非均匀噪声环境下分布式IVI-CFAR检测算法
2019-09-05 10:44王陆林刘贵如李志玲
重庆邮电大学学报(自然科学版) 2019年4期
王陆林,刘贵如,邹 姗,李志玲
(安徽工程大学 计算机与信息学院,安徽 芜湖 241000)
0 引 言
在雷达目标检测过程中,如果回波信号中有噪声、杂波干扰和目标干扰信号时,要实现恒虚率(constant false alarm rate,CFAR)警检测就变得非常困难[1-2]。杂波等干扰信号的功率是随机的,无法预知,所以固定检测门限会导致大量的虚警或者检测率严重下降,在实际应用中无法使用[3-4]。CFAR检测算法是在雷达检测领域应用较为广泛的一种检测技术,它通过估计待检测参考单元周围相邻参考单元的功率得到背景噪声功率估计值,然后再乘以比例系数得到功率检测门限[5-6]。其中,基于平均功率和有序统计方法的CFAR检测使用最为广泛。单元平均恒虚警(cell averaging constant false alarm rate, CA-CFAR)检测器[7]、最大选择恒虚警(greatest of constant false alarm rate, GO-CFAR)检测器[8]、VI-CFAR(variability index constant false alarm rate, VI-CFAR)检测器[9-10]均依赖于先验知识即背景噪声、杂波和多目标干扰的分布情况。但在实际应用场景中,背景噪声功率分布是不确定的,有时无法得到先验知识,不能保证较稳定的检测性能。
有序统计恒虚警率(order statistic constant false alarm rate, OS-CFAR)检测器[11]在多目标干扰环境下具有较佳的检测性能。而在实际工程应用中,背景噪声环境是随机的,无法预知的,如果采用单一的CFAR检测器,有时会导致检测性能严重下降。面对复杂的检测环境和苛刻的系统需求,在保持较低虚警率的前提下,要保持较高且较稳定的检测率,尤其是检测率在90%以上时,检测率的提高将变得非常困难。对此专家学者引入了多传感器检测系统,结合数据融合方法,可以有效提高系统的检测稳定性、速度、检测范围及检测性能[12-15]。
