基于走跑类运动容量的城市公园园路形态特征研究
——以哈尔滨为例
2019-07-24 01:44赵晓龙
中国园林 2019年6期
赵晓龙
侯韫婧
邱 璇
吕 飞
2016年,世界卫生组织发布《城市健康全球报告》,提出目前城市新疫情:慢性疾病致死占死亡人数的63%。习近平在十九大提出“要把人民健康放在优先发展的战略地位”“将健康融入所有政策”的“健康中国”国家战略。有效体力活动是减少慢性病发生、增强公共健康的重要途径,也是环境主动干预健康的重要切入点[1-3]。公园是市民进行休闲体力活动的主要场所[4],走跑类运动,是深受市民喜爱的低门槛休闲运动,主要由园路空间承载。基于走跑类运动视角,营造良好运动体验,挖掘园路运动承载力,是我们有待研究的课题。
在绿色空间与运动健康关系研究中,有学者从实体形态要素角度,发现绿色空间长、宽、高及高宽比[5-7]、绿视率[8]、遮阴程度[9-10]等空间形态特征对休闲体力活动水平的影响。但是缺乏从运动强度和容量视角下对园路的细化分类,同时少有研究提出有效的优化设计策略。
运动视角下园路形态特征规划设计亟待实证研究的支撑,并回答下列问题:1)基于运动容量视角,如何细分园路空间;2)哪些形态特征显著地影响运动容量;3)如何优化园路规划设计以推动走跑类运动容量的高效供给。因此,本研究基于运动容量实测结果,细分园路空间;通过公共参与GIS平台,建立环境感知偏好与空间形态特征关联;实证辨析形态特征与走跑类运动容量关联性,识别显著特征;提出提升走跑类运动容量的园路规划设计优化策略。提高城市公园走跑类运动吸引力,为公园运动存量优化提供理论依据和实践推进方向。
1 研究区域和数据采集
我们对主城区范围内16处高活力公园进行预调研,最后选取兆麟公园、尚志公园和古梨园为研究对象。3处公园均为非游乐设施性质、10hm2左右、免费入园、自然要素丰富、交通便捷、周边社区密度和居民社会经济地位情况相近的面状综合性公园。依据可视且可达原则,我们将公园空间系统分割为149个研究单元,其中兆麟公园空间47个,尚志公园空间62个,古梨园空间40个(图1)。模拟运动人群逆时针运动,只记录在运动路线中视线可见并可达的空间分割关系。排除了由于茂密植物遮挡视线造成空间不可见,或水体、挡土墙等空间要素不遮挡视线,但在物理上分割空间,造成了空间不可达的2种情况。
调研时段为2018年过渡季节3月末到4月初,在非下雪、雾霾天气下,共进行2组16d有效观测(冬末8d,初春8d),其中包括4天随机周末观测和12d随机工作日观测。观测时段为6:30—16:00,以30min为标准,数据采集标准依据世界卫生组织健康标准快步走频率≥100步/min,跑步频率≥150步/min,记录空间内瞬时快步走和跑步2类走跑类运动人数。
2 基于走跑类运动容量的园路空间
走跑类运动包含快步走和跑步,属于中高强度休闲体力活动,具有连续性和忌干扰性。不同于运动场或室内跑步机,城市公园中的走跑类行为兼顾游览和游憩等复合需求。
