一级绝缘,又起到对线网的保护作用,同时要求集电头安装有护壳防刮线。
集电杆早期是由无缝钢管制成,上端渐细,以减小自重和摆动惯性,连接集电头的高压导线自集电杆内穿过,集电杆上半段包有绝缘防护层,防止集电头脱线后集电杆搭接连线网正负线造成线网短路。目前无缝钢管已由铝合金替代,不但减轻了集电杆自身的重量,还由集电杆本身取代了连接集电头的高压导线。
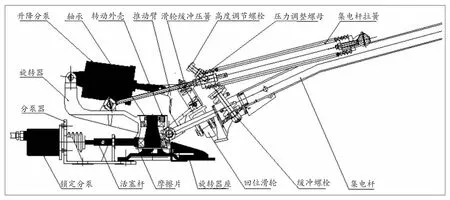
图1 集电器构造(局部)
集电座是集电杆的支撑部分,包括水平旋转、垂直方向运动两部分,水平旋转部分是由带轴头的底座和单列圆锥滚子轴承套上转动的外壳组成,可使集电杆沿座中心在纵轴两侧各110°的范围内作水平旋转。垂直方向运动部分由杆、夹持器、双脚叉形器、横轴和拉簧等构成,夹持器通过杆与双脚叉形器连为一整体,并可对横轴作垂直面的转动,集电器对触线的压力是通过2个拉力弹簧调节杆来实现,集电器的自由高度是通过集电器座上的限位机构(弹簧限位器、高度调节螺栓等组成)实现的。
绳箱或拉绳用于手动拉升集电杆。拉绳用来通过人力从线网上拉下集电杆,或把集电杆搭接到线网上。绳箱用来收、放拉绳,绳箱上设有棘轮机构,可限制集电器脱线时的高度。
集电杆升降装置安装在集电座的旋转器上,由升降机构和水平旋转锁定机构两部分组成,升降机构由气缸、推动臂和滑轮组成,水平旋转锁定机构由气缸和推杆摩擦片组成。
集电器的工作原理如下:
升杆过程:驾驶员解除降杆开关(关闭降落阀门),升降气缸排气(气缸内气体经电磁阀排入大气),集电杆拉簧将集电杆拉起,实现升杆。在升杆过程完成前,水平旋转锁定气缸一直处于锁定状态,完成升杆动作后,解除旋转器锁定状态,集电杆恢复自由旋转功能,可以正常应用线网电源行驶。
降杆过程:当驾驶员接通降落阀时,压缩空气经电磁阀进入升降气缸,使活塞杆外移,经推动臂推动集电杆克服集电杆拉簧拉力,使集电杆在左右45°范围内降落,通过下滑轮沿旋转座上的滑道回归中心位置,最终集电杆降落在车顶后部的集电杆托架上。完成降杆动作后,接通锁定阀门,压缩空气经电磁阀进入水平旋转锁定气缸,推动活塞杆,使之与连接的摩擦片紧压在旋转器上,锁定旋转器,避免行车过程中集电杆左右摆动。
1.3 应用问题
目前国内运行的双源无轨电车,其集电系统多为上个世纪80年代产品,均是在弹簧蓄力集电器的基础上,依靠气动系统,使用气缸推动集电器与触网分离,并使用机械装置保证集电器回归零位,在集电器进行升杆搭线时,需要司机人工对位甚至下车手工搭线,不仅仅在国内,即使在欧洲的瑞士、匈牙利等地,其在用的集电器也是类似结构。