分布式检测系统采用不同的CFAR检测器用于局部传感器检测并进行局部判决,并将判决结果发送回融合中心进行数据融合和全局判决[16-17]。Blum和Kassam[18]提出了一种分布式单元平均恒虚警率(distributed cell averaging constant false alarm rate, DCA-CFAR)检测器,采用CA-CFAR检测器作为局部检测器,将二元判决结果发送回融合中心,然后通过AND和OR融合准则进行全局判决。相比CA-CFAR检测算法,提高了在均匀噪声环境下的检测性能,但是针对非均匀噪声环境,检测性能仍然较差。对此Uner[19]和Blum[20]分别提出了非均匀噪声环境下的分布式检测算法,将OS-CFAR检测算法作为局部检测器虽然可以在一定程度上提高系统的检测性能,但是选择合适的参数较为困难,引入更多的局部检测器,将更有利于提高分布式检测系统的检测性能。
针对以上问题,本文提出了一种改进的分布式IVI-CFAR (improved variability index-constant false alarm rate, IVI-CFAR)检测算法,对VI-CFAR作为局部检测器并进行了改进,引入OS-CFAR检测器,根据局部统计量选择不同的局部检测器,提高局部背景噪声功率的估计精度,从而提高局部检测器的检测性能,克服了分布式VI-CFAR检测算法中局部检测器过于单一的不足,有效提高系统在均匀和非均匀噪声环境下的检测性能。
1 改进的VI-CFAR检测算法
改进的VI-CFAR检测算法的结构原理见图1。
图1中,雷达的回波同相I和正交Q信号经过包络检波器后,将得到的参考单元序列存入线性缓冲池中,并从中选择N+1个参考单元,把中间参考单元作为测试单元X0,左侧相邻的N/2个和右侧相邻的N/2个参考单元分别组成Leading子窗口A和Lagging子窗口B,每个参考单元呈独立同分布。IVI-CFAR检测器可以选择子参考窗A、子参考窗B或者整个参考窗用于背景噪声功率估计。同时,在CA-CFAR,GO-CFAR和SO-CFAR的基础上引入OS-CFAR局部检测器。IVI-CFAR检测器根据统计量VI与子窗口A和B的背景噪声功率均值比2个参量,选择不同的检测器进行背景噪声功率的估计记为Z。功率估计值再乘以门限检测系数记为T,就可以得到功率检测门限T·Z,每个参考单元均可以作为待检测单元xn+1与检测门限T·Z进行比较,判断目标有无。其中,H1表示有目标,H0表示无目标。
1.1 IVI-CFAR局部统计量定义
统计量VI是一个二阶统计量,是估计均值和方差的函数。可以表示为
(1)
(2)
为了判断每个子参考窗口中参考单元功率分布是否均匀,将得到的VI与比较门限KVI进行比较,如果VI≤KVI,则子参考窗口参考单元呈均匀分布;如果VI≥KVI,则呈非均匀分布。