2.1 园路分类
根据公共健康学科标准,运动绩效标准衡量单位为代谢当量消耗(单位时间每人运动消耗的代谢当量数量值)[12]。假设静息时能量消耗为1代谢当量(METs),参照2011年美国体力活动能量消耗编码表,快步走能量消耗为4.8METs,跑步为7.0METs。研究记录了2类走跑类运动的运动人数,根据团队提出运动容量为不同类型的运动人数与对应代谢当量消耗值的乘积和[13]的概念,计算出各样本空间的走跑类运动容量。
本文以走跑类运动容量为标准,计算所有园路空间运动容量,计算平均值为52.29METs。低于52.29METs归为低容量,高于52.29METs归为高容量。提出3类园路空间分类:无走跑类运动园路、低容量园路和高容量园路,并进行可视化呈现(图1)。
2.2 不同园路空间分布
2.2.1 无走跑类运动园路分布
这部分空间使用人群主要以散步、游憩为使用目的,移动速度低于快步走最低步速100步/min,未达到公共健康学科运动绩效标准,所以其属于无走跑类运动园路。该园路空间占调研样本69.8%,以公园次级园路或游步小径为主要空间载体。
2.2.2 低容量园路分布
使用人群以游憩和游览为主要使用目的,以运动为次要目的。对于走跑类运动主体来说,运动过程也兼具休闲和游览等多重目的。该园路空间占调研样本10.1%,以公园主园路或次级园路为主要空间载体,一般临近可以增加游憩体验的自然要素,例如水体,或连接公园主要景点空间。
2.2.3 高容量园路分布
这部分空间使用人群以运动为主导使用目的,在空间中通过运动带来最大的健康效益是其行为主导需求。该园路空间占调研样本20.1%,以公园主园路和次级园路为主要空间载体。一般为公园最外圈环路与部分公园内部环形主路。
3 基于公共参与GIS技术的运动环境感知偏好
借助所在团队自主研发的公共参与GIS(PPGIS)微信程序,筛选公园走跑类人群环境感知高频关键词。在微信程序中调用腾讯位置服务功能,添加位置服务软件开发工具包(SDK),使用JavaScript/微信标签语言(WXML)/微信样式表(WXSS)前端技术栈,开发应用程序接口(API)进行相关函数调用,成功实现哈尔滨绿地公共参与地图(PPMAP)与行为附属信息精准对接,并转换为矢量图层导入GIS平台进行后续数据处理。
研究通过PPGIS微信程序平台获得哈尔滨公园走跑类运动人群对运动环境的感知偏好描述[14],选取了排名前5的高频关键词,开阔、安全、温暖、无干扰和氛围热烈,排除了“舒适”等低频且描述模糊的关键词。
根据高频关键词,基于环境感知偏好文献研究以及焦点小组讨论,研究筛选出10个形态特征指标因子:客观指标因子8个,主观指标因子2个(表1)。通过实地测量获得客观形态特征指标:长度、宽度、高度、长宽比、高宽比、线型、铺装类型和高差变化;通过实地模拟运动者,获得运动者视角下的顶界面鱼眼图像和运动视线图像,分别利用Rayman模型和SegNet系统量化主观形态特征指标:天空可视因子[15]和绿视率(图2)。
