基于无线通信的车辆主动防撞预警系统设计
2019-07-25 09:21
计算机测量与控制 2019年7期
(1.榆林职业技术学院,陕西 榆林 719000;2.长安大学 汽车学院,西安 710064)
0 引言
面对日益严峻的交通状况与即将到来的车辆智能化趋势,作为自主驾驶辅助系统之一的前车主动防撞预警系统研究成为了业界关注的焦点[1]。主动防撞预警主要利用各类传感器感知车辆行驶状况以提高驾驶安全性。相比利用激光雷达、微波传感器感知前方障碍物的方案,机器视觉系统具有成本低、蕴含信息量大、拓展性强等优势。无线联网技术能够方便的交换不同车辆信息,为预警判断提供了很好的辅助依据。
能否实现车辆的实时准确检测与选择合适的碰撞预警判据是评价主动防撞预警系统是否具有实用性与可靠性的关键。Milanes[2]等人提出一种以V2X网络为车速、车距感知手段,预测碰撞时间(Time To Collision, TTC)和车头时距为输入的模糊追尾碰撞预警模型。厦门大学李金龙[3]等人利用激光测距技术得到相对车距,应用各类辅助传感器在C51单片机上实现了车辆追尾的实时预警。上海交通大学黄慧玲[4]等人在向量梯度直方图(Histograms of Oriented Gradients,HOG)检测器与单目测距模型的基础上,加入隐马尔科夫模型实现了前方车辆行驶风险的量化评估与预警。SongW[5]等人利用视觉传感器与毫米波雷达融合获得了最终的动态和相对动态对象,将它们与在特殊车辆坐标系中根据车辆运动学模型获得的危险区域进行比较,有效地实现了预警功能。江苏大学刘军[6]等人利用成熟的OpenCV平台与视觉几何模型建立了车辆机器视觉体系,仅使用视觉传感器就实现了一整套车辆防撞预警功能。
基于单独某项技术的防撞预警系统容易受限于该技术自身缺陷而呈现出局限性,多系统融合的防撞预警实现方案成为未来发展的方向。本文结合机器视觉与无线网络的特点与优势,针对追尾事故的特点设计了一个纵向同车道车辆主动防撞预警系统,通过机器视觉技术提取前方车辆的位置、距离信息,利用无线网络采集车辆的相对车速并导入TTC预警模型,实现了纵向车辆防撞预警功能。
1 系统总体架构
如图1所示,本系统硬件基于联想R720计算平台,由MV-EM120C工业相机、VK282GPS车速传感器、XbeePRO900HP Zigbee网络节点、Arduino UnoR3开发板组成。软件部分在VS2010+OpenCV2.4.3环境下编写,分为车辆检测、视觉测距、无线网、预警判断四大模块。

图1 系统总体架构
1.1 硬件组成
系统硬件可分为本车系统与远端网络通信单元两部分,本车系统由计算处理终端、MV-EM120C工业相机、基于VK282的GPS架构车速传感器、Xbee PRO900HP网络通信节点以及连接各部分的千兆以太网线、USB数据线组成。远端网络通信单元由另一块Xbee PRO900HP节点、VK282车速传感器与Arduino UnoR3开发板组成。安装在车内前风窗玻璃上的工业相机连接后端处理系统组成机器视觉模块完成对车辆目标的检测与测距,两个VK282传感器通过Zigbee射频信号组成点对点传感器网络获取同车道前后两车的相对车速信息,最终的预警判断结果显示在本车处理终端上。
1.2 软件部分
软件部分由主程序与嵌入式软件组成,主程序基于MFC架构,利用HOG.cpp与SVM.cpp源文件相关函数加载训练文件形成在线车辆检测器,将工业相机采集的逐帧视频HOG信息输入检测器完成前方车辆检测,检测坐标输入单目测距函数完成车距计算。相对车速信息由单片机配合传感器网络采集,通过serialEvent()软中断将传感器数据封装为近似数据帧的结构在网络中传递,总体软件工作流程如图2所示。在编写过程中应用多线程技术,在程序进程下建立主线程、串口线程与车联网线程,各部分工作同时进行、互不干涉。解决了在数据处理高峰时段可能出现的程序卡顿问题。

