
基于离散数据的双螺杆压缩机共轭转子型线计算
2019-09-05 10:04卢家伦田雅芬邢子文
压缩机技术 2019年3期
卢家伦,田雅芬,邢子文
(西安交通大学,陕西西安710049)
1 引言
双螺杆压缩机由于具有结构简单、工作可靠、效率高、操作简单等一系列的优点,被广泛应用于空气动力、制冷以及石油化工等工业领域,在压缩机市场中占据着十分重要的地位。螺杆压缩机中,最关键的是放置于机壳内的一对相互啮合的转子。转子型线是螺杆压缩机设计中的核心技术,因为转子型线的好坏基本决定了螺杆压缩机泄漏特性以及动力特性的优劣。转子型线设计是开发高性能双螺杆压缩机的关键技术之一,螺杆压缩机性能的不断提高以及市场份额的不断扩大,是与转子型线的发展密不可分的。国际上著名的螺杆压缩机生产厂家,都是伴随着新型线的开发成功而不断发展壮大的。目前螺杆压缩机型线设计主要使用解析法,但使用解析法比较复杂。按传统的解析法,用一次或二次曲线来构成型线有其局限性,它不可能采用无限多段曲线向转子型线的最优法逼近。而应用数值法计算,可按人们的愿望任意修正型线,使型线设计灵活多样,有利于加速型线的更新换代。
邢子文[1]总结了螺杆压缩机转子型线设计和计算方法;N.Stosic[2]将齿轮与齿条的啮合原理应用于螺杆压缩机的端面型线研究中;Dmytro Zaytsev[3]则利用啮合线与端面型线间的关系,依据啮合线来生成端面型线;刘扬娟[4]通过三次样条曲线拟合的方法计算型线一阶导数,实现共轭型线的数值计算;段辉超[5]、穆安乐[6]则是通过三次参数样条拟合的方法求出一阶导数再求解型线的共轭型线;马仙龙[7]、罗泽刚[8]等采用了NURBUS(非均匀有理B样条)曲面的形式表示转子型线的方法。
根据参数样条拟合计算一阶导数的方法,对于目前由多段二次曲线连接而成的转子型线的计算存在“奇异点”的问题。本文描述了使用参数样条拟合求解一阶导数并进一步求解共轭型线的方法和步骤,提出了对奇异点的解决办法,最后通过计算型线和理论型线的法向间隙误差的方法衡量计算方法的优劣。
2 计算共轭型线
为了用数学方程描述螺杆转子型线中各段组成齿曲线,建立如图1所示的4个坐标系:
(1) 固结在阳转子的动坐标系O1x1y1;
(2) 固结在阴转子的动坐标系O2x2y2;
(3) 阳转子的静坐标系O1X1Y1;
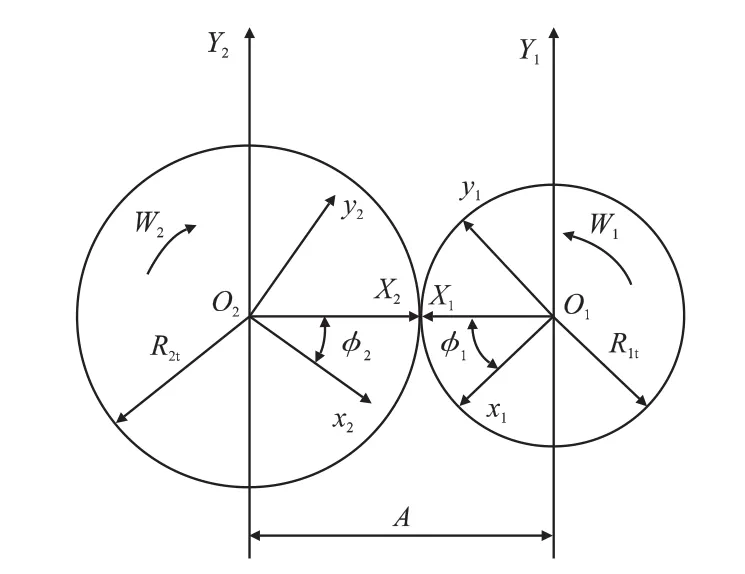
图1 坐标系关系图
(4) 阴转子的静坐标系O2X2Y2。
由于螺杆压缩机的阴、阳转子之间是定传动比啮合,故有