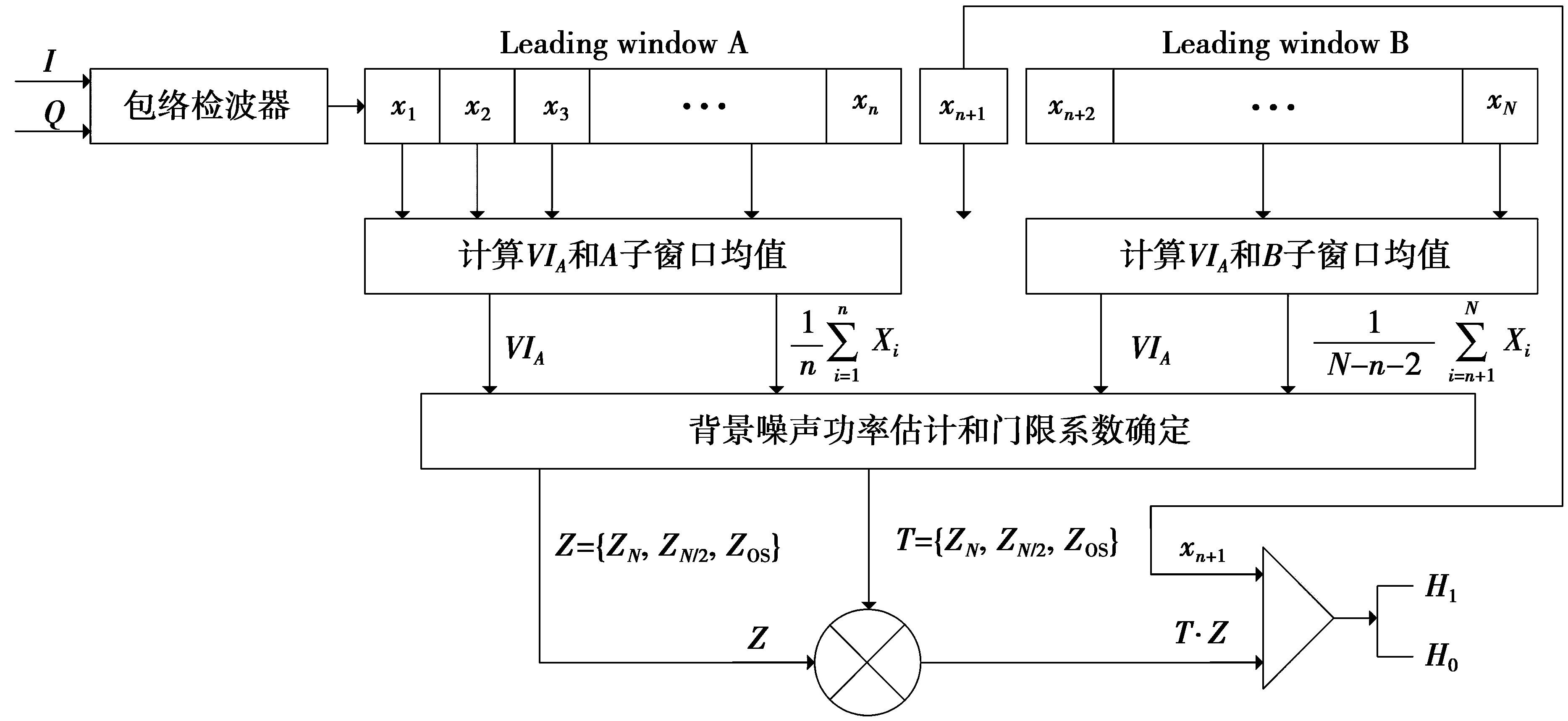
图1 IVI-CFAR检测器框图Fig.1 IVI-CFAR block diagram
MR表示子参考窗A和B的均值比,表示为
(3)
(4)
(5)
MR的分布函数可以表示为
(6)
为了判断每个参考窗口中参考单元功率均值是否相同,还需要将计算得到的MR与比较门限KMR进行比较,如果1/KMR≤MR≤KMR,则均值相同;如果MR≤1/KMR或者MR≥KMR,则均值不同。
KVI和KMR均为参数,后续通过仿真可以得到最优值。VIA,VIB和MR可以通过计算得到。
1.2 IVI-CFAR检测器选择
检测器的选择和检测门限的估计取决于子参考窗A和B中参考单元的分布情况及参考单元均值是否相同等因素。下面针对参考窗中参考单元所处的3种不同环境分别进行分析。
1.2.1 CA-CFAR检测器选择
如果子参考窗A和B中参考单元均呈均匀分布,且均值相同,满足如下2个条件,即
VIA≤KVI,VIB≤KVI
(7)
1/KMR≤MR≤KMR
(8)
(7)—(8)式中:VIA为子参考窗A的VI统计量;VIB为子参考窗B的VI统计量;KVI为VI的比较门限。
根据(7)—(8)式可以判断检测单元所处环境为均匀噪声环境,此时IVI-CFAR检测算法将选择CA-CFAR检测方法进行背景噪声功率估计,即取参考窗中所有参考单元均值作为背景噪声功率估计值。背景噪声功率估计值记为ZCA_N,其目标虚警率记为Pf_CA_N,检测率记为Pd_CA_N,功率门限系数记为TCA_N。ZCA_N,Pf_CA_N,TCA_N和Pd_CA分别表示为

(9)
Pf_CA_N=(1+TCA_N)-N
(10)
TCA_N=(Pf_CA)-1/N-1
(11)
(12)
(9)—(12)式中:S为信噪比(Signal-noise-ratio, SNR);N为参考窗长度。
但是在实际应用环境下,由于雨雾、路面积水等因素,噪声回波中含有边缘杂波干扰信号。当一个或多个干扰目标参考单元出现在参考窗中时,如果干扰目标参考单元只出现在参考窗A中,子参考窗A中的参考单元呈非均匀分布,子参考窗B中的参考单元呈均匀分布,满足以下条件,即
VIA≥KVI,VIB≤KVI
(13)
MR≤1/KMR或MR≥KMR
(14)
此时,待检测单元被认为是处在均匀噪声环境下,为了提高检测率,IVI-CFAR检测算法将选择参考窗B中参考单元功率均值作为背景噪声功率估计值记为ZCA_B,表示为
(15)