该种集电器的控制方式主要为:通过电磁阀控制气缸的进排气,利用气体压缩产生的压力克服集电杆大簧的拉力来实现集电杆的升降动作,依靠集电杆自身的重力及大簧的拉力实现集电杆自动回到车顶中部位置,无论是结构还是性能都显落后,尤其是对升、降杆动作的控制,比较生硬,对线网上的捕捉器和车辆顶部的收杆座冲击较大,对集电器自身的影响也较大,使得集电系统故障率相对比较高。车辆日常运行过程中,在捕捉线网时对车辆停放位置要求十分苛刻,自动捕捉成功率非常低,从而导致线网上的捕捉器利用率较低。为了提高车辆运行效率,绝大部分驾驶员采取直接下车进行人工搭杆的方式,而在路面交通状况日益复杂的情况下,这对驾驶员的人身安全带来了不利因素,随着车辆技术的不断发展,目前的集电系统已呈现出跟不上车辆技术发展步伐的趋势。
目前在双源无轨电车上应用的集电器都没有实现智能化控制,对自动捕捉线网技术的应用基本上处于空白阶段,而且再用集电系统的故障率相对较高,因此,研究智能型集电器对双源无轨电车的技术发展有着深远意义。为此,我们重点对双源无轨电车集电器自动捕捉线网技术方案进行了设计,并对由此开发的产品进行了应用试验。
2 智能型集电器设计
集电器线网捕捉和升杆、降杆控制是一个较为复杂的系统,在实现线网自动捕捉的过程中,需对集电杆的实时状态进行一系列的测算和信息转化,结合相应的逻辑关系转变成集电杆的动作状态,其中控制逻辑关系的设定非常重要。
为了便于分析和识别,将集电杆的状态设定为六种,见状态分析图(图2),分别是:零位状态、触线位状态、自由位状态、升杆捕获状态、强制升杆状态、降杆状态,具体定义如下:
零位状态:机构处于收杆座内,收杆座关闭,集电杆的高度在设定阈值范围内,行程开关到位;
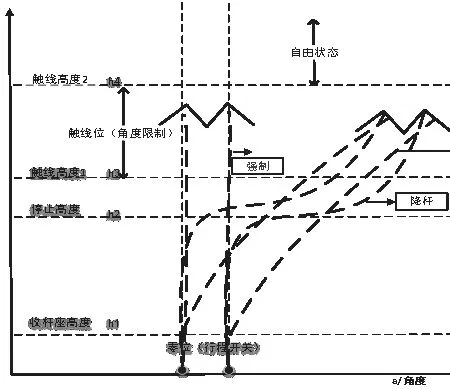
图2 集电杆状态分析图
触线位状态:集电杆处于触线网上,集电杆的高度与角度都在设定阈值内(线网高低波动范围);
自由位状态:集电杆非零位与触线位的静止状态;
升杆捕获状态:集电杆处于零位状态,司机触发升杆指令,相机检测到“M”捕捉器坐标信息转发给姿态控制器,姿态控制器换算出捕捉器的位置,并规划出合适的运动曲线;
强制升杆状态:横摆电机锁住零位位置,集电杆保持上升;
降杆状态:集电杆先降到安全高度,横摆电机带动集电杆回归零位,再降到收杆座内。
2.1 自动捕捉设计