式中 φ2、φ1——阴、阳转子转角
n2、n1——阴、阳转子转速
ω2、ω1——阴、阳转子转速
R2t、R1t——阴、阳转子节圆半径
z2、z1——阴、阳转子齿数
i——传动比
A——阴、阳转子中心距
螺杆压缩机转子型线上的每一点,都可表示在上述4个坐标系中,各个坐标系之间可以相互变换,这里只需要用到固结在阴、阳转子上的动坐标系之间的变换。固结在阴、阳转子上的动坐标系的变换关系如下
(1) 动坐标系O1x1y1与动坐标系O2x2y2的变换

对于组成齿曲线为参数方程的转子型线,其包络条件通式为

由于阴转子的端面型线是以离散点的形式给出,各点的坐标为(x2j,y2j)(j=1,2,3……n),对于上述的包络条件式(3)并不适用,为此对包络条件通式推导可得
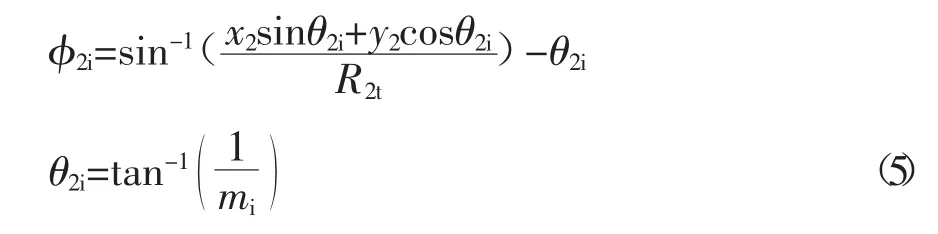
式中mi——一阶导数值
联立(2)、(5) 两式即可求得与阴转子端面型线共轭的阳转子端面型线,其中离散点的一阶导数值通过三次样条函数或者三次参数样条函数拟合求解获得。
3 计算一阶导数
在解决工程实际问题中,工程技术人员常常会将一些指定的样点连结成一条光滑的曲线,这样的曲线称之为样条曲线,对其进行数学模拟导出的函数叫做样条函数。对于一般的曲线,用三次样条函数可以很好的求出各离散点的一阶导数,但是它存在一定的局限性[9]:
(1) 大挠度问题。在大挠度的情况下,三次样条拟合精度不高,光顺性变差,甚至不能使用,而螺杆压缩机的转子型线十分复杂,往往存在大挠度问题。
(2) 缺乏几何不变性。也就是说,在给定了型值点的位置和边界切向后,用三次样条函数表示的插值曲线,依赖于坐标系的选择,样条曲线随着坐标系的改变而改变。这既是它的优点又是它的缺点:优点在于可以适当的旋转坐标系,把大挠度适当的转化为小挠度,避免出现光顺性变差甚至变坏的问题;缺点在于有可能找不到这样的一个坐标系化大挠度为小挠度,并且需要多次试验来找到这样的一个坐标系,比较麻烦。而采用三次参数样条曲线则可以避免这样的问题。
三次参数样条曲线:
现在设定在直角坐标平面上给定n个型值点Pi(xi,yi),i=1,2,…,n。那么相邻两型值点的弦长为设定参数曲线P→(t)=(x(t),y(t)),那么第i段曲线的方程为


由于相邻两段曲线在型值点Pi处一阶和二阶导向量连续,经过推导以及化简后得到以下方程
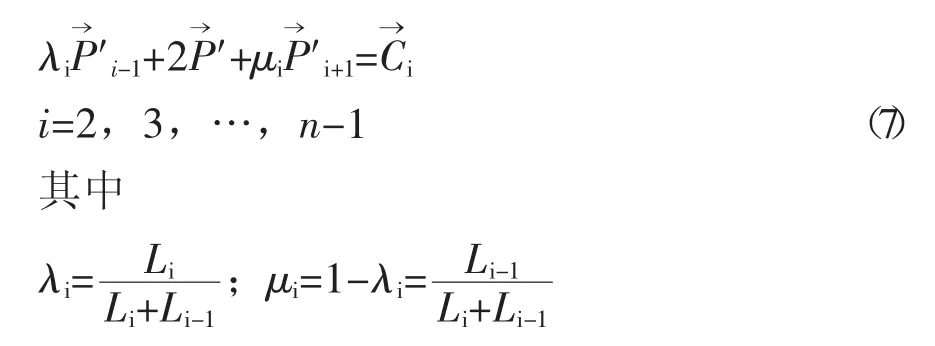
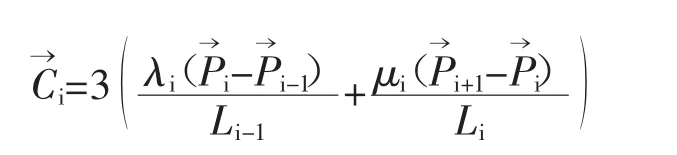
以上共有n-2个线性方程,为求解n个需要的导数值,还需要补充2个边界条件。边界条件即是整个曲线在2个端点处应适应的条件,通常应根据实际问题的需要来确定。对于螺杆压缩机转子型线,采用夹持端边界条件即可,这时要求

