基于NSET 的鼓风设备故障预警方法∗
2019-07-31 09:55刘峰里满君丰赵龙乾
计算机与数字工程 2019年7期
刘峰里 满君丰 彭 成 赵龙乾
(湖南工业大学计算机学院 株洲 412007)
1 引言
鼓风设备,作为常见的工业设备之一,其设备结构复杂,在生产运行中,因为一些外界因素(环境温度,风速变化等)和内部因素(齿轮磨损、电机超载等)的原因,经常导致鼓风机组发生故障,使得维修和停机成本增大,给企业带来了巨大的经济损失。因此,对设备的各个组件的健康状态进行相关监测,提前对设备故障预测和及时诊断故障就变得十分必要。
目前,针对故障诊断技术方面的研究有很多。如:文献[1~2]采用了BP神经网络对工业设备进行了建模和预测。文献[3]通过小波变换分析方法来处理振动信号。文献[4]应用小波包和包络分析来对轴承做故障诊断。文献[5]使用基于支持向量机的机械故障诊断方法。以上这些文献虽然对工业设备的预测分析都取得了不错的成果,但是都存在一定的局限性。如神经网络、小波变换和支持向量机的方法,对于一些复杂系统,模型非常复杂,建模学习过程耗时长,且这些研究缺乏对数据与数据之间相关性研究,存在较多的不确定因素。针对以上情况,文献[6~7]采用温度趋势分析的方法进行了齿轮箱的状态监测,采用基于相似性原理的非线性状态分析技术(Nonlinear State Estimate Technology,NSET)方法,基于实时数据建立齿轮箱的温度模型,通过观测向量和预测向量之间的残差分析对设备进行故障预测和诊断。本文对NSET模型进行了优化改进,引入聚类分析的概念,利用马氏距离算法思想对过程记忆矩阵D 进行了一定程度的优化,提出采用标准化欧氏距离进行相似度计算,改善了传统方法诊断精度低、速度慢、数据不够直观等缺点。
2 非线性状态估计技术原理
NSET 是Singer 等提出的一种非参数经验建模方法[8],通过选取设备正常运行期间的具有代表性的数据来构建状态模型,然后经过实时数据与历史数据的残差运算对设备进行状态估计。目前已经在核电站传感器校验、设备监控和电子产品寿命预测等方面有了比较好的应用[9]。
2.1 建立模型
对于一个设备或者过程,遵循相关经验选择n个测点来当成这个设备或者过程的相关参数,在i时刻进行数据采集,构成一个观测的向量X(i):

NSET对于用来构建观测向量的历史数据主要要求有如下三点[10]:
1)设备运行时间长;
2)能真正代表设备不同工况(压力、温度等)的正常运行数据;
3)能够全面地包含变量之间相互作用的充足历史数据。
NSET 建模的第一步是构建过程记忆矩阵D,在设备或过程无故障运行的时间里,选择m条能够全部包含不同工况的、具有代表性的历史数据构成过程记忆矩阵D:

2.2 产生估计值
NSET 的输入观测向量为Xobs,由某一个时刻模型中每个变量的值构成,NSET 的输出预测向量为Xest,由样本和权重线性组合产生,对于观测向量Xobs,NSET生成一个m维的权值向量:

得出的预测向量为

为了求解权重向量,模型输入观测向量和输出预测向量之间的残差应该取最小:

为了方便计算,将式(5)转换为残差的平方和:

算出S(ω)对ωk的偏导数:
将式(7)变形得:
式(8)的矩阵行是:

转化为式(9)后:

将式(10)代入式(3):

从式(3)可以看出,如果W存在,则 DT⋅D 在式(10)中必定可逆,并且DT⋅D 的必要不充分条件是过程记忆矩阵D 行阶数大于列的阶数,这在NSET方法中是不可能的。基于以上两点,NSET 方法使用非线性算子⊗来计算不同向量之间的相似度,这是NSET方法的关键,所以Xest表达式可以写成:

在式(12)中,⊗是一个非线性算子,用于替换一般矩阵运算中的乘法,可以用来衡量两个样本之间的相似程度,非线性算子有多种,如欧几里得距离、城市距离、高斯算子、切比雪夫距离、闵可夫斯基距离等[11]。比较常见的就是如下三种:
1)高斯算子

h为滤波系数。
2)城市街区距离

3)欧几里得范数

NSET模型最核心的部分之一就是非线性算子的选择,非线性算子的好坏直接决定了NSET 模型的可靠与否。完成了以上步骤,就来到了最后一步,也是最关键的一步,就是残差分析,就是通过分析残差大小来判断设备是否故障。对于每一个测点可以根据实际物理意义和相关经验规定一个阈值,当某个测点的残差超过阈值时候,就可以认为该测点发生了故障或异常。
3 改进的非线性状态估计技术
模型的成功与否主要跟三个因素有关:模型测点的选择、记忆矩阵的构建和相似性算子的选择[12]。由于模型的测点在采集数据前已经依靠相关经验确定,本文主要针对后两个因素进行了优化和改进,并对记忆矩阵构造优化进行了实验验证。
3.1 确定模型测点
结合专家知识,针对设备的不同,对应的测点也应该不相同,我们将鼓风设备模型分为了16 个测点,涵盖温度、振动、压力三个纬度,当然,NSET作为非参数建模,它对设备的机理模型知识要求不高,见表1。
3.2 过程记忆矩阵优化
过程记忆矩阵D的构建是NSET模型另一个最核心的部分之一,过程记忆矩阵D直接决定了故障预警的准确度,我们需要从设备无故障运行状态的海量数据中选取适当适量的数据来构建记忆矩阵,这些数据要求涵盖鼓风机无故障运行时的全部状态数据,且没有重复和冗余数据录入。过程记忆矩阵中如果状态个数太少,就会导致模型精度低;如果状态个数过多,超过一定的阈值,就会带来巨大的计算量,计算效率下降,还会带来数据冗余,噪声增多。所以,如何选取状态数据就变得非常重要了。在绝大多数参考文献中,都是采用等距抽样的方法来构造过程记忆矩阵,选定数据集中的每一个变量的边界值设定以个固定的步距,按照此步距来数据集中筛选出符合条件的数据构成过程记忆矩阵D,该方法避免了状态参数在小范围内波动[13]。基于等距抽样构造过程记忆矩阵结构图如图1 所示。
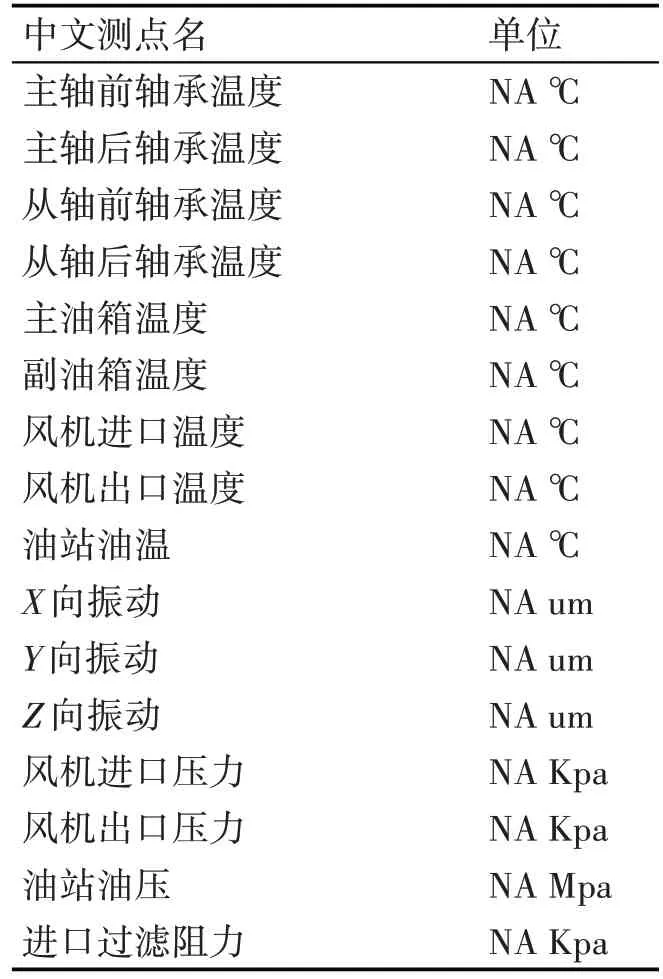
表1 鼓风设备模型测点表