主要控制策略:司机依据车辆运行需求向车头控制器发送升杆需求指令,车头控制器将采集到的指令以及通过整车控制器采集到的车辆运行状态信息转发给姿态控制器,姿态控制器对集电杆所处状态进行采集检测,同时相机控制器对“M捕捉器”进行识别,如果姿态控制器及相机控制器检测结果均符合升杆捕捉条件,则姿态控制器向阀岛控制器、横摆电机控制器发送动作响应指令,此时,收杆座打开,集电杆升起开始进行捕捉动作,整个过程中,相机控制器对集电杆的状态进行实时监控,并通过阀岛控制器及横摆电机控制器进行适时调整,如果升杆捕捉到位,则能检测到线网充电信息,整个捕捉动作完成,否则此次捕捉失败,结束此次捕捉动作。
升杆捕捉过程中,如果姿态控制器检测到集电杆处于非零位状态,则需再次对集电杆状态进行检测,同时姿态控制器将检测结果反馈给车头控制器及显示器,从而告知司机集电杆处于非零位状态,需先将集电杆调整为零位状态。如果对集电杆状态及“M捕捉器”识别超时,则直接返回到升杆需求指令步骤,开始重新进行检测,直至完成,自动捕捉控制流程如图3所示。

图3 自动捕捉控制流程
2.2 降杆锁定设计
主要控制策略:司机向车头控制器发送降杆需求指令,车头控制器将采集到的指令以及通过整车控制器采集到的车辆运行状态信息转发给姿态控制器,姿态控制器对集电杆所处状态进行采集检测,如果姿态控制器检测结果均符合降杆条件,那么姿态控制器向阀岛控制器、横摆电机控制器发送动作响应指令,此时,收杆座打开,集电杆开始下降动作,整个过程中,相机控制器对集电杆的状态进行实时监控,并通过阀岛控制器及横摆电机控制器进行适时调整,当集电杆下降至安全高度时,横摆电机开始执行回位动作,当检测到集电杆到达零位状态后,集电杆再度下降至收杆座底部,收杆座关闭并锁定,降杆动作结束。
降杆过程中,若姿态控制器检测到集电杆处于非升起状态(触线状态和自由状态),则需再次对集电杆状态进行检测,同时姿态控制器将检测结果反馈给车头控制器及显示器,从而告知司机集电杆处于非升起状态。在集电杆下降时,如果未下降至安全高度,则再次进行降杆动作,直至集电杆降至安全高度。在集电杆下降至零位状态检测时,若检测到未达到零位状态,则继续由横摆电机进行回位调整动作,直至回到零位状态,若在对零位状态进行检测时超时,则执行机械回位动作,即收杆座关闭锁定,集电杆不再下降,同时将动作结果反馈给显示器,从而告知司机,降杆锁定控制流程如图4所示。
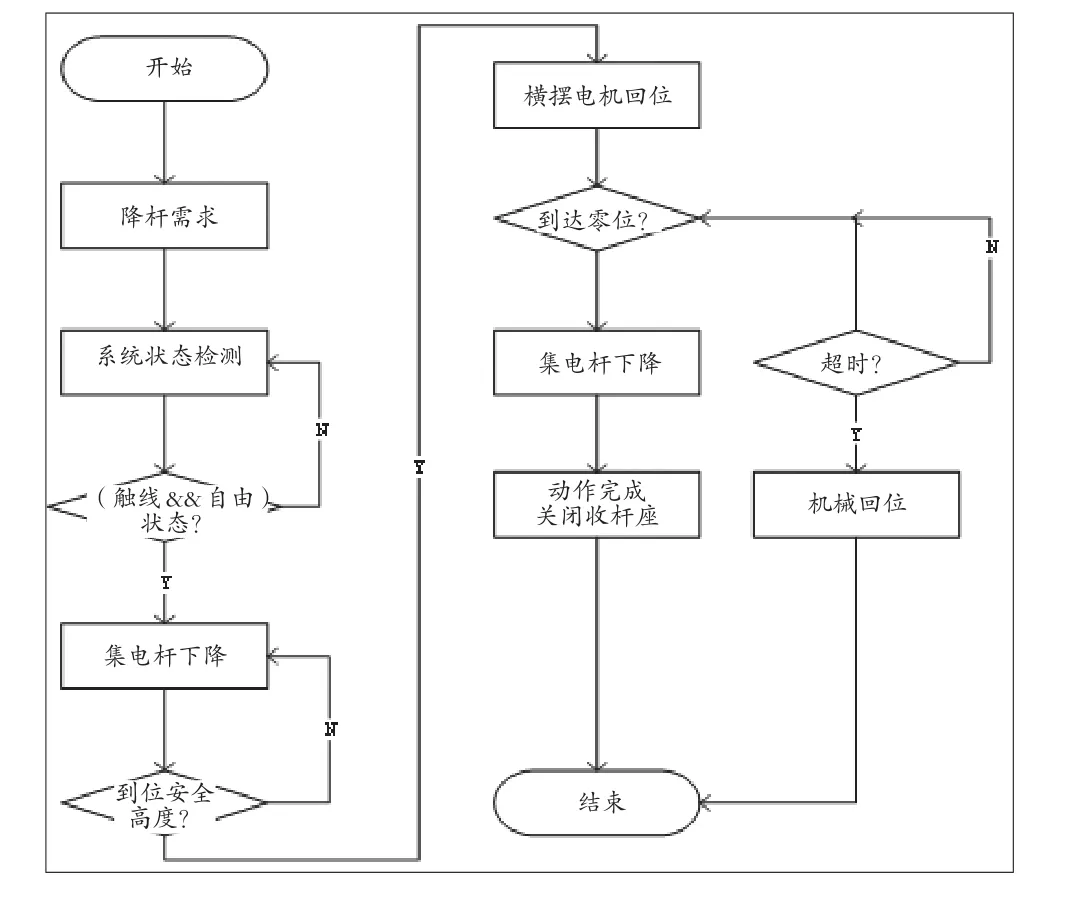
图4 降杆锁定控制流程
3 系统结构设计