将n-2个连续方程(7) 以及2个边界条件(8)写成矩阵形式,则有
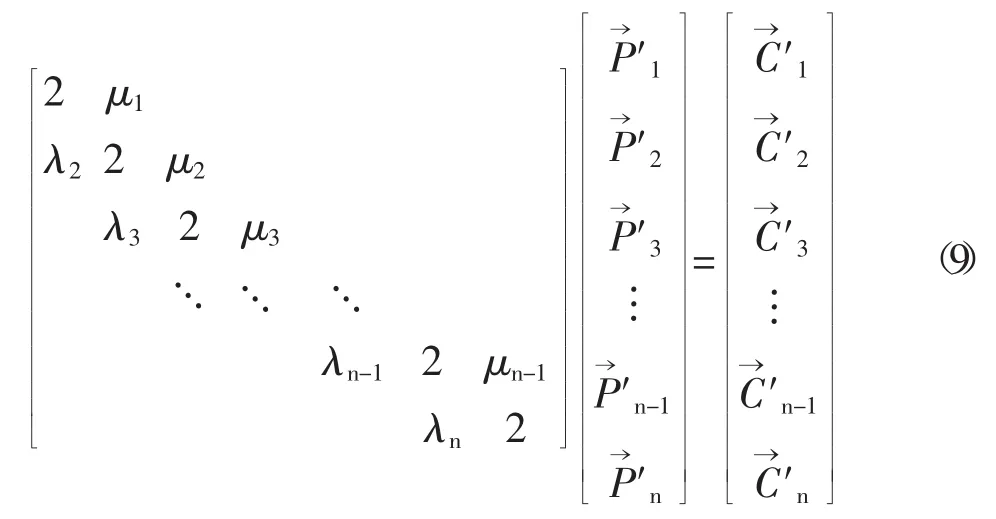
由此,解以上矩阵,即可求得各型值点处的一阶导数。
4 实例计算
对于以离散点形式给出的型线数据,采用参数样条拟合,能够精确地通过每个型值点,可以很好地进行拟合。但是转子型线一般由多段二次曲线连结在一起,在二次曲线连接处可能出现两段曲线在该处的二阶导数不相等的情况,不符合参数样条函数拟合条件,从而导致一阶导数以及共轭型线的计算存在一定的误差。
表1列出部分型线数据,并用参数样条函数求出阴转子各型值点的一阶导数mi值,对应的转子型线见图2。
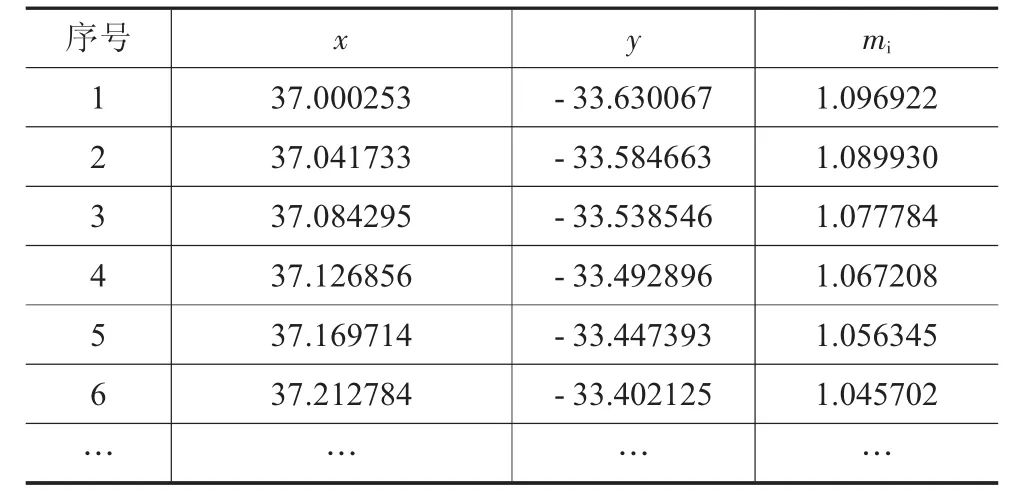
表1 