图1 等距抽样过程记忆矩阵构造程序结构图
上图方法虽然在一定程度上对历史数据也进行了提取,但是也有很多缺点,比如等距抽样的随机性很大,没有实际的依据,经过简单处理后,数据的冗余和噪声还是很大。所以,本文引入马氏距离这一算法来去除数据的噪声和冗余,采用马氏距离和等距抽样相结合的方法来构造过程记忆矩阵D。马氏距离(Mahalanobis distance)是由印度统计学家马哈拉诺比斯提出来的,表示数据的协方差距离。其定义如下:

其中,μ 为总体G的均值向量,定义为

马氏距离常用来分类,其原理是:根据已知的分类样本数据,分别计算出不同类的重心极值,然后对任意的观测向量,计算其余每一类中心的距离,然后根据最小距离判别其与哪一类的距离最小以及属于哪一类。所以,观测向量x 与总体G 之间的马氏距离越小,表示他们的关联度越高。反之,观测向量x 与总体G 之间的马氏距离越大,则证明该数据与历史数据的总体特征差别大,关联度小[13]。因此,我们就可以利用马氏距离尽可能得剔除采集到样本的冗余数据,这样过程记忆矩阵的构造就变得更加精准。基于马氏距离和等距抽样相结合的过程记忆矩阵构造结构图如图2所示。

图2 基于马氏距离和等距抽样相结合构造过程记忆矩阵结构图
3.3 相似性算子优化
建立好过程记忆矩阵以后,就可以利用数据对模型效果进行验证了,在验证之前,还需要选择合适的相似性算子。大多数文献中主要使用对测点的测量值进行归一化处理,映射到[0,1]的区间上,然后计算测点之间的距离,计算方法在上文中已经列举出三种。这样做的的弊端就是:其一,归一化后测量值会存在0,这样会对导致结果偏大以及计算时会出错。其二,各个测量点失去了原有的物理意义,进行状态监测时不能直观可视化[14~15]。
根据以上存在的问题,本文引入标准化欧氏距离进行相似度计算,其计算公式如下:

从该相似性算子可以明显看出,两个矩阵之间的相似度与两者之间的距离成正比,相似度越高,则两者标准化欧氏距离越小[16]。
4 基于NEST 原理的鼓风设备状态监测以及故障预测实证研究
4.1 鼓风机相关知识简介
本文研究的数据来自长沙某鼓风机厂,鼓风机型号为 ARE200,机组重量为2800kg,ARE200 罗茨鼓风机数据采集源如图3 所示,鼓风机的转速为730 r/min,风机使用中常出的故障:风量不足、电机超载、过热、异响、润滑油泄漏、振动大等,数据采集时,监测的变量主要有轴承温度、油箱温度、风机进出口温度、轴承振动等。