智能型集电器机械结构是在充分参照原有双源无轨电车集电器结构的基础上进行设计的,在设计过程中以集电器运行实际状况为出发点,充分考虑集电器的工作效率、故障率、稳定性等因素,着重在收杆座、压缩气缸、旋转机构、集电杆拉簧等主要部件上进行了重新设计,确保了集电器智能化的实现。
3.1 智能集电器总成结构
智能集电器总成主要由集电靴、气动收杆座、集电杆、自升型执行器总成、电控总成及底座总成构成(图5)。新型智能集电器总成中的集电头、集电杆在结构上未做更改,仍采用现有的技术,集电头为防刮线式集电头,集电杆采用铝合金材料;底座总成由于升降杆执行机构的变化进行了相应的改进,变动不是很大;此次智能集电器的设计主要体现在自升型执行器总成及气动收杆座总成上。
3.2 自升型执行器总成
自升型执行器总成兼容原有的安装尺寸,收杆后自身高度0.5m,按照车辆设计要求,可保证整车最高不超过3.5m;保留双源无轨电车集电系统三级绝缘模式,采用硬线控制。其主要结构如图6所示。
横摆电机采用永磁同步电机,一体化设计,结构紧凑。电机采用外转子设计,惯量小、扭矩大,对杆零阻力、不脱线;位置伺服控制,主动横向摆动,集成高精度旋变,监控集电杆角度。
竖摆系统采用气压控制,继承了气动系统的绝缘性;位置伺服控制,动作柔和可控,实时监控,安全可靠。
自升型执行器总成具备良好的兼容性,保持原有的集电杆、集电靴、拉簧、绳箱不变,兼容集电器原有功能不变,便于维护,兼容现有线网和捕捉器。
3.3 气动收杆座总成
收杆座整体结构由三大部分组成,分别为壳体、翻钩组件、吹气机构,如图7所示。
壳体部分:收杆座外壳是从各种功能需求出发进行的结构设计,充分考虑了摄像头和吹气机构的安装位置,以及集电杆落下时能有效防止集电杆绝缘层破损的问题。首先,根据三维模型和二维图纸的排布确定摄像头和吹气机构的位置安排,保证吹气机构可以有效去除镜头前的雨水和污物,又通过样机试验,证明了所选位置的合理性。然后选取D型V带作为降杆时的缓冲物,有效保护了集电杆的绝缘层,且V带耐老化性较好,可长时间使用,提高了缓冲功能的可靠性。
翻钩组件:翻钩组件机构选用气动方式,其动作控制由阀岛总成统一进行。选取四连杆机构,采用蟹爪式的动作形式,在集电杆搭线工作时,翻钩机构保持打开状态,降杆时阀岛控制机构闭合,从而将集电杆锁在收杆座中,有效防止集电杆意外升杆造成严重事故。翻钩表面浸塑处理,防止集电杆绝缘层被破坏。

图5 智能集电器总成结构图

图6 自升型执行器总成结构图
