潜艇对来袭鱼雷报警试验方法研究
2019-08-12 05:53刘建兵
科技与创新 2019年13期
刘建兵
潜艇对来袭鱼雷报警试验方法研究
刘建兵
(中国人民解放军91439部队43分队,辽宁 大连 116041)
潜艇对来袭鱼雷报警是水声对抗试验的重要组成部分。根据某潜艇设计鉴定试验的需求,结合实战背景,在充分考虑潜艇、鱼雷的战术技术指标以及靶场现有的装备技术基础上,运用鱼雷反潜战术理论和试验模拟方法,对实航鱼雷报警试验方案进行了分析研究,以期对试验提供理论参考。
潜艇;鱼雷报警;模拟器;试验方案
1 引言
只有潜艇及时发现来袭鱼雷,才能有效地为作战系统提供战术信息,快速地作出机动或使用对抗器材方案,确保潜艇的生存力和战斗力。对来袭鱼雷的报警试验方法的正确与否,将直接影响本艇的作战效能,因此,研究对来袭鱼雷的报警试验方法,成为水声对抗鉴定试验的重要组成部分。
潜艇声纳探测来袭鱼雷是通过噪声谱分析来判断的。应用鱼雷进行水声对抗试验,鱼雷条次有限,试验前很难作出准确预测。应用等效鱼雷噪声模拟器进行鱼雷报警,不仅可以确保试验安全,也可为实航鱼雷报警试验提供理论依据。
2 试验原理
2.1 鱼雷报警原理
试验时,潜艇按试验航路等速直航,GPS或水下长基线定位系统完成潜艇定位:水面舰艇或反潜直升机按实际作战要求(鱼雷的初始搜索弹道为直航或蛇行,鱼雷主航向应满足鱼雷实战射击要求)发射鱼雷,水下武备弹道测量系统完成鱼雷全航程弹道测量。当潜艇准确识别出鱼雷时,鱼雷与潜艇的距离就是声纳对鱼雷的报警距离。鱼雷报警机动方案如图1所示。
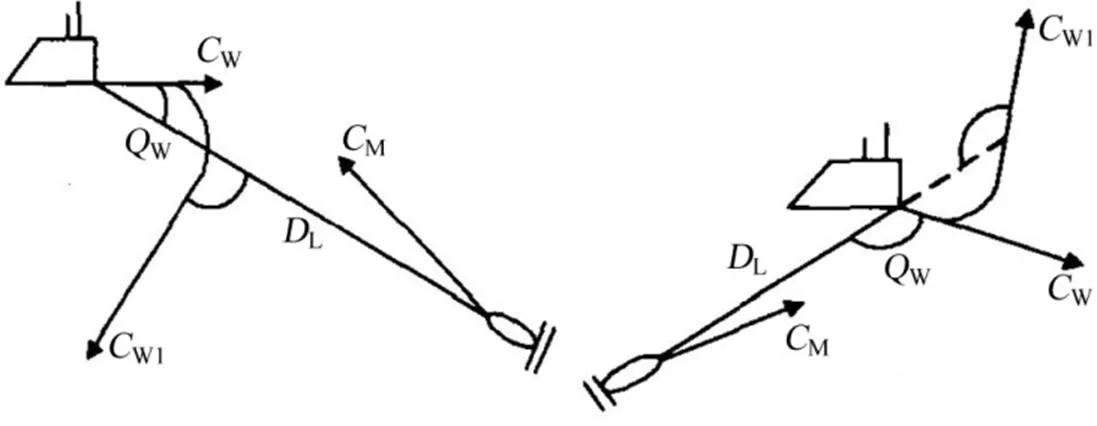
(a)小舷角报警方案 (b)大舷角报警方案
2.2 模拟报警试验原理
鱼雷噪声模拟器具有模拟鱼雷入水、点火、启动到变深、搜索、追击等全航程辐射噪声,通过鱼雷噪声强度的控制,能够模拟鱼雷由远到近的运动噪声特性变化。试验时,模拟器按直航鱼雷射击三角形设定相关试验参数,包括潜艇航速、初始舷角、模拟器与潜艇的初始距离、鱼雷与潜挺的初始距离、雷速、发射提前角等。潜艇按试验要求以一定航速向靶船方向运动,模拟器按模拟试验航路发射等效鱼雷噪声。当潜艇探测到模拟器发射的鱼雷噪声时,计算出潜艇与模拟鱼雷之间的距离,即来袭鱼雷报警距离。