图3 鼓风设备数据采集源
4.2 NSET模型预测有效性验证
本文实验数据的选取时间区间为2018 年7 月至8 月,期间未出现风机故障和维修的记录。基本可以包含了鼓风机所有正常工作状态,共计12860个,利用这段时间鼓风机的正常状态下的有效历史记录建立NSET 振动模型,用来构造记忆矩阵D,NSET 的基本方法流程图如图4 所示,通过计算观测向量与预测向量的标准化欧氏距离得到残差,作为设备故障与否的判断标准。按照文章前面所提出的改进方法进行过程记忆矩阵D的构造优化,这里设定抽样距离为10 从历史记录中抽取若干个观测向量加入过程记忆矩阵D,得到过程记忆矩阵D的观测向量为1287个,再按照图2方法利用马氏距离的方法对这些向量进行数据刷选,最终选取输入向量Xobs的个数为1000 个,设定NSET 模型预测残差为

风机正常时NSET模型预测轴承振动仿真如图5所示。

图4 NSET方法流程图
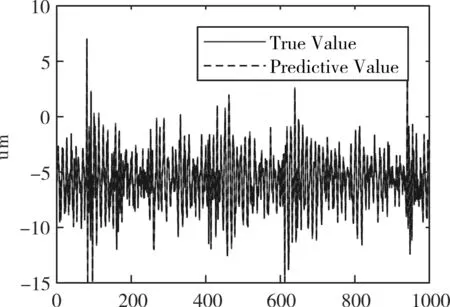
图5 主轴承Y向位移预测值与实际值对比曲线
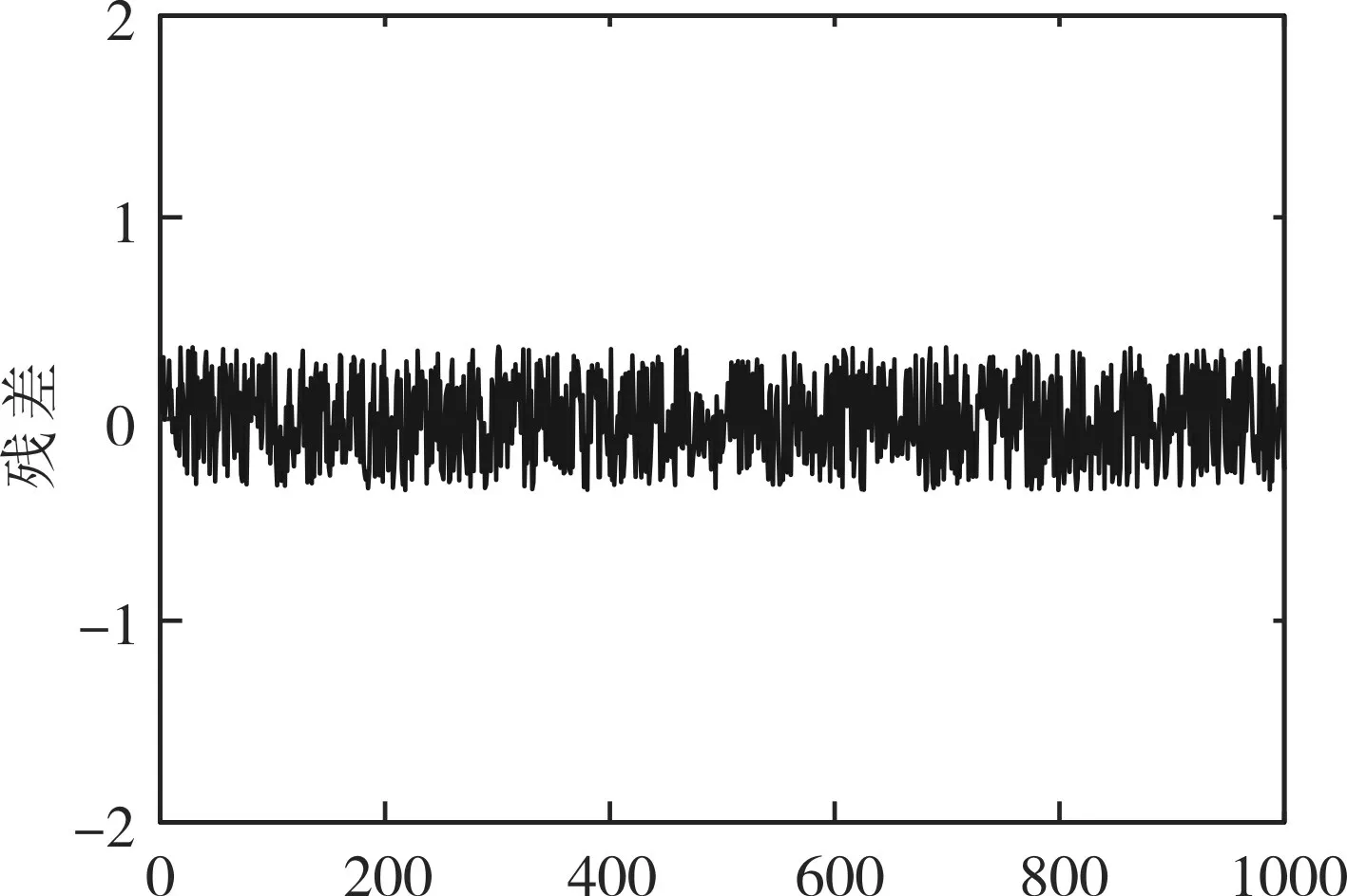
图6 主轴承Y向位移残差曲线
从图6 中可以看出,NSET 模型预测的残差基本都在+0.4以下,相对误差大多都在5%左右,实验证明,与传统方法相比,基于改进方法建模精度较高。接下来我们对故障情况下的预测进行验证,由于故障数据不常有,所以我们人为合成了部分故障数据,用小薄铁片对风机的扇叶进行格挡,收集了一部分数据,其预测结果以及残差如图7~8所示。

