一种基于系留无人机的图像遥测系统设计
2019-08-31 07:58周述勇
宇航计测技术 2019年4期
汪 洋 沈 力 周述勇
(1.中国人民解放军92941部队,辽宁125001;2.航天工程大学,北京101416;3.北京无线电计量测试研究所,北京100039)
1 引言
图像遥测系统的主要功能是完成视频信号的远距离传输任务,可广泛用于指定区域的远程监控。该系统通过图像采集装置完成信号的采集,随后进入遥测装置中完成信号的编码、调制、功放和发射,再通过地面遥测站对信号进行接收、解调、解码后获得图像数据,从而完成对指定区域远程实时监控和长时间大容量存储的任务。随着摄录设备的小型化、轻量化,将高性能的摄像机安装于无人机可变为现实[1]。本文介绍一种基于系留无人机的图像遥测系统设计,该系统的特点是将图像采集装置和遥测装置安装于水面船舶的系留无人机上,可完成对船舶甲板全区域的监控覆盖,有着广泛的应用前景。
2 系统组成
为全方位对船舶甲板情况进行监控,可在船头或船尾通过系留方式安装无人机,无人机的有效载荷为图像采集装置和遥测装置,为保证图像稳定可增加云台,无人机飞行高度应结合视场要求和摄像头焦距等指标进行设计,系统组成如图1所示。
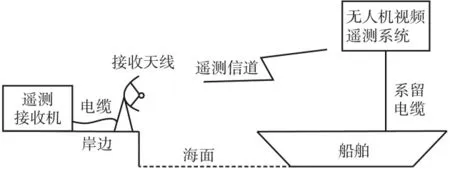
图1 图像遥测系统组成框图Fig.1 Composition of image telemetry system
2.1 硬件组成
无人机图像遥测系统由无人机平台、图像采集装置(IP摄像头、云台)、遥测装置(遥测编码器、发射机、天线)、电源转换装置(油机、系留电缆、电池、脱落插头及转换装置)、遥测接收机(接收天线、接收通道、解调与数据处理)等组成。无人机为图像遥测系统提供搭载平台,并与地面进行控制通信,无人机及其载荷通过系留电缆供电,无人机下安装图像采集装置和遥测装置,该两种设备为无人机有效载荷,为便于携带挂机,应对两种设备进行一体化设计安装。位于无人机下的IP摄像头因获得了较大的视场,所以只需一路即可,该路摄像头采集的图像经压缩后直接通过网线接入遥测编码器,遥测编码器形成PCM码流,最终的PCM码流送至发射机和天线进行PCM-FM调制、放大和发射。岸边的地面遥测站接收信号,信号解调后分选图像数据,并进行解压缩处理,获取该路摄像头的图像信息,可进行实时播放并存储,系统硬件组成如图2所示。
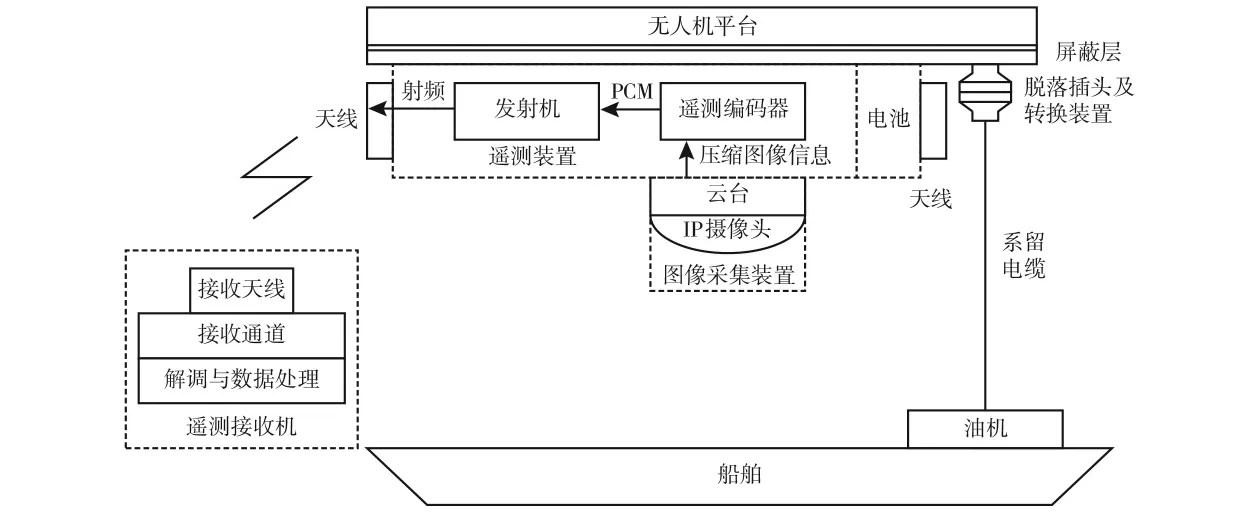
图2 硬件组成框图Fig.2 Hardware composition
2.2 软件组成