4 实证分析
通过调研我们发现,哈尔滨城市公园中,所有走跑类运动者都进行环线运动,不会出现在同一园路单元折返的运动情况。这可能与城市公园整体景观质量较好,或环境刺激会激发走跑类运动人群游览的潜在认知有关。所以,我们以10个形态特征为自变量,以走跑类运动容量为因变量,识别影响运动容量的显著空间形态特征。其中,研究采用卡方检验识别自变量中3个类别变量指标因子:线型、铺装类型和高差变化;另外,采用Pearson相关性分析和曲线回归识别自变量中7个连续变量指标因子:长度值、宽度值、长宽比值、高度值、高宽比值、天空可视因子值和绿视率值。
4.1 类别变量指标因子识别
采用卡方检验识别影响运动容量的形态特征因子。表2结果表明如下。1)有无高差变化对园路空间内走跑类运动容量产生影响。没有高差变化的样本空间内产生显著高的运动容量。2)铺装变化指标因子P<0.05,但是最小期望计数为2.42,小于5,说明本研究中缺乏足够的样本量,无法确定铺装变化是否对运动的发生产生影响。原因可能在于,公园园路铺装多采用适合人群聚集的混凝土类和平坦的砖材类,缺少裸露土地和砾石的设计,使得样本缺乏变化。3)线型变化,即园路是直线型还是曲线型空间,对运动路线的选择没有影响。
4.2 连续变量指标因子识别
对7个空间形态特征连续变量与走跑类运动容量进行Pearson相关性分析,筛除无显著性关联因子高度值和长宽比值,识别存在关联性的长度值、绿视率值、天空可视因子值、宽度值和高宽比值(表3)。对显著相关5个指标因子分别建立单特征回归方程,观察指标因子适宜值范围。结果显示如下。
1)根据长度值模型,长度与走跑类运动容量基本呈正相关趋势。长度<140m时,随着长度的增加,运动容量显著增加;长度介于140~280m时,运动容量呈极缓慢下降趋势;长度>280m时,运动容量值继续迅速增加。但在调研公园中,大于280m的长距离园路空间较少。
2)根据宽度值模型,宽度值<12m时,随着宽度值的增加,走跑类运动容量显著增加,在12m时到达峰值,宽度值>12m,宽度值与运动容量呈负相关趋势。由于走跑类运动人群不希望穿越广场舞或太极类运动空间,园路成为公园中较受欢迎的园路空间,模型表明高容量的园路空间一般为公园主路。
3)根据天空可视因子模型,天空可视因子与走跑类运动容量基本呈正相关趋势。天空可视因子<0.4时,随着天空可视因子的增加,运动容量显著增加;天空可视因子介于0.4~0.7时,运动容量几乎没有变化;天空可视因子>0.7,运动容量值继续增加。模型表明高运动容量园路空间,植物较少遮挡天空,既带来开阔的运动体验,又通过太阳辐射改善微气候,此类空间采光较好,也会提升安全体验。但是需要特殊说明的是,这也与调研时段气温较低,运动人群倾向于微气候温暖的园路空间有关。