图7 主轴承Y方向位移预测与实际值对比曲线
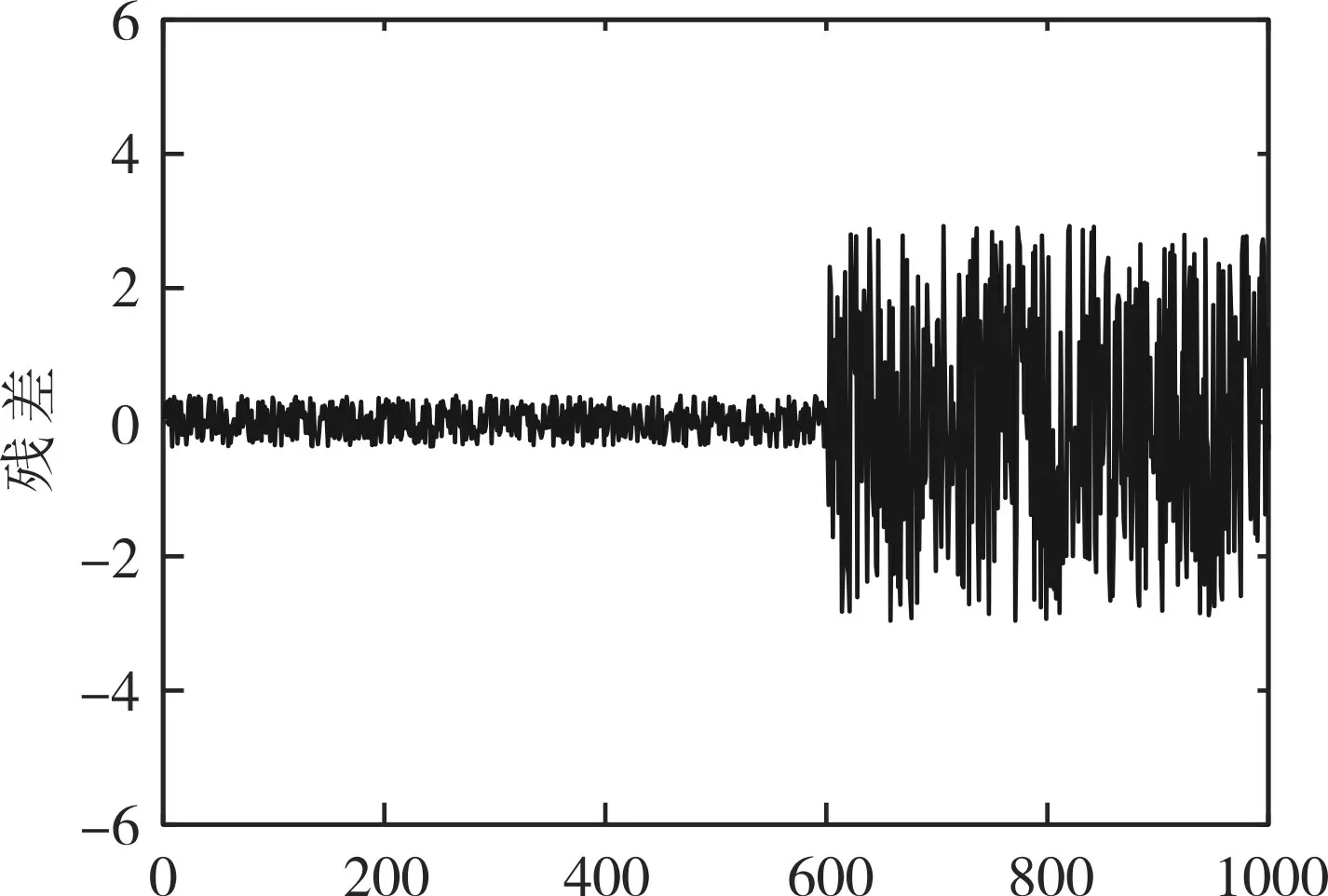
图8 主轴承Y向位移残差曲线
从图8 中可以看出,对之前正常的数据,本方法预测偏差很小,而当发生故障后,预测偏差突然增大,从而也说明了故障的出现,因此本方法能够及时检测出故障的发生,在恶化之前进行预警维修。
4.3 传统方法与改进的NSET建模方法对比
为了体现本方法的优化效果,本文将传统方法与改进后的方法进行了对比实验,采用相同的12860个数据,传统方法记忆矩阵有1287个观测向量,明显多于改进后的方法,依据等距抽样建模结果同样得对1000个向量进行测试,其结果如图9所示。