如果干扰目标参考单元只出现在子参考窗B中时,子参考窗B中的参考单元呈非均匀分布,子参考窗A中的参考单元呈均匀分布,满足条件,即
VIA≤KVI,VIB≥KVI
(16)
此时,待检测单元被认为是处在均匀噪声环境下,为了提高检测率,IVI-CFAR检测算法将选择子参考窗A中参考单元功率均值作为背景噪声功率估计值,记为ZCA_A,表示为
(17)
针对杂波边缘干扰信号或目标干扰信号只出现在子参考窗A或者B中时,IVI-CFAR检测算法选择CA-CFAR对参考单元呈均匀分布的子参考窗A或者B中的N/2个参考单元取均值作为背景噪声功率估计,其目标虚警率记为Pf_CA_N/2,检测率记为Pd_CA_N/2,功率门限系数记为TCA_N/2。则Pf_CA_N/2,TCA_N/2和Pd_CA_N/2分别表示为
Pf_CA_N/2=(1+TCA_N/2)-N/2
(18)
TCA_N/2=(Pf_CA_N/2)-2/N-1
(19)
(20)
1.2.2GO-CFAR检测器选择
如果子参考窗A和B中均包含杂波干扰单元,即满足条件,即
VIA≥KVI,VIB≥KVI
(21)
这种情况下,待检测单元被认为是处在非均匀噪声环境下,满足(14)式和(21)式的条件。如果此时待检测单元本身就是杂波干扰单元的情况,此时为了避免过多的虚警,IVI-CFAR检测算法将选择GO-CFAR检测方法进行背景噪声功率估计,选择子参考窗A和B中均值最大值作为背景噪声功率估计值。背景噪声功率估计值记为ZGO。目标虚警率记为Pf_GO,检测率记为Pd_GO,功率门限系数记为TGO。则Pf_GO和Pd_GO分别表示为
Pf_GO=2(1+TGO)-N/2-
(22)
(23)
TGO可以由设定的目标恒虚警率Pf_GO根据(23)式求得。ZGO可以表示为
(24)
1.2.3SO-CFAR检测器选择
在满足(14)式和(21)式的条件下,如果此时待检测单元本身并非杂波干扰单元,为了避免选择GO-CFAR可能导致较大的检测损失,IVI-CFAR检测算法将选择SO-CFAR检测方法进行背景噪声功率估计,选择子参考窗A和B中均值最小值作为背景噪声功率估计值。背景噪声功率估计值记为ZSO。目标虚警率记为Pf_SO,检测率记为Pd_SO,功率门限系数记为TSO。则Pf_SO和Pd_SO分别表示为
(25)
(26)
TSO可以由设定的目标恒虚警率Pf_SO根据(26)式求得。ZSO可以表示为
(27)
1.2.4OS-CFAR检测器选择
满足(14)式和(21)式的条件下,如果多个干扰目标出现在参考窗中,并同时出现在子参考窗A和B中时,子参考窗A和B中参考单元均呈现非均匀分布。