3 鱼雷报警方案
3.1 直航鱼雷试验方案
根据鱼雷命中原理,直航鱼雷满足射击三角形,命中概率最大。鱼雷射击三角形如图2所示。
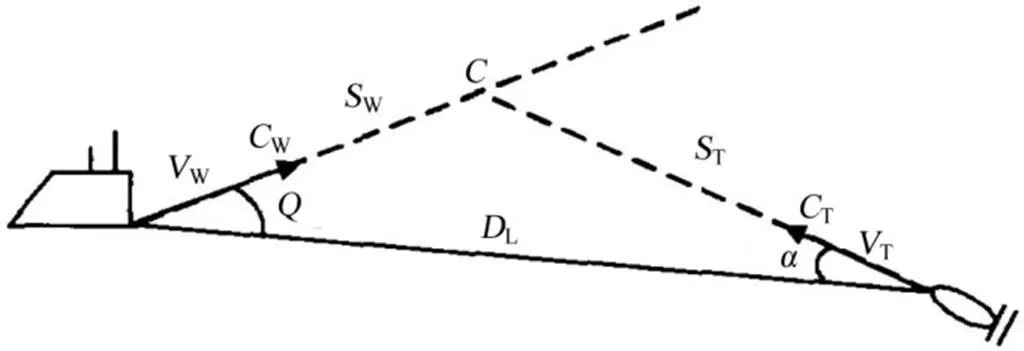
图2 鱼雷射击三角形示意图
由图2可知,当鱼雷和目标匀速直航时,命中目标条件为w/T=w/T。
根据正弦定理,鱼雷发射提前角=arcsin[(w/T)sin]。试验时,潜艇按试验要求的航路、航速、潜深航行,鱼雷载体(水面舰艇或直升机)按直航鱼雷射击三角形发射鱼雷。当潜艇声纳准确探测到鱼雷目标时,转向上浮并进入下一个航次试验。试验过程中的潜艇定位和鱼雷弹道测量由水下长基线定位系统和水下武备弹道测量系统完成。这种试验方法的最大优点是潜艇声纳对来袭鱼雷的报警距离接近海上实战背景,缺点是试验风险高。
3.2 自导鱼雷试验方案
直航鱼雷射击是鱼雷与目标相遇时的正常射击提前角。自导鱼雷可获得目标最大发现概率,自导鱼雷命中目标的首要条件是目标与鱼雷的相对位置必须在鱼雷自导装置有效作用范围之内。自导鱼雷试验方法与直航鱼雷相似,但鱼雷搜索的主航向不是按正常提前角发射,而是按最优提前角发射。根据正态分布概率密度的单峰性和对称性,当鱼雷左、右极限搜索角相等时,鱼雷发现目标概率最高,此时,自导鱼雷的射击提前角为最优提前角a。
自导鱼雷射击如图3所示。
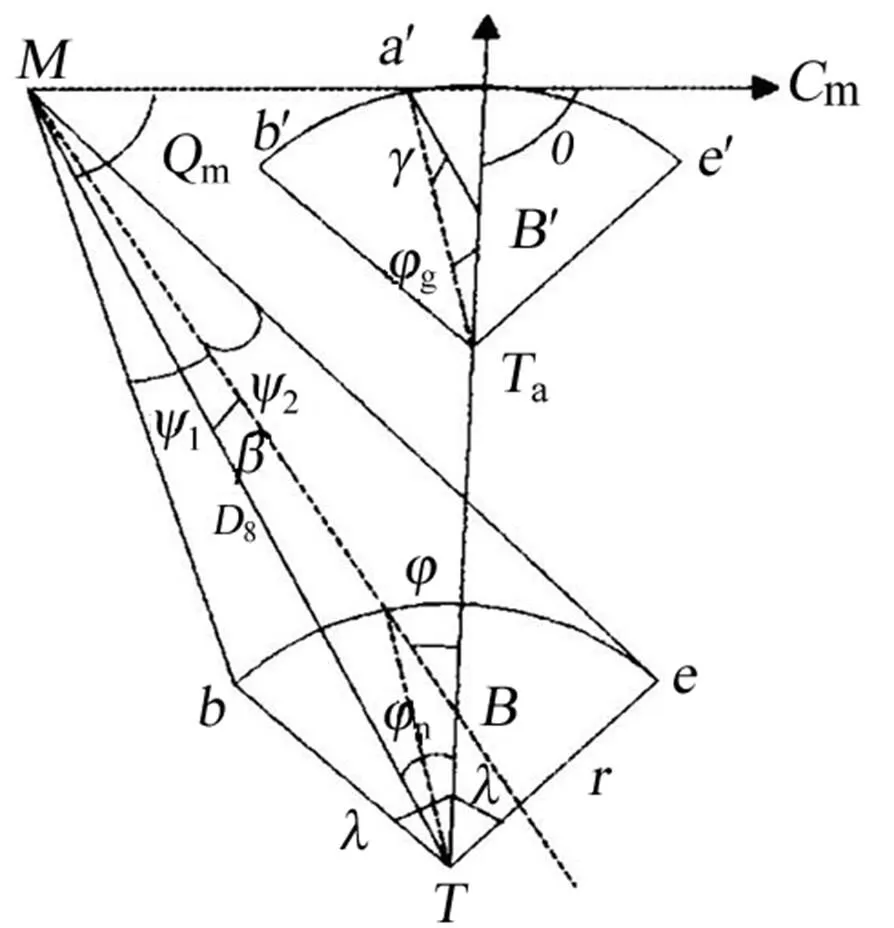
图3 自导鱼雷射击示意图
根据自导鱼雷射击原理,当1=2时,自导鱼雷发现目标概率最大,其发射提前角表达式为:
a=sin-1[sin(d-)]-
=-1[(msind)/(s+mcosd)]
=(120/π´)sinπ´
自导鱼雷发射提前角试验如图4所示,点为潜艇,点为攻击舰,f为发射鱼雷时发射管与发射舰舰艏艉线的夹角,为鱼雷转角,为鱼雷发射提前角。
图4 自导鱼雷发射提前角试验示意图