4)根据高宽比值模型,高宽比值<2.4时,随着高宽比值的增加,走跑类运动容量缓慢增加,高宽比值>2.4时,随着高宽比值的增加,运动容量迅速下降。模型表明运动人群偏向于两旁绿化良好的路径空间。例如5m宽的园路,两旁行道树树高不要超过12m,否则会削弱空间的开阔感。
5)根据绿视率模型,绿视率<30%,随着绿视率的增加,运动容量显著降低,并在30%时达到最低值;在30%~75%区间内,运动容量迅速增加,并在75%时到达峰值;绿视率>75%时,运动容量值迅速下降。公园中植物种植情况一般较好,很少出现绿视率<30%的路径空间;绿视率>75%时,可能出现空间过于围合或植物过于高大的情况,降低空间开敞度,提高了私密性,反而降低了运动意愿。值得注意的是,调研时段发生在哈尔滨过渡季节冬末和早春,由于寒地城市植物季相变化差异较大,该时段绿视率很难达到75%的最大极值,所以模型仅反映了在绿视率超过30%时,绿视率越高,运动容量越高的变化趋势。
4.3 高运动容量园路形态特征实证模型
通过上述单特征回归方程,为进一步降低变量间存在的多重共线对模型分析结果的影响,我们对存在显著的形态特征开三次方根,采用逐步删除变量的方法进行多元回归,进行5次回归模型建构(表4)。
结果表明:常量为-146.526,模型拟合程度R2=0.256,说明纳入模型的5个形态特征变量与走跑类运动容量显著相关,按影响程度排序分别为长度值、宽度值、天空可视因子值、高宽比值和绿视率值,但非强相关,可以解释运动容量变化的部分原因。上述5个连续变量形态特征与高差变化类别变量形态特征共同影响了城市公园园路空间的走跑类运动容量。公园中园路的组织特征和设施特征也会对运动容量产生影响,未来的研究会进一步加入其他环境特征因子。
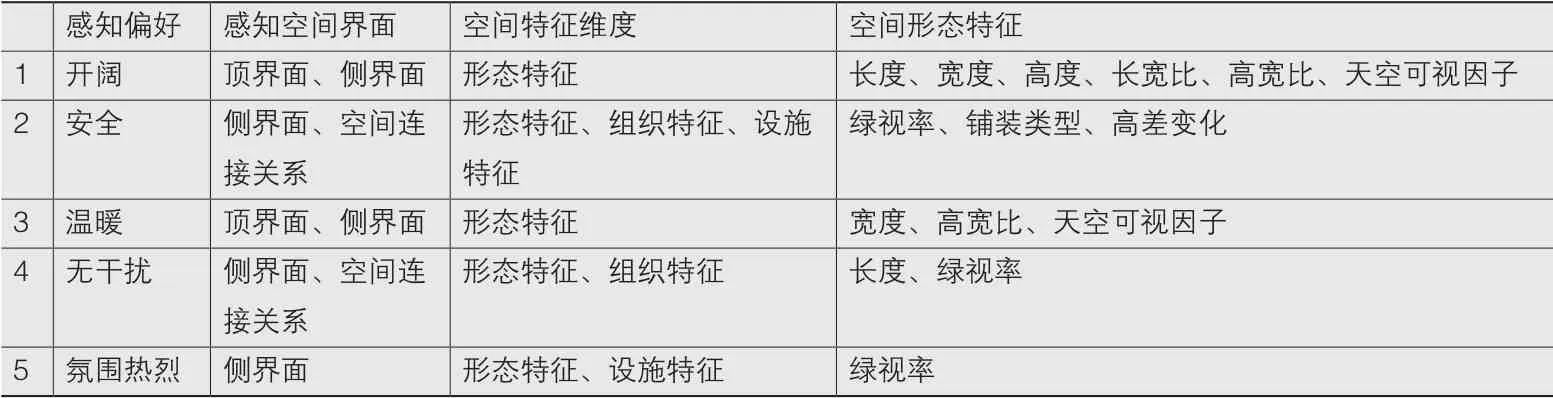
表1 基于感知偏好的空间形态特征指标筛选
5 优化策略
基于园路空间分布特征和实证数理模型分析,本研究针对走跑类运动,提出提升运动容量的园路规划布局与空间设计优化路径。通过对比高容量园路分布规律,基于形态特征指标识别结果,我们提出合理进行城市公园园路布局、塑造长路径开敞园路模式,以营造具有连续性、少干扰且具有一定氛围感的走跑类优质园路空间,以促发更多走跑类行为的空间优化策略。

表2 卡方检验结果
5.1 提高容量园路规划布局策略
在园路布局方面,把控城市公园体系使用多元性,兼顾城市公园观光游览等使用功能,利用高容量园路分布规律,强调运动与游憩功能的复合使用,是塑造促进走跑类运动城市公园的基本前提。
1)主路重叠模式延展运动距离。本文发现高容量走跑类运动园路一般与环状主园路重叠(图1)。在城市公园面积不变、路网密度不变的前提下,通过提高环状主路占比,延展高容量运动路径长度,从而提升走跑类运动容量。城市公园内走跑类运动一般存在固定运动路径,而运动者对运动绩效的自我评估通常由运动圈数决定。增加每圈固定运动路径的长度,即提升了园路承载走跑类运动总容量。