图2 程序流程图
2 车辆检测算法
系统利用正、负样本经过HOG+SVM训练得到离线训练文件形成在线车辆检测器,配合千兆网工业相机采集的1280×960图像逐帧处理实现前方车辆目标的实时检测。具体实现步骤如下:
1)正负样本集的建立。
采集不同条件下的1419个车辆目标作为原始正样本,所有正样本均减至128×128尺寸并利用高斯模糊模拟远、中、近不同距离情况,形成4257幅128×128正样本。配合11290幅不小于正样本、具体尺寸各不相同的负样本组建正、负样本集。
2)检测器训练与强化训练。
检测器训练主要分两步,包括HOG信息提取与SVM检测器训练。首先利用网格法划定图像区域,遍历像素代入梯度计算公式[7]:
G(x,y)=
(1)
其中:R(x,y)为(x,y)坐标像素值,将图片内逐个像素单元代入算子[-1,0,1]完成位置梯度向量G(x,y)的计算,并利用二线插值法计算该向量在相邻角度通道的通道权值,结果导入样本HOG信息矩阵(sampleFeatureMat)与样本类型矩阵(sampleLabelMat),完成了HOG信息的提取与存储。
g(x)=WTx+b
(2)
其中:WT为高维可调权值向量矩阵,b为外部偏置,待测帧经HOG特征提取后代入式(2),对结果做二值判断即可实现样本的检测与分类。
一般情况下,把判别函数求取过程转化为条件极值问题,即求取在式(3)条件下,(4)的最小值问题。
(3)
di(WTxi+b)≥1
(4)
对式(3)、(4)应用拉格朗日乘数法,计算W、b如式(5)、(6)。

(5)

(6)
其中:α0为拉格朗日乘子,N为支持向量个数,通过式(5)、(6)的计算,得到SVM检测器,工程中检测器以xml文件形式存储。
初次训练完成后,将负样本输入通过式(1)-(6)过程得到的SVM检测器,检测结果称作误报或难样本。将难样本加入正负样本集中再次训练的过程称作强化学习,强化学习后的检测器具有更高的鲁棒性与更少的误报[9],试验表明1-2次强化学习可以大大改善检测器质量,但如果进一步强化学习,由于正样本不足,检测器趋于过拟合,效果不佳。
3)感兴趣区域设置。
在采集图像的基础上划分感兴趣区域,仅对本车道信息进行处理可以降低计算量与避免不必要的训练,感兴趣区域设置如图3所示。

图3 感兴趣区域设置
4)在线检测。
定义HOG Descriptor对象装载xml训练文件形成SVM检测器,由detectMultiScale()函数完成对视频帧的多尺度检测,检测到的目标图像坐标用矩形搜索框标识。实验表明,设定搜索框尺寸128×128,搜索步长16×16,缩放比例1.1较好的满足了车辆搜索的特点与软件对于实时性与多样性的需求,车辆检测效果如图4所示。