吹气机构:吹气机构功能是使用高压气体去除镜头前的雨水和污物,在雨雪等天气时,保证图像识别系统可以正常工作。所选用的气路零件材料包括铝合金、不锈钢和黄铜,不会因生锈而导致功能失效,提高了吹气机构的可靠性。吹气嘴的选择是通过模拟实际淋雨情况进行多种形式气嘴试验最终确定的,该气嘴在试验条件下可有效去除镜头前的雨水,且通过实际样车测试,功能满足使用要求。
4 智能型集电器应用效果
产品设计开发完成后,为进一步验证其性能,智能集电器在北京公交集团4辆车上进行装车试运行验证,截至2019年1月底已运行3年多,期间智能型集电器整体运行状况良好,主要表现在以下几个方面。
(1)系统安全性能。按照双源无轨电车产品耐压标准对智能型集电器进行了绝缘和耐压测试,绝缘测试结果为一级绝缘、二级绝缘的值均为无穷大,对系统进行3500V/AC的耐压测验,漏电流小于2mA,没有表面跳火现象和绝缘材料击穿等现象,满足双源无轨电车的耐压性能要求。
(2)系统匹配性。产品路试选装在102路车辆及运行线路上,在现有捕捉器上加装了集电器捕捉识别标识(图8),智能型集电器安装在原有集电系统的底座上,其安装尺寸与原系统相同,具有互换性,对车辆的改动较小,车辆路试工况未做任何调整,完全按照原来的运行状态进行试验。整体而言,对线网及车辆的改动均较小,产品与原有集电器具有良好的互换性,与在用车辆的匹配性较好,且通过4辆车的改造,已形成成熟的工艺。
(3)系统可靠性。通过多次自动捕捉试验,车辆停放在捕捉器位置左、右各2m范围内自动捕捉功能均完好有效,对车辆停放位置要求较为宽松。原车集电器对车辆停放要求十分苛刻,要求车辆必须停放在捕捉器正下方,且集电杆升起时集电头正对捕捉器。相比而言,在进行自动捕捉时,新系统降低了对司机驾驶能力的要求,同时也提升了车辆的运行效率,且集电杆在脱离线网后能够实现自动收杆功能,也体现出了新系统的安全性。
通过对系统运行3年的故障统计,试验期间智能型集电器共计出现了3次故障。
(1)试验过程中出现了收杆座锁钩锁住集电杆而无法升起问题,原因是锁钩出现了卡滞,且在锁死后,人工打开锁钩困难,锁钩的人工打开装置在车顶,设计时未考虑集电杆被锁住时,天窗无法打开问题,目前已对锁止机构进行了改进。
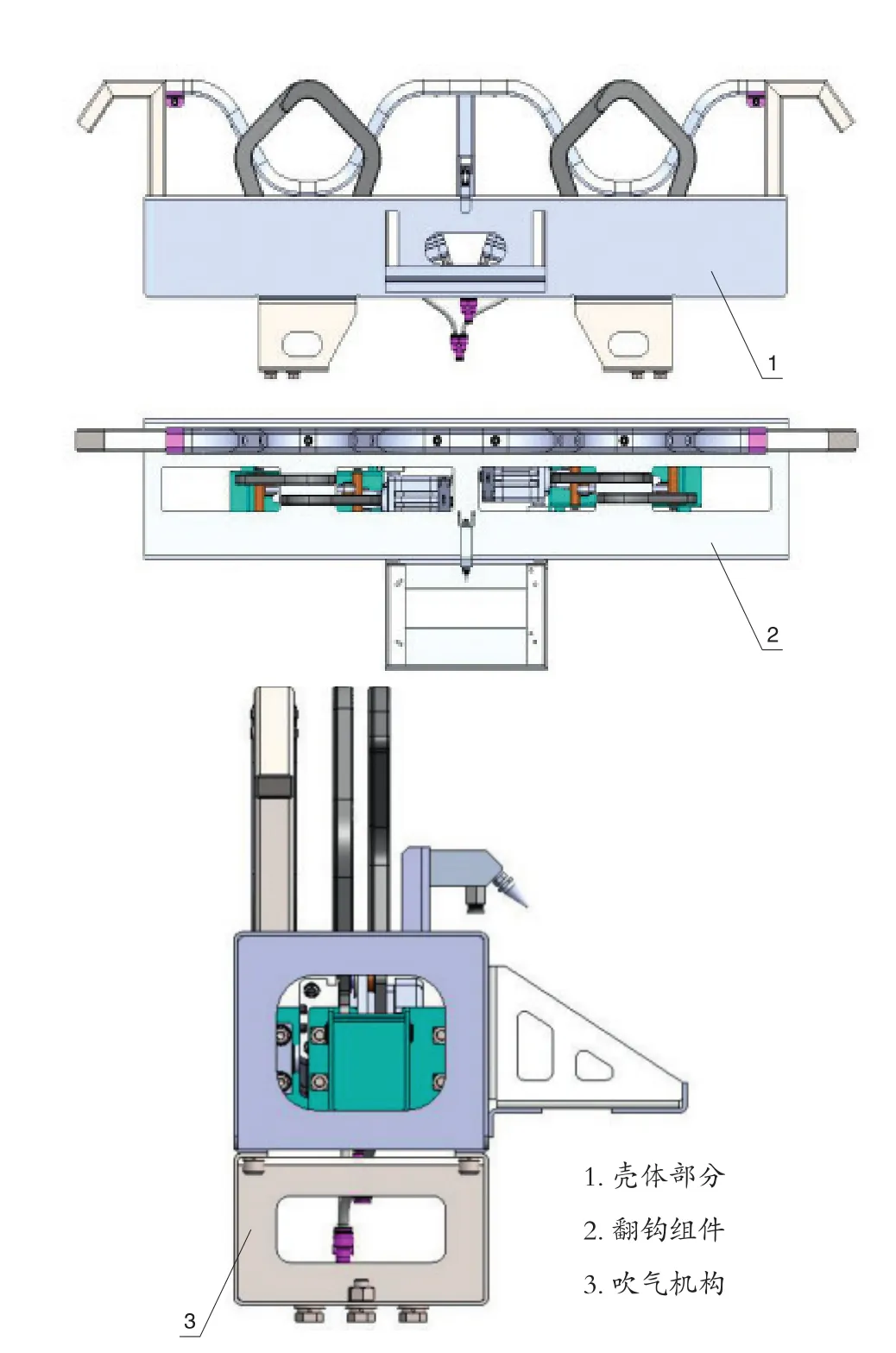
图7 气动收杆座总成结构图

图8 捕捉识别标识
(2)雨雪天气情况下,当摄像头屏幕上出现泥状污物时,识别捕捉标识困难,不能自动升起,之前为手动控制清洁(吹气方式),现改为按下升杆时自动清洁5s。
(3)在升杆时,出现两根集电杆往一个“帽子”里钻的现象,原因为车顶位置不平稳,可通过调试程序解决。