2)高密度园路系统营造运动氛围。研究提出在不改变公园总体格局前提下,提高局部园路密度,营造微循环园路空间系统。通过调研,我们发现古梨园空间25~空间30(图1),园路密度高、没有起到串联空间的基本作用,却承载了高容量的走跑类运动。原因可能在于古梨园前身为太平苗圃,此处为保留苗圃空间形式而改造的局部小空间。密集的园路空间营造了热烈的运动氛围。即便是不需团队配合的个人运动,视线可及的其他运动人群营造出更为积极的健身氛围,提高运动吸引力。

表3 空间形态特征与运动容量相关性和回归分析结果
5.2 提高容量园路形态特征空间设计策略
在保障城市公园多元性复合使用的前提下,对于以高容量走跑类运动为使用导向的园路空间,提出形态特征优化策略。通过上文实证数理模型分析,识别显著影响走跑类运动容量的影响因子:高差变化、长度值、宽度值、天空可视因子值、高宽比值和绿视率值,强调运动需求导向下的优质体验,是提升园路空间走跑类运动容量的内在本质。
1)长路径模式降低空间转换频率。适当增加园路空间长度,降低使用者在路线上变换空间的速度。美国迈阿密市圣查理新镇为提高镇区的步行适宜性,以理想步行距离400m为标准组织社区结构;本文为提升园路空间走跑类运动容量,提出以实证模型中长度最佳耦合值140m为标准,组织城市公园园路空间结构。
增加实际园路空间长度。适当增加园路空间长度,尽量减少运动路线频繁被十字路口打断的次数,保持走跑类运动人群连续的运动体验。成年人为达到健康标准跑步速度基本保持在每分钟150m,也就是说140m园路,停留时间约为56s。这个时间可以满足高强度运动者连续运动的运动需求,又可以避免长时间景致的单一带来的无趣感。
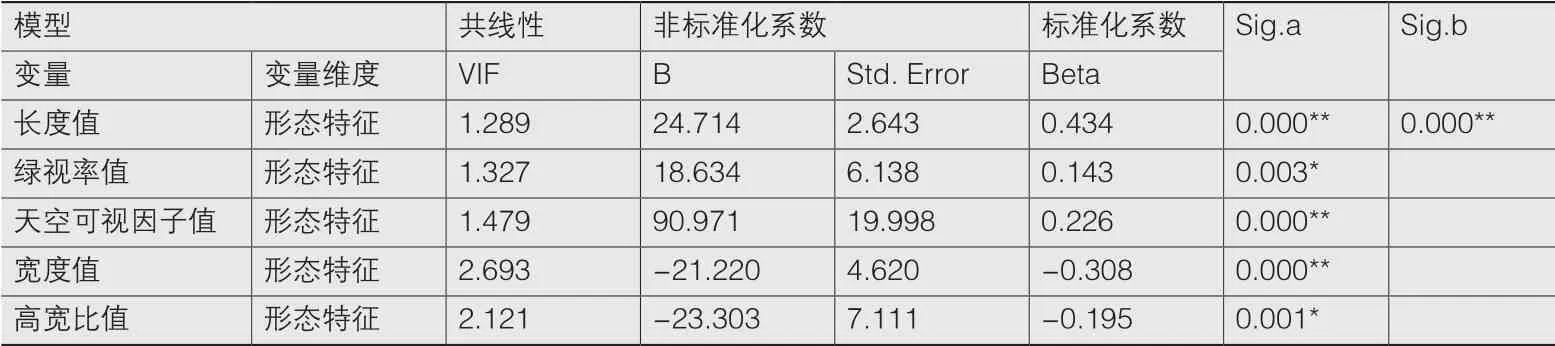
表4 高运动容量园路连续变量形态特征实证模型
增加视觉园路空间长度。采用植物或假山等要素适当遮挡视线,给移动速度相对较快的走跑类运动者造成连续运动空间的视线错觉。但是需要注意的是,要用指示牌对慢速的步行者和游览者进行标示。以兆麟公园中21、22号空间为例进行进一步阐释(图3)。21号园路空间试点A,两侧不断出现支路连接的次要运动单元空间。可在交叉路口通过种植遮挡视线的灌木树球,见A空间立面分析图,使得运动人群视线看不见次要运动单元空间中的其他运动类型人群,造成运动路径空间连续的视觉假象。对比22号园路空间试点B,两侧同样出现支路连接的次要运动单元空间,通透的视线明确地传递运动路径空间已经结束,需要重新选择运动路径的视觉信号,就会打断连续性的运动体验。
2)园路形态提高空间开敞程度。适当增加园路的开敞程度,改善走跑类空间使用者的视觉运动体验。
增加实际园路开敞程度。适当增加园路宽度,但不要超过12m,以免被广场舞等其他运动类型误认为活动广场空间而被占用,产生干扰。需要说明的是,随着宽度增加,对于同等高度和树形的行道树而言,天空可视因子值也会相应变大,联动影响会进一步增加园路的走跑类运动适宜性。