图4 车辆检测效果
3 车辆测距算法
车辆测距算法采用单目测距模型[10],算法原理图如图5所示。

图5 单目测距模型
测距模型利用车辆地面投影线与其在像平面坐标的关系判断真实物距,图中f为相机有效焦距,d为图像Y坐标与镜头中心Y轴坐标之差,D为真实车距,H为相机实际安装高度,β为相机安装俯仰角。在实际使用过程中β、H由安装时的标定信息获得,f取决于相机内部参数,d由坐标系换算得到,由几何原理可求得相对车距D:
(7)
在相机焦距f、安装高度H,俯仰角β确定的情况下,将像素坐标与光芯坐标差值带入(7)式计算得到最终相对车距D。
4 无线通讯网络的组建
为准确获取实时的相对车速,系统基于Zigbee架构搭建了采集速度信号的无线通讯网络,可以实时得到前后两车的相对车速。
组建无线通讯网络的主要工作包含网络组建与单片机嵌入式开发,具体内容如下:
1)网络节点配置。
试验表明,在车辆行驶工况下常见的2.4 GHz Zigbee节点由于电磁干扰、车辆阻挡、行驶车速等原因,常出现网络信号不稳定,丢包率增加等一系列问题。在对比了大量设备后,本文选择Digi公司基于Zigbee架构开发的XbeePRO900HP节点配合Arduino开发板实现无线通信网络。XbeePRO900HP工作在900 MHz频段,与常见的2.4 GHz设备相比进一步提高了发射功率与穿透力,在车辆行驶工况下有更好表现。
组网的关键在于确定无线网络通信标准,包括网络的域网地址(PANID)、信道掩码(ChannelMask)、波特率(BaudRate)等信息,本系统中设置PANID7FFF,ChannelMaskFFFFFFFFFFF7FFFF,BaudRate9600完成网络标准的确定。
通信标准确定后,利用节点的MAC地址对节点进行链接,提取节点64位地址高32位与低32位,将A节点MAC地址高32位与低32位设置为B节点发送MAC信息,同时在B节点设置A节点信息,设置完成后两个节点射频信号发送至对应地址完成组网。A、B节点对如图6所示。
图6 XbeePRO900HP节点对
除了上述基本设定外,依据道路交通环境应用的具体情况调整了包括发射功率、传输速率、睡眠时间在内的各类具体指标,指标随使用场景的需求呈现出多样化,本文所用无线通信网络部分参数如表1所示。

表1 无线通信部分参数
2)车速采集及发送系统设计。
为实现车速信息的采集与交互,本文开发了一套基于VK282GPS车速传感器和XbeePRO900HP的车速单片机采集系统,车速单片机采集系统如图7所示。

图7 车速单片机采集系统
图中包含VK282GPS传感器,XbeePRO900HP节点与协调整个系统的ArduinoUnoR3开发板,传感器以杜邦线介质连接开发板。传感器开始工作后,接收GPS信息并输入Zigbee元件接收端口,经射频信号发送至远端完成工作过程。
嵌入式软件开发在Arduino IDE环境下完成,定义Arduino的数字2、3接口为软串口SoftwareSerial,片内设置serialEvent()软中断,当系统读取到完整的车速NMEA信息后结束软中断并将数据封装为一个单元,由工作函数Loop()完成数据写入与发送,具体流程如图8所示。

图8 嵌入式工作流程图
本车接收到相应的车速信息后,在网络通信线程中利用第三方串口接收SDKCnComm.h新建串口类Com实现串口信息读取。结合本车采集车速信息解算得到前后两车的相对车速。
5 TTC预警策略
系统利用相对车速与相对车距结合TTC预警模型得到了一种基于TTC判据的碰撞预警算法,如公式(8)所示:
(8)
其中:Ttc代表计算预测碰撞时间,利用获取的实时车距D与相对车速V求得,实时获取Ttc与预设预警阈值Ts比较,当Ttc小于预警阈值时发出预警。
预警策略主要包含预警阈值的选取与最小预警间隔的设定,预警阈值按照公式(9)计算:
Ts=T1+Tr
(9)
其中:T1为预设预警阈值,Tr为人机工程学描述的报警驾驶员反应时间,参考文献[11]的相关研究,设定Tr=1.14 s,T1按工况不同设定为城市工况T1=2 s,高速路工况T1=4 s.
为防止预警过于频繁造成的驾驶员工作疲劳,且考虑预警后驾驶员即进入全神贯注状态,设置最小预警时间间隔Tg= 30 s,为驾驶员预留合理的事故处理与调整时间。
6 实验与结果分析
系统基于联想R720计算平台,CPU型号Intel® CoreTMi7-7700,视觉传感器采用配置35 mm焦距镜头的MV-EM 120C工业相机。相机分辨率1 280×960像素。
6.1 相机内外参数标定
利用棋盘格标定板和车道线、车道消失点与光心的相对关系完成相机内部参数、外部参数标定[11],利用标定工具完成的标定结果如下表。