(4)系统维修。系统维修完全依照传统的方式和周期进行,整体结构简单,维修方便,不仅没有额外增加维修成本,还有一定程度的降低,滑块更换能在地面进行,省力、方便、安全。
通过对智能型集电器的装车试运行验证,其使用和操作方法较为简便,具有良好的人机交互功能,非常容易被司机接受。通过3年多的装车运行试验,在车辆日常运营过程中较为稳定,不仅故障率较低,集电杆在车辆运行过程中发生脱线时,能够迅速收回,有效避免了线网架空事故的发生。经过对主要零部件的拆检,未发现异常磨损等情况。试验周期内,系统及主要零部件工作状况稳定,在捕捉器下,对车辆的停放位置要求较为宽松,捕捉器位置左、右各2m范围内均能实现自动捕捉成功率达到100%,提高了车辆的运行效率,大大降低了司机的劳动强度,同时也避免司机下车搭杆所带来的人身安全风险,受到了司机的一致好评。
目前北京区域运营的双源无轨电车需要司机在车道的指定位置停车,要求条件较为苛刻,司机只能依靠经验去判断停车状况,然后再操作集电杆捕捉装置完成触线取电工作。智能型集电器不需要依赖司机准确的停车位置,在一定的区域内就可以完成捕捉线网工作,操作是依靠先进的图像识别技术与可靠的伺服控制技术。
随着科学技术的不断进步,双源无轨电车集电系统将逐渐实现集成化、系统化,集电杆搭杆将不再需要司机操作,在日常运营时,系统自动完成搭线充电任务,智能型集电系统使用图像识别系统捕捉线网,车辆在线充电行驶时若发生脱线可自动收回。集电系统具有更高的适应性,也使得一些日常供电线网设备更高效,将为进一步缩短高压架空网的长度提供可能。我们畅想在不久的将来,更加智能的新型集电器将不再依托捕捉器捕捉线网,可随时根据车辆行驶状态与动力需求判断是否需要捕捉高空架线网,并自动控制集电杆完成搭杆动作,不再需要停车和司机参与,使驾驶员的操作更加方便智能,大幅度提高车辆运营的安全性。
猜你喜欢
湖北电力(2022年3期)2022-07-06
科学与信息化(2021年12期)2021-12-27
合成材料老化与应用(2021年4期)2021-08-28
油气田地面工程(2020年6期)2020-06-12
客车技术与研究(2019年5期)2019-10-24
铁道通信信号(2019年5期)2019-10-10
铁道通信信号(2019年12期)2019-05-21
铁道通信信号(2019年2期)2019-03-26
决策与信息(2014年21期)2014-12-13
科技资讯(2014年13期)2014-11-10