试验时,假设潜艇在点以航向M、航速6 kn潜望航行;舰艇选定鱼雷射击阵位点,航速18 kn、航向为70°。测出潜艇舷角d为42°,舰艇舷角W为122°。按上述参数计算,自导鱼雷最优提前角10.2°。而鱼雷发射管与舰艏艉线夹角为±45°时才能正常发射,因此发射前,需要转舰瞄准,并与鱼雷转角0°、±35°、±70°配合,在攻击舰转向角的情况下,使鱼雷获得正确的航行方向。
3.3 可行性与风险分析
实航鱼雷报警试验如果结合水声对抗试验进行,就必须考虑试验潜艇的安全性。试验安全设计可以从两方面考虑:①控制鱼雷航深,使鱼雷航行深度与潜艇航行深度保持一定的深度差;②通过鱼雷动力燃料的添加量来控制鱼雷最大航程,使鱼雷的航行终点与潜艇保持一个安全距离。
有了鱼雷航程和鱼雷航深的双保险控制,完全可以保证试验潜艇的安全。
4 模拟鱼雷报警试验方案
4.1 静态鱼雷模拟噪声试验
静态试验是模拟器发射等效鱼雷噪声,噪声强度不变。潜艇以一定航速向靶船靠近,鱼雷噪声模拟器连续发射标准鱼雷噪声信号,当潜艇探测到鱼雷噪声信号时,潜艇与试验船的距离即为鱼雷报警距离。这种试验方法,系统不需要设定航路参数,海上实施和测量也比较方便。静态试验模拟态势如图5所示。
图5 静态试验模拟态势图
4.2 运动鱼雷模拟噪声试验
运动鱼雷模拟试验是模拟器按鱼雷运动航速发射噪声,信号强度随距离不断增强。模拟器按直航鱼雷射击三角形设定相关参数,包括潜艇航速、目标初始舷角、初始距离、雷速、发射提前角等,潜艇按试验航路航行,模拟系统模拟
“雷-艇”运动态势如图6所示,并按直航鱼雷射击三角形发射等效鱼雷噪声。当潜艇探测到鱼雷噪声信号时,结束本航次试验,转入下一个航次试验。
图6 “雷-艇”态势示意图
模拟目标舷角为30°的试验航路。潜艇与模拟器的初始距离为6 000 m、初始舷角(即模拟器相对声纳的舷角)为30°;当潜艇以6 kn航速匀速航行,模拟器模拟初始距离L0为6 500 m的鱼雷运动时,经仿真计算,鱼雷正常射击提前角应为3.6°。按照上述航路参数进行试验,潜艇和鱼雷从试验初始距离到指标规定距离范围内,声纳实测目标方位与实航鱼雷相比较最大方位误差小于1.8°,是理想的动态试验模拟航路。