表2 内、外参数标定结果
6.2 单目视觉测距实验
在标定完成后,测量镜头前方40-90米距离,每隔10米放置标桩标识位置,将实验车辆驶入标桩位置采集图像,利用测距算法根据图像像素坐标计算距离,40~90米位置图像采集如图9所示。

图9 40~90米采集图像
视频测距结果如下表3所示。
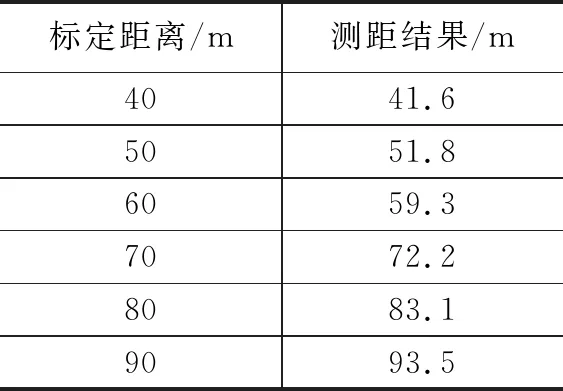
表3 测距实验结果
结果表明,在40~90米范围内,本系统测距误差小于±4 m,基本满足了需求。
3)车辆检测器性能测试。
系统检测离线采集的247幅车辆/非车辆目标,计算检测率、误检率、漏检率等指标完成测试。结果表明在理想光照条件下,对于随机采集的测试图片,该检测器表现良好,单帧图像平均处理时间100 ms、检测率高于95%、误检率低于3%、漏检率低于1%,部分车辆检测结果如图10所示。

图10 部分车辆检测效果图
4)无线通信网络性能测试。
网络性能测试包括利用无线通信模块的固定点极限距离测试与实际公路环境下的综合性能测试。
为确定Zigbee网络在公路无遮挡、两节点不移动情况下的极限通信距离,将两节点分别置于封闭道路相隔200米两端互相收发信息,结果表明,200米公路环境下无线通信网络信号稳定、良好,达到了应用的距离要求。
为测试行驶工况下网络的综合性能,将两节点分别安装在公路条件下正常行驶的两辆大客车上,以0.5 s间隔互相发送字符串信息,检测射频网络信号在行驶工况下的信号强度与丢包率。实验结果表明,在前后车间距150米以下,行驶车速70 km/h左右时丢包率小于3%,信号延迟低于20 ms,信号接收强度稳定。
5)综合实验。
为测试系统的综合性能,本文在实验道路上以前车静止,后车40 km/h以下车速驶向前车模拟公路中两车常见相对车速的追尾碰撞,行驶车速按一定间隔排布,记录发出警报后两车距离以评价系统的综合性能,每一实验车速进行3次实验,最终报警车距取3次实验最小值,预设预警阈值为城市工况预警阈值Ts=3.14 s,实验结果如图11所示。

图11 不同车速下报警距离分布图
可以看出,本系统反应灵敏,对不同接近状况的车辆合理预留了不同的安全距离,从而保证了足够的驾驶员判断空间。
7 结论
本文提出了一种综合机器视觉与无线通信技术的车辆主动防撞预警方法,开发了一种基于无线通信与机器视觉的车辆主动防撞系统平台,首先利用HOG+SVM车辆检测器对前方车辆目标进行实时检测,将检测坐标载入单目测距模型测量相对车距并通过无线通信网络获取相对车速信息,最后将相对车速与相对车距信息导入TTC预警模型实现预警。实验表明,与传统视觉预警方案相比,基于无线通信网络的相对车速获取机制工作更加可靠;与基于DSRC的防撞预警方案相比,本系统机器视觉模块可以采集到更多的行驶信息,拓展性更强。本系统综合了两类预警实现方案的优势,车辆检测率95%、检测速度15帧/s、测距误差小于±4 m,实现了很好的预警性能。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
雷达科学与技术(2021年5期)2021-11-29
商品与质量(2020年18期)2020-11-27
电子制作(2019年19期)2019-11-23
电子制作(2019年24期)2019-02-23
电子制作(2019年23期)2019-02-23
海军航空大学学报(2018年1期)2018-04-25
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
汽车维护与修理(2015年5期)2015-02-28