系统软件分为IP摄像头软件、遥测装置软件、遥测接收机软件、播放软件等四部分,摄像头的图像压缩协议采用MPEG-4协议,压缩倍数根据图像质量的不同,压缩倍数不同,一般情况下约为60~90倍,该协议通常集成于网络IP摄像头内。
摄像头网络数据传输协议按照ONVIF协议标准进行编写,遥测装置根据协议的要求获取摄像头数据,通过遥测信道编码传输后解调数据,再根据ONVIF协议还原出数据进行播放,软件组成如图3所示。
3 关键设备设计
图像遥测系统的关键设备包括IP摄像头、无人机平台、遥测装置及电源转换装置等,下面将对关键设备设计进行介绍。

图3 软件组成框图Fig.3 Software composition
3.1 IP摄像头参数设计
IP摄像头采用CMOS成像传感器,与CCD相比,CMOS器件具有功耗低、集成度高等优点[2]。CMOS摄像头采用可变焦设计,以备在突发状况时可对特定区域进行更为清晰的成像,从而为远程人员提供应急处置的判断依据。假设甲板长度为180m,宽度20m,无人机悬停高度为100m。为完整覆盖监测区域,感光芯片对角线尺寸选定为16mm,焦距范围为(8~128)mm,此时摄像头监测区域为(12.5~200)m,即可覆盖200m甲板的长度,又可对最小12.5m范围进行详细监测,几何示意图如图4所示。

图4 摄像头焦距分析Fig.4 Camera focal length analysis
对于无人机载的遥测系统,由于视场很宽,要达到一定的分辨率,必须采用高清摄像头,可采用1280×960 的分辨率,帧频 60Hz[3],对 180m 的视场,分辨率能达到60mm,采用TPC编码后,此时遥测装置数据率约为9.5Mbps。图像传输的网络接口为RJ45、支持10M/100M网络数据,防护等级IP66,产品重量小于1.5kg。若遥测频段内有2个频点可以应用,则可采用2个低码率的通道进行传输,从而增大作用距离,以无人机载设备为例,可采用2个5Mbps的通道进行传输。
3.2 无人机平台功能设计
无人机主要负责空中搭载任务,因此其载重量和稳定性至关重要,并且在满足使用需求的前提下,应尽量避免功耗的浪费。无人机的载荷包括图像采集装置、遥测装置、电池、系留电缆等,其中,图像采集装置、遥测装置、电池的总重量为13kg,而系留电缆是船舶为无人机进行供电的设备,电缆的重量与无人机旋翼拉力的功耗成正比,即当供电电压一定时,功耗越大、电流越大、电缆直径越大、电缆越重。另外,为应对海上复杂气候,应选用抗风能力较强的八旋翼无人机,该类型无人机采用直流电动机,拖动系统易于稳定运行,通过遥控器的控制可将无人机可悬停在100m高度。