如果此时选择功率均值最大的子窗口的功率均值作为背景噪声功率估计值,将导致较大的检测损失,检测率严重下降。相反,选择最小的子窗口的功率均值作为背景噪声功率估计值,则会导致过多的虚警。针对这种情况,本文引入了OS-CFAR检测算法,在对参考窗中所有参考单元功率进行升序排列的基础上,通过第k个参考单元功率值作为背景噪声功率估计值。此时背景噪声功率估计值记为ZOS,目标虚警率记为Pf_OS,检测率记为Pd_OS,功率门限系数记为TOS。
ZOS,Pf_OS和Pd_OS分别表示为
ZOS=Xk
(28)
(29)
(30)
TOS可以由设定的目标恒虚警率Pf_OS根据(30)式求得。综上,不同情况下的检测器选择以及检测门限表示如表1。
假设Z表示背景噪声功率估计值,则Z={ZCA,ZCA_A,ZCA_B,ZGO,ZOS};T表示功率门限参数,则T={TCA_N,TCA_N/2,TGO,TOS}。Z和T的选择与当前子参考窗A和B以及选择的检测器有关(见表1)。待检测单元xn+1通过与检测门限T·Z进行比较,得到二元判决结果{0,1}。
xn+1≥Z·T⟹H1
(31)
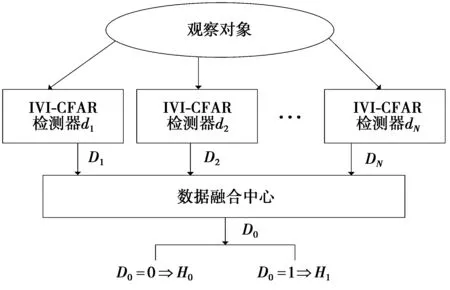
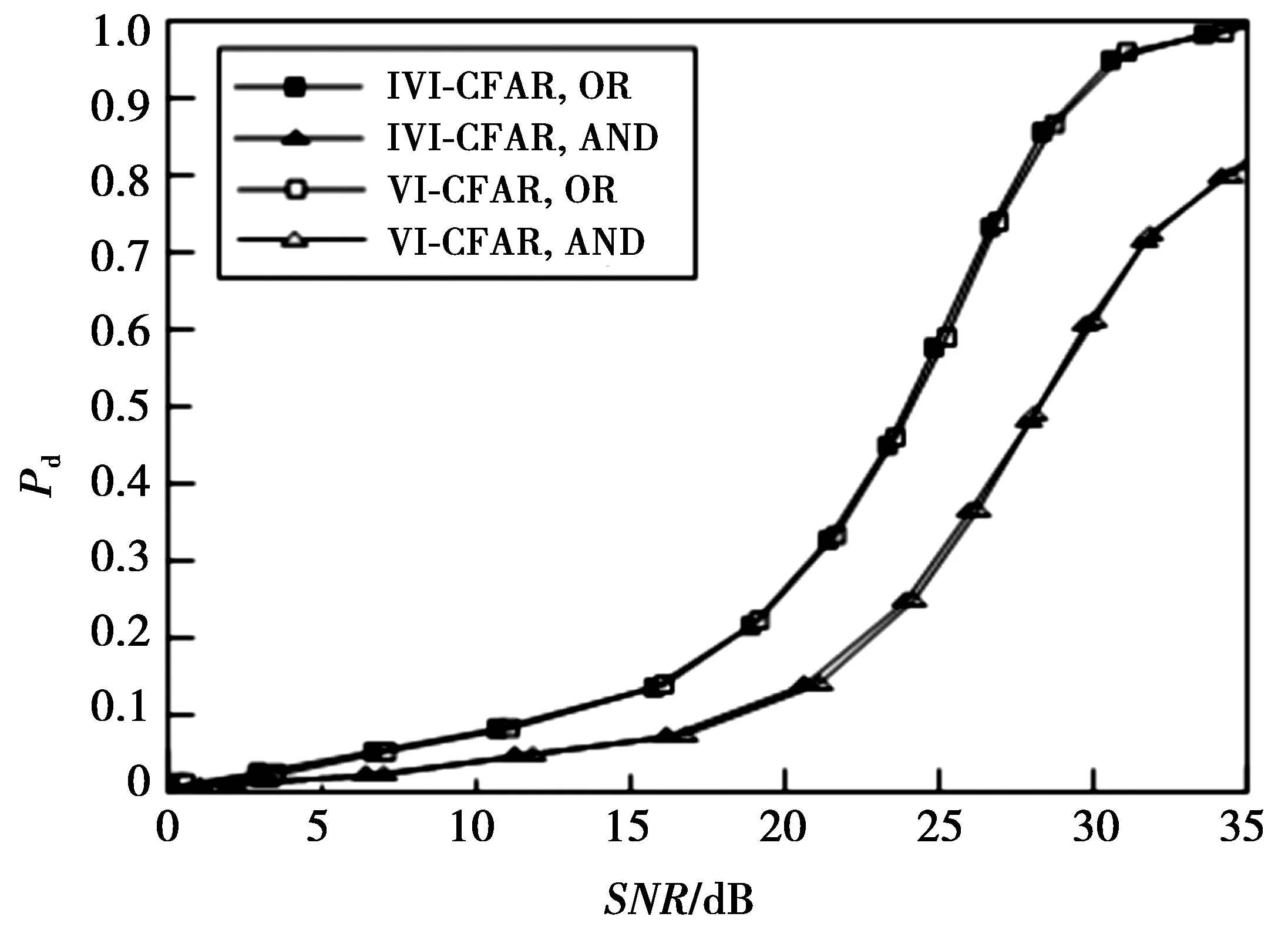
xn+1 (32) 表1 检测器选择和检测门限计算 基于IVI-CFAR检测器的分布式检测系统结构原理图如图2。 图2 并行分布式IVI-CFAR检测系统结构图Fig.2 Parallel distributed IVI-CFAR detection system block diagram 图2中,并行分布式IVI-CFAR检测系统由N个IVI-CFAR检测器组成,记为di,i=1,2,3,…,N, 每个检测器di均进行局部判决,得到局部判决结果Di,i=1,2,3,…,N,Di∈[0,1]。局部判决结果发送到融合中心,通过融合得到全局判决结果D0。每个检测器di的检测概率和虚警概率分别用Pdi和Pfi,分别表示为 Pdi={Pd_CA_N,Pd_CA_N/2,Pd_GO,Pd_SO,Pd_OS} (33) Pfi={Pf_CA_N,Pf_CA_N/2,Pf_GO,Pf_SO,Pf_OS} (34) 而融合中心分布式检测系统检测概率和虚警概率分别用Pd和Pf表示。假设所有的检测器di是相互独立的,且每个检测器的观测值也相互独立。本文在融合中心采用“AND”, “OR”融合规则对各检测器返回的二元判决结果进行处理,得到全局判决结果,记为D0。 