模拟目标舷角为60°的试验航路。当目标初始舷角为60°时,经仿真计算,模拟鱼雷的射击提前角应为6.8°,在鱼雷报警距离指标范围内声纳实测目标方位与实航鱼雷方位误差小于3°,可以作为理想的试验航路。
5 结论
鱼雷报警是水声对抗试验的重要项目。本文运用鱼雷反潜理论、水声理论以及模拟器仿真技术,论证了鱼雷报警试验方法。可以得到以下结论:①为了保证试验效果和试验安全,在实航鱼雷试验前先由模拟器进行模拟试验,有助于提高声纳对来袭鱼雷的识别能力,以降低试验风险、提高试验成功率;②实航鱼雷试验条次有限,试验样本不足,用鱼雷噪声模拟器进行必要的补充试验,有利于鱼雷报警试验结果分析,从而得出合理的试验结论;③本文研究成果可直接应用于某型潜艇水声对抗试验,有较高的工程应用价值。
[1]杨榜林,岳全发.军事装备试验学[M].北京:国防工业出版社,2002.
[2]王树宗.自导鱼雷战斗使用与论证基础[M].武汉:海军工程大学出版社,1986.
[3]杨福渠,张新华.单舰反潜[M].大连:海军大连舰艇学院出版社,2000.
TJ630
A
10.15913/j.cnki.kjycx.2019.13.021
2095-6835(2019)13-0049-02
刘建兵(1978—),男,本科,工程师,主要从事鱼雷总体及其动力系统专业、水中兵器装备保障性方面的研究。
〔编辑:张思楠〕
猜你喜欢
文萃报·周二版(2022年24期)2022-06-16
汽车实用技术(2022年5期)2022-04-02
故事作文·高年级(2021年4期)2021-05-06
少儿科技(2021年4期)2021-01-11
读者·校园版(2020年12期)2020-06-19
兵器知识(2020年2期)2020-03-20
文萃报·周二版(2019年46期)2019-09-10
创新时代(2017年10期)2017-11-09
军事文摘(2016年8期)2016-08-11
青年文摘·上半月(1984年10期)1984-11-01