系留电缆的额定电流及自重见表1,使用10AWG输电线较为合适,该线缆由正负两根线组成回路,在100m高度时,输电线的重量为66×2×100=13200g=13.2kg,因此载荷总重量是13+13.2=26.2kg,无人机额定40kg的载重量可以满足26.2kg的需求,此时经过输电线的电流约为75A,也满足系留电缆的额定要求。
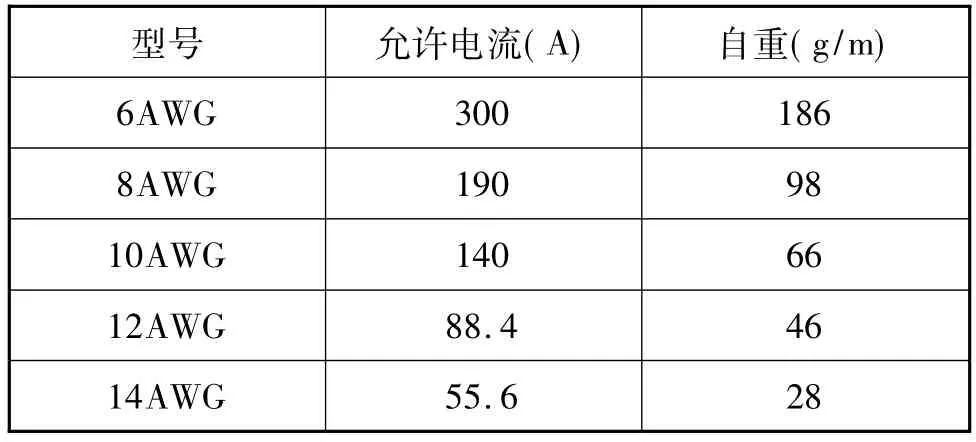
表1 系留电缆的额定电流及自重Tab.1 Rated current and deadweight of the tethered cable
无人机的基本参数分为机架参数和飞行参数,机架参数包括对称电机轴距1800mm、单臂长度650mm。飞行参数包括直流供电电压50V、机身自重12kg、最大载重重量40kg、最大功耗5kW、最大垂直上升速度6m/s、自动巡航速度(6~10)m/s、最大平飞速度15 m/s、抗风能力最大5级(8.0~10.7)m/s、工作极限温度 -20℃ ~+55℃、存储环境稳定 -20℃ ~+65℃。无人机有效载荷重量估计表见表2。
因电缆使用环境为海上,因此应注意海风和潮湿对电缆的腐蚀,在选用时电缆质量等级至少为适应海上作业环境的工业级产品,并且能承受一定的拉力,在电缆两端连接处注意防护,增加转弯半径并留有一定余量,确保在晃动时能避免额外受力、磨损或脱落。
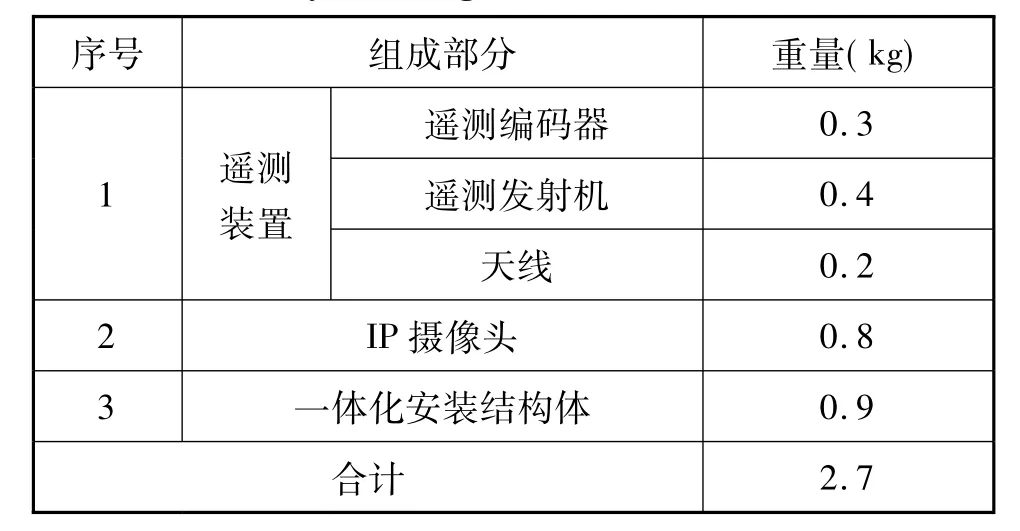
表2 无人机有效载荷重量估计表Tab.2 Payload weight assessment of the drone
3.3 无人机平台安全性设计
由于无人机飞行高度高自重大,为保证甲板人员和设备的安全,需要对平台的安全性进行充分设计,采用不断优化的智能算法。同时,无人机控制信号、导航信号、遥测信号容易被干扰和截获,因此还应加强物理层和MAC层的协议和策略[4]。
无人机飞行到指定高度和区域后会进行悬停操作,此时无人机会根据风速和气流变化适当调整位置和姿态,同时无人机接收的卫星导航信号也辅助控制系统进行判断。无人机可能会受到压制式干扰和欺骗式干扰[5],为避免无人机的控制信号受到欺骗式干扰,控制信号应采用扩频通信方式,即使用扩频序列、频率跳变、时间跳变等方式来提升信号抗干扰能力,扩展信号频谱使有用信号淹没在噪声之下不易被侦测到[6]。当无人机的控制信号受到压制式干扰,飞行控制软件应以卫星导航信号和惯性导航信号作为信息主要来源,并按照预定程序正常执行,在任务完成后自动降落至甲板。当卫星导航信号受到压制式或欺骗式干扰时,飞行控制软件应以人工控制和惯性导航信号作为信息主要来源[7],软件中可采用卡尔曼滤波法对飞行器的位置和姿态进行预测,根据各类干扰环境,逐步对算法进行优化[8]。同时,无人机的控制信号和遥测装置的信号应在收发端使用加密芯片来进行保密。
3.4 遥测装置设计