融合中心采用AND融合规则时,如果每个检测器di返回的局部判决结果Di全部为1时,全局二元判决结果为1,否则全局二元判决结果为0。将所有Di值进行逻辑与运算即可得到融合结果D0为 D0=D1&&D2&&D3…&&DN (35) 当D0=0时,全局二元判决结果为无目标,当D0=1时,全局二元判决结果为有目标。目标判决方法表示为 D0=1⟹H1;D0=0⟹H0 (36) Pd和Pf分别表示为 (37) (38) 融合中心采用OR融合规则时,如果每个检测器di返回的局部判决结果Di全为0,则全局二元判决结果才为0,否则全局二元判决结果为1。将所有Di值进行逻辑或运算即可得到融合结果D0为 D0=D1‖D2‖D3……‖DN (39) 当D0=1时,全局二元判决结果为有目标;当D0=0时,全局二元判决结果为无目标。目标判决方法同(34)式。Pd和Pf分别表示为 (40) (41) 本文在Matlab环境下,通过蒙特卡洛仿真方法,通过Swerling I起伏目标模拟非均匀噪声环境。对所提出的分布式IVI-CFAR检测系统的检测性能进行仿真。以2个和3个检测传感器为例给出了采用不同融合规则时,各信噪比(signal-to-noise ratio, SNR)条件下的检测性能对比。假设各局部传感器的参数相同,即:N1=N2=N3=36,SNR1=SNR2=SNR3,Pf1=Pf2=Pf3;融合中心目标虚警率Pf=10-4;KMR和KVI分别等于1.82和4.75。 图3为IVI-CFAR在由2个检测器组成的分布式系统中,且每个检测器的参考窗中只包含一个杂波边缘干扰环境下的检测率对比分析曲线。从图3中可以看出,当每个检测器的参考窗中只包含一个杂波边缘干扰单元时,VI-CFAR和IVI-CFAR均选择不包含杂波边缘干扰单元的子参考窗并用CA-CFAR检测器进行功率估计。所以,分布式VI-CFAR和IVI-CFAR融合中心具有接近相同的检测性能,且基于“OR”融合规则的分布式检测系统检测性能优于基于“AND”融合规则的检测性能。在均匀噪声环境下也具有同样的检测性能。 但是在实际应用场景中,可能2个子参考窗中均包含有杂波干扰信号单元或者目标干扰单元,此时,分布式VI-CFAR和IVI-CFAR检测性能严重下降。针对多目标干扰的环境,本文在VI-CFAR的基础上,引入了OS-CFAR局部检测器,提出了IVI-CFAR分布式检测系统。 图4为针对“AND”和“OR”2种融合规则,分布式IVI-CFAR和OS-CFAR检测器在多目标干扰环境下的检测率对比分析曲线。 