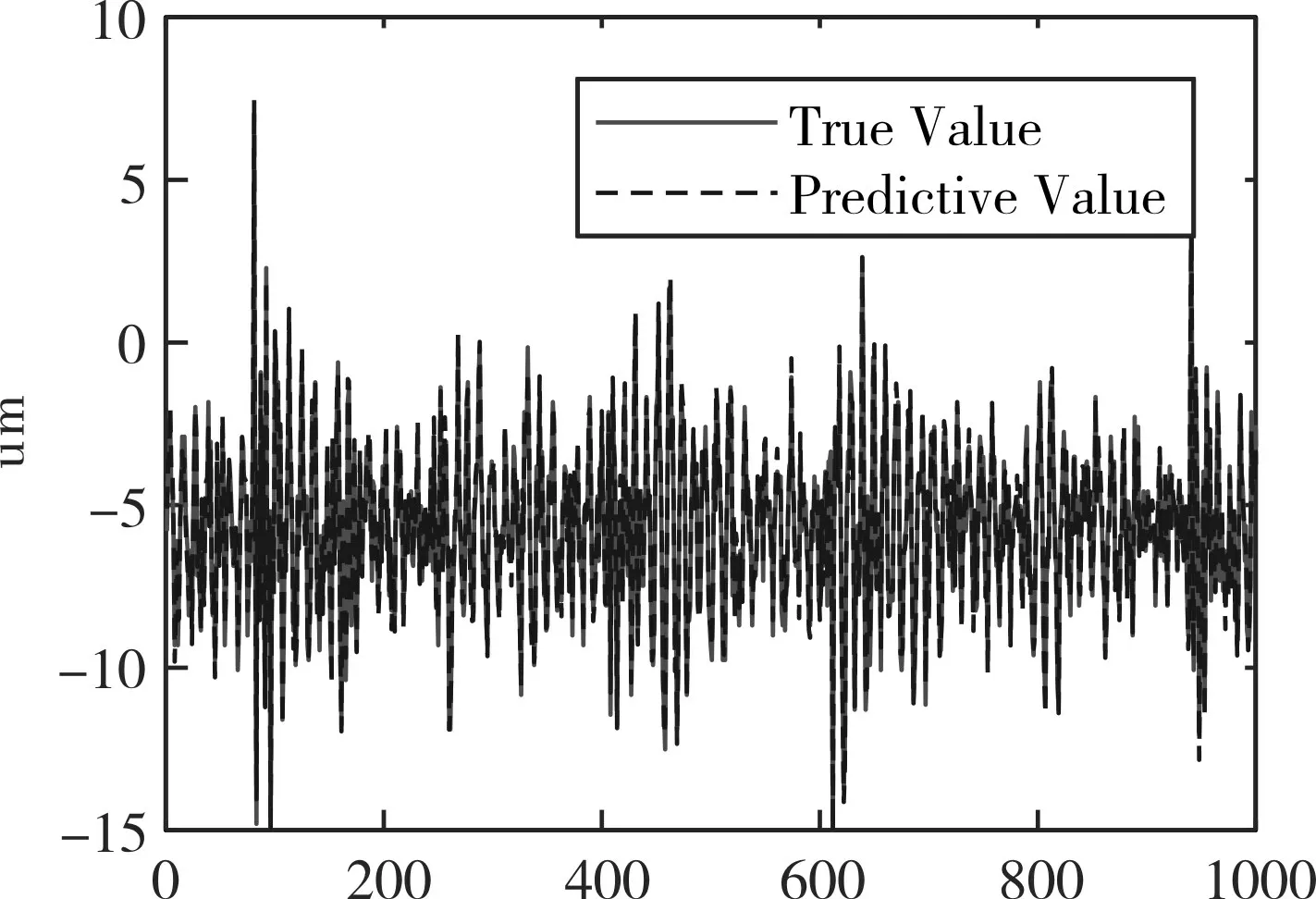
图9 主轴承Y向位移预测值与实际值对比曲线
从图10 可以看出,基于等距抽样的NSET 建模虽然也可以完成风机振动的预测,但是残差在+0.8左右,明显高于改进后的NSET方法。综上所述,本文选取基于等距抽样和马氏距离相结合的建模方法,该方法具有构造的过程记忆矩阵数量少,去噪声,速度快,精确度高的优点。
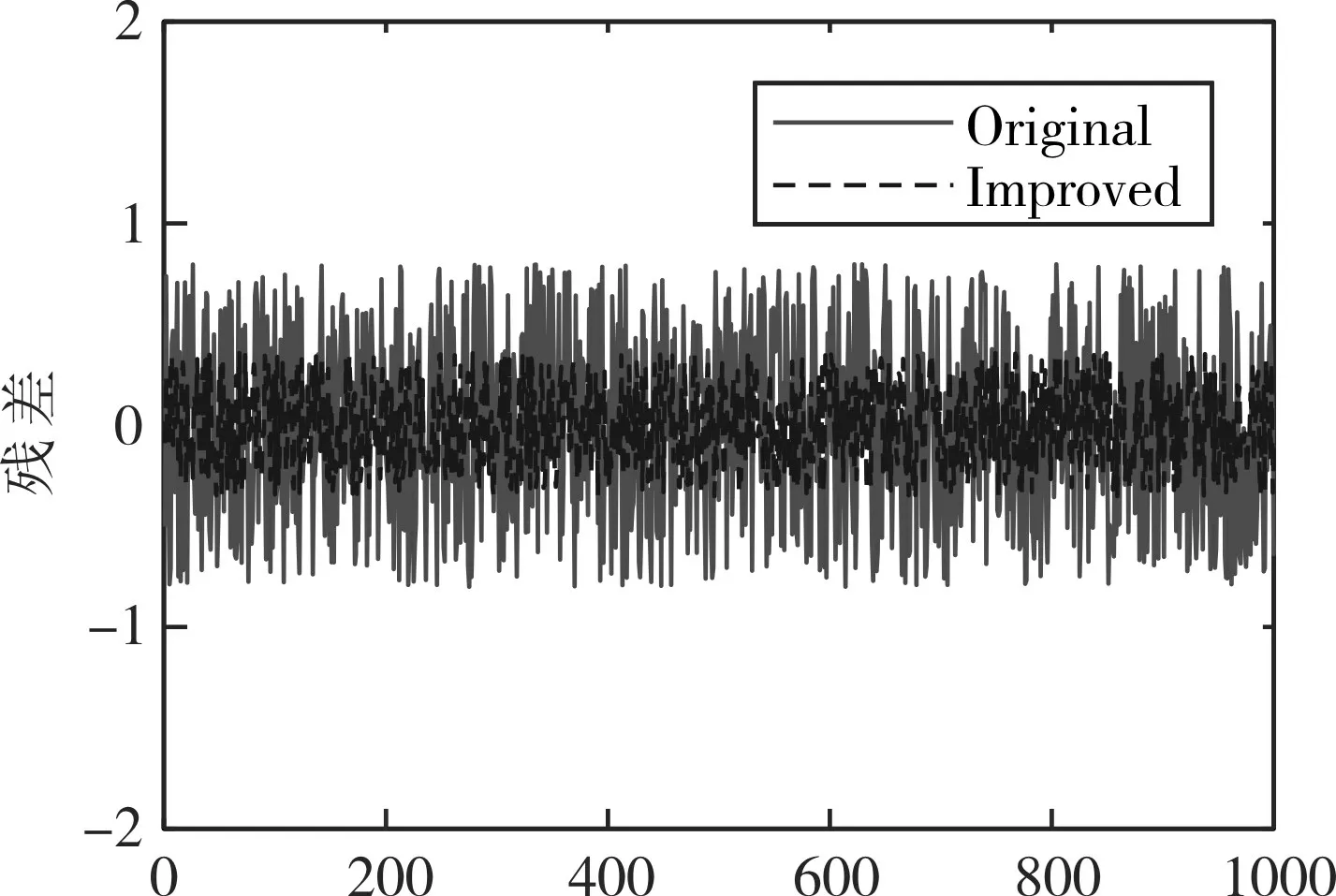
图10 改进前后残差对比曲线
5 结语
本文对NSET 的原理和存在的问题进行了介绍,提出了采用马氏距离和等距抽样相结合的方法进行数据预处理,采用了基于标准化欧氏距离进行模型相似度计算,减少了相对误差,使得数据的状态监测更加直观。构造了过程记忆矩阵的NSET故障诊断方法,并将其应用于鼓风设备的状态监测和预警中。通过风机的海量历史数据,对马氏距离优化的模型进行了有效性验证,并将其与传统NSET方法对比,然后进行残差预警处理分析,论证了模型的有效性,本方法的优越性,改善了传统方法诊断精度低、速度慢、不够直观等缺点。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
网络安全与数据管理(2022年3期)2022-05-23
新高考·高一数学(2022年3期)2022-04-28
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2019年9期)2019-10-26
读与写·教育教学版(2017年10期)2017-11-10
高中生学习·高三版(2016年9期)2016-05-14
新高考·高二数学(2015年11期)2015-12-23
南都周刊(2015年4期)2015-09-10