3.4.1 遥测体制选择
目前国内较为常用的遥测体制包括PCM-FM,PCM-QPSK,PCM-BPSK等,下面结合具体使用环境和参数选择进行比较。
从抗多径衰落的能力进行分析。多径衰落问题在通信系统中非常普遍,尤其是海面环境比陆地环境还要严重数倍,将对接收系统产生不良影响。多径衰落产生原因是发射信号经过不同路径到达接收机,变化的相位产生了叠加,导致最终的接收信号出现幅度衰落[9]。PSK通过鉴相获得信息,因此受多径影响较大,而FM通过前后相位的相对关系获得信息,因此受多径影响较小。因此,PCM-FM体制在抗多径衰落方面具有优势,更适用于海面环境的遥测任务。
从信号传输带宽能力进行分析,PSK比FM更易传输较大带宽的信号,目前的移动通信中一般采用8PSK、QPSK的调相的方式进行传输,可支持数百兆的信号带宽,但常规遥测系统一般只需10MHz以下码速率,PSK的优势并不能体现出来,FM足以满足使用要求。另外,从信号自身占用带宽进行分析,在相同码速率情况下,以占有99%以上信号能量带宽为考量,FM约为1.16倍码速率带宽,而PSK约为1.5倍码速率带宽,由此可见FM频谱更加集中,因此接收机在进行接收时,中频滤波带宽可以更窄,从而使得FM的接收灵敏度更高一些(现有接收机FM灵敏度较PSK高1dB),尤其当多通道遥测的使用环境下,FM抗通道间干扰的能力更强。
综上所述,PCM-FM体系具有较强的抗多径衰落能力、较高的接收灵敏度、较好的多通道适应性、较简单的实现方式且满足遥测信息传输速率,因此适合应用于本系统。
3.4.2 编码器与发射机设计
遥测装置编码器采用数字调制方式,内部使用Z7系列的FPGA作为控制器,内部集成2颗ARM9内核,具备硬件的网口,可实现对摄像头的数据读取。同时,使用AD9957作为数字信号合成器,可实现对调制模式的软件控制,对发射频点在(2 200~2 300)MHz之间的自由设置。其主要功能包括:接收网口数字量信息、按照帧格式插入到PCM码流中、数字可编成的TPC信道编码。遥测发射机采用数字合成进行调制信号,将调制后的射频信号上变频至S频段,并进行双路5W功率放大[10]。遥测装置还应将接收到的遥测电源28V进行二次电源变换,提供遥测装置内部使用的±12V,±5V等电源的功能。其重量约为0.8kg,功能框图如图5所示。
3.4.3 遥测天线设计
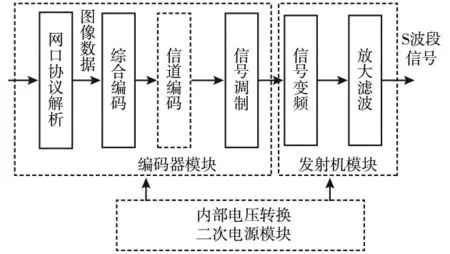
图5 遥测编码器和发射机功能框图Fig.5 Telemetry encoder and transmitter composition