增加视觉园路开敞程度。绿视率、天空可视因子和高宽比主要通过行道树调整,选择分支点较低的乔木,甚至高大的花灌木,可以保证运动人群视线内较高的绿视率,但是也要加强园林植物修剪与管理,避免行道树过于茂盛导致绿视率超过75%(图4)。较高的天空可视因子意味着可以通过树种的选择或修剪管理保证尽量开阔的顶界面。同时应尽量避免空间高宽比超过2.4。如图4所示,同样是10m高的行道树,5m宽的主园路高宽比相比3m宽的支路高宽比更适宜运动容量的增加。
3)平坦性模式降低运动难度。不同于专业竞技人群追求高能耗运动,城市公园中应尽量避免出现能被人体感知的坡度或台阶,避免高差变化,以降低运动难度。
虽然有研究显示在郊野公园中,体力活动量与路面坡度呈正相关。但是本研究实证模型显示平坦的园路承载更多的走跑类运动容量。原因可能在于郊野公园多位于城市边缘,大部分市民对其使用频率较低,希望通过到访郊野公园游览更多的景致,所以为追求野外远足的使用体验会主要选取有高差变化的园路;而位于高密度居住区附近的城市公园,基本位于15min社区生活圈内,已经融入市民日常生活,城市公园内景致的变化很难引起市民的特别注意。而且由于面积较小,高差的变化很难带来视觉感受上的丰富变化,反而提高了走跑类运动难度,所以应尽量保证园路平坦程度。
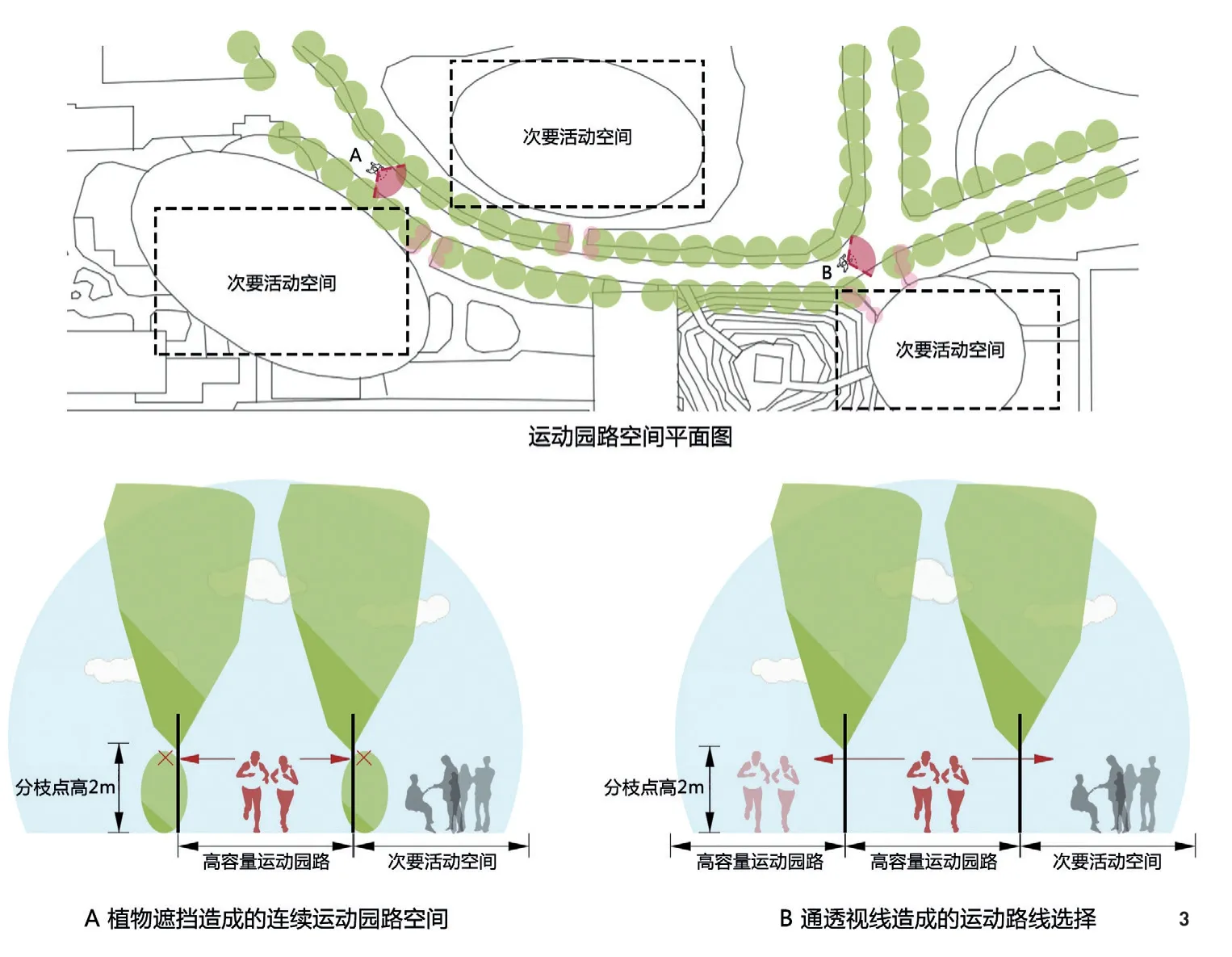
图3 调整视觉园路长度策略示意图

图4 行道树增加视觉开敞程度策略示意图
6 结语
城市公园空间形态特征属性是影响运动的直接影响因素[16]。研究基于运动容量视角细化了典型园路空间:无走跑类运动园路、低容量园路和高容量园路,并与10个空间形态特征建立关联。以运动容量为标准,识别寒地城市哈尔滨城市公园过渡季节高运动容量园路形态特征影响因子:高差变化、长度值、宽度值、天空可视因子值、高宽比值和绿视率值,阐释其作用机理,提出提升走跑类运动容量的园路规划布局与空间设计优化策略。由于天空可视因子等指标受季节影响较大,所以未来研究将集中在寒地极端气候(冬季),进行园路空间形态特征与走跑类运动容量的关联性探讨。研究提高城市公园园路运动适宜性,缓解城市运动空间不足的现实矛盾,将“健康中国”理念落地为具体的绿地规划设计政策。
猜你喜欢
美与时代·城市版(2022年3期)2022-04-25
汽车实用技术(2022年7期)2022-04-20
魅力中国(2021年25期)2021-08-30
疯狂英语·初中天地(2021年6期)2021-08-06
发明与创新·小学生(2020年4期)2020-08-14
北京园林(2020年4期)2020-01-18
活力(2019年21期)2019-04-01
发明与创新·小学生(2016年4期)2016-08-04
装饰装修天地(2015年5期)2015-10-21
群文天地(2011年12期)2011-07-12