图3 单个杂波环境下分布式IVI-CFAR和VI-CFAR检测率对比Fig.3 Pd comparison of distributed IVI-CFAR and VI-CFAR in a clutter edge situation 图4 多目标干扰环境下分布式IVI-CFAR和OS-CFAR检测率对比Fig.4 Pd comparison of distributed IVI-CFAR and OS-CFAR in multi-interfering targets situation 从图4中可以看出,在多个干扰目标参考单元环境下,分布式IVI-CFAR和OS-CFAR检测器具有几乎相同的检测性能。同样基于 “OR”融合规则的分布式检测系统检测性能优于基于“AND”融合规则的。 图5为针对“AND”和“OR”2种融合规则,分布式IVI-CFAR和OS-CFAR检测器在多杂波干扰环境下的检测率对比分析曲线。 从图5中可以看出,在多杂波干扰环境下,分布式IVI-CFAR检测算法优于OS-CFAR检测器,针对杂波边缘干扰参考单元在分布集中的情况下,通过选择SO-CFAR检测器,提高了检测率,降低了检测损失;针对待检测参考单元本身可能是杂波干扰信号的情况下或者杂波干扰参考单元数量较多的情况下,通过选择GO-CFAR检测器,降低了虚警率。同样基于 “OR”融合规则的分布式检测系统检测性能优于基于“AND”融合规则的。 图5 多杂波干扰环境下,分布式IVI-CFAR和OS-CFAR检测率对比Fig.5 Pd comparison of distributed IVI-CFAR and OS-CFAR in multi-clutter edges situation 图6为针对2个检测传感器且采用“AND”和“OR”2种融合规则的分布式IVI-CFAR和VI-CFAR检测算法在多目标干扰和多杂波干扰的复杂环境下的检测率对比曲线。 图6 多目标和多杂波干扰环境下分布式IVI-CFAR和VI-CFAR检测率对比Fig.6 Pd comparison of distributed IVI-CFAR and VI-CFAR in multi-interfering targets and multi-clutter edges situation 从图6中可以看出,在复杂的多目标干扰和杂波干扰环境下,即每个检测器的参考窗中既包括多个杂波干扰单元,同时也包括多个目标干扰单元时,在2种融合规则下,分布式IVI-CFAR检测算法均优于VI-CFAR检测算法,尤其是参考窗中同时出现多个杂波干扰单元和多个干扰目标单元的情况下。