天线设计需考虑使用环境、覆盖区域、频率范围、增益大小等。海面环境下多径衰落对于水平极化方向影响较大,但对垂直极化信号影响较小,因此天线采用垂直线极化方式。为实现方位360°、俯仰-20°~60°的区域覆盖,可采用两个180°全向微带天线组合而成,天线形式为振子,带宽100MHz,增益在(-3~+5)dB之间,重量小于0.2kg。
3.5 电源转换器设计
电源转换器实现从柴油发电机输出电压到无人机动力电压以及机载设备电压的转换,为减小传输电缆的重量,无人机和机载设备采用同样的电压,因此要求机载设备使用能够兼容(20~50)V供电电压的宽电压DC/DC模块。无人机电机耗电量较大,此时系统输出功率约为5000W,电源转换器体积约为300mm×150mm×50mm。同时,还需增加50V的10000mAh的锂电池,保证无人机载系统在供电电缆切断后或意外中断后能有6min时间正常起降。无人机有效载荷经DC/DC转化后采用+24V电池供电,在装置内部实现电压的二次变换,其中遥测编码器采用+5V供电,遥测发射机采用+10V供电,摄像头采用+12V供电,表3是各部分的功率需求。若考虑二次电源的转换效率为75%,则功率需求约为44.1/0.75=58.8W,若采用24V电源供电,则电流需求为58.8/24=2.45A,无人机有效载荷功耗见表3。除此之外,还需要增加系留电缆供电与电池供电转换装置,该装置用于地面供电与机载电源供电的转换,采用8个继电器分别对8个电机供电进行控制。继电器由地面电源控制,而继电器开关连接在电池供电回路中,如图6所示。无人机开始工作时由地面线缆通过脱落插头给电机供电,同时也驱动继电器线圈使得继电器断开(继电器采用常闭触点),当工作完成转入电池供电时,采用控制电磁解锁或机械力解锁的方式进行解锁,将线缆与无人机脱落插头脱开,地面供电中断,继电器恢复常闭状态,此时由机载电池接通供电,在6min时间内完成无人机降落。

表3 无人机有效载荷功耗估计表Tab.3 Drone payload power consumption
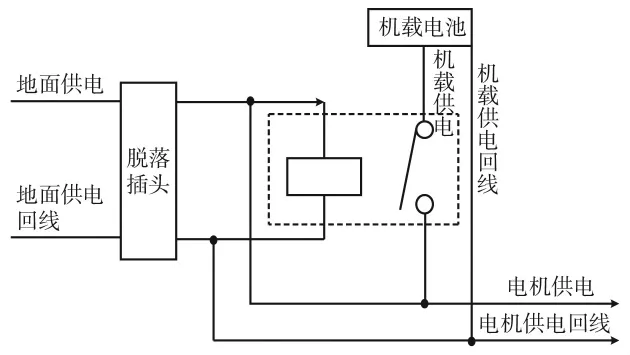
图6 系列供电与电池供电转换装置Fig.6 Power conversion device
4 系统综合性能分析
4.1 遥测距离分析
4.1.1 不考虑地球曲率的遥测距离分析
由信号传输公式可得,接收机灵敏度为

式中:Smin——接收机灵敏度;Pt——发射功率;Gt——发射天线增益;λ——信号波长;Gr——接收天线增益;R——传输距离;L——多径、遮挡等带来的信号损耗。
假设传输码速率约为10MHz,根据实际选用的产品指标可知:Smin=-122dBW,Pt=5W,Gt=4dB,λ =1/2250=0.1334m,Gr=26.4dB,L=9dB(海面情况典型值),则10logR=59.95dB,R≈100km。