同样采用“OR”融合规则时的分布式检测系统检测性能优于基于“AND”融合规则的。因此,本文提出的分布式IVI-CFAR检测算法不仅在均匀噪声环境下,而且在多目标干扰和多杂波边缘干扰的非均匀噪声环境下均具有较优和较稳定的检测性能。尤其是采用“OR”融合规则时,分布式检测系统检测性能达到最优,检测损失最小。 各算法时间和空间复杂度对比见表2。 表2 各检测算法时间和空间复杂度对比 由表2可知,本文提出的IVI-CFAR检测算法,在时间和空间复杂度方面没有明显优势,但是算法的检测性能大幅提升。鉴于目前嵌入式系统的硬件资源相当丰富,冗余量即可满足硬件资源需求,时间和空间复杂度方面的劣势,在实用性方面可以接受。 本文在分布式VI-CFAR检测算法的基础上,结合OS-CFAR检测器的优点,提出分布式IVI-CFAR检测及其融合算法,引入OS-CFAR检测器,根据参考窗中参考单元的统计分布情况即2个统计量与相应的比较门限的比较,选择合适的检测器用于估计背景噪声功率,同时将IVI-CFAR作为局部检测器,提出了分布式IVI-CFAR检测算法,通过“AND”和“OR”2种融合规则对局部检测器发回的二元判决结果进行融合得到全局判决结果,提高了分布式VI-CFAR检测算法在边缘杂波干扰和多目标干扰环境下的检测性能。本文对提出的分布式IVI-CFAR检测算法在Matlab环境下,通过蒙特卡洛方法进行了仿真,在非均匀噪声环境下均具有较好和较稳定的检测性能,在采用“OR”融合规则时,全局检测性能最优。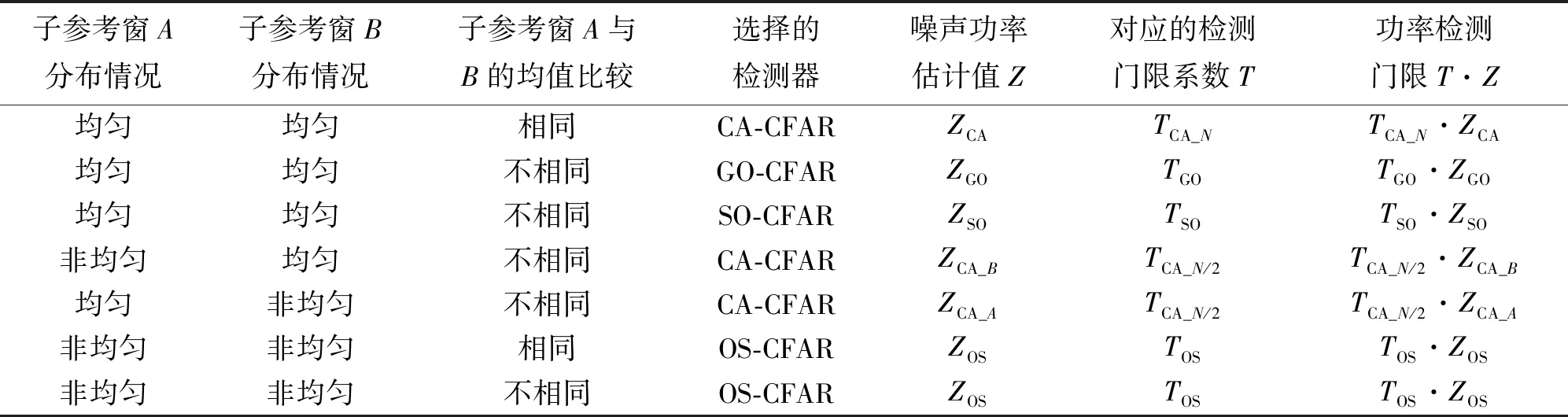
2 分布式IVI-CFAR检测算法
2.1 AND融合规则

2.2 OR融合规则
3 仿真分析




4 结 论
猜你喜欢
噪声与振动控制(2022年3期)2022-07-04
汽车实用技术(2022年4期)2022-03-07
科学与信息化(2021年30期)2021-12-24
雷达与对抗(2020年2期)2020-12-25
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数字通信世界(2020年2期)2020-03-04
火力与指挥控制(2019年4期)2019-06-14
地震研究(2017年3期)2017-11-06
应用海洋学学报(2015年1期)2015-11-22
遥测遥控(2015年2期)2015-04-23