若采用2个遥测频点进行传输,传输码速率约为5MHz,根据实际选用的产品指标可知:Smin=-125dBW,Pt=5W,Gt=4dB,λ =1/2250=0.1334m,Gr=26.4dB,L=9dB(海面情况典型值),则10logR=61.45dB,R≈140km。
若采用MSD+TPC编码的方式,以上两种情况的R可进一步增大,作用距离见表4。

表4 作用距离情况表Tab.4 Working distance
4.1.2 考虑地球曲率的遥测距离分析
遥测装置采用无人机载方式,发射天线高度为100m,考虑地球曲率的影响,作用距离约为96km。由表4的分析可以看出,4种码速率方式都可以达到最远使用距离。若要进行更远距离的图像遥测,可增加无人机中继,若无人机高度为100m,则每增加一个中继点,距离可增加约70km。
在96km作用不变情况下,由于接收机灵敏度的变化,使得4种方式获得信息的误码率见表5。
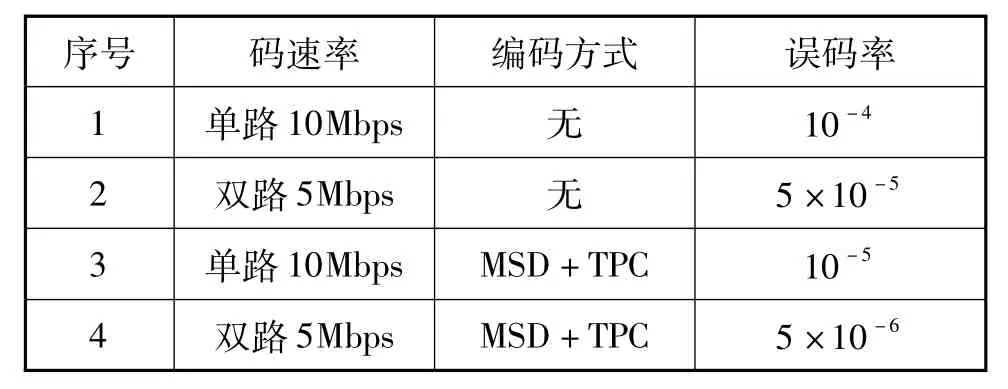
表5 接收误码率统计表Tab.5 Receive error rate statistics
4.2 图像数据延迟分析
图像延迟的总时间是各分系统延迟的总和,在网络传输时,误码率过大等易造成数据的重法,数据延迟时间约为几十个时钟周期,采用100M网时,延迟时间不超过1ms。在进行图像压缩时,要进行帧间预测,同时随着图像质量的不同,压缩后数据的数据量变化,而100M网的传输速率为数据量的10倍,缓存可以较小,目前设置为10帧,以60Hz的帧频计算,延迟约为16ms。遥测组帧延迟不超过一个帧周期,约为5ms。其它延迟包括芯片信号处理延迟和线缆延迟等,因此系统整体延迟合计小于25ms。
5 结束语
本文介绍的基于系留无人机的图像遥测系统设计方案,为甲板图像监控提供了一种通用的方法,该方法已经过实际验证,可行有效,回传的图像清晰的显示了甲板上作业情况。根据自身测量需求,可调整摄像头的分辨率、焦距,无人机的载重量,遥测装置的功率、通道数量、信号编码方式、信号调制方式等,最终可以实现对船舶甲板进行全方位、远距离、长时间、实时监控。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
军事文摘(2021年16期)2021-11-28
建材发展导向(2021年14期)2021-08-23
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
作文·初中版(2017年11期)2017-09-14
领导决策信息(2017年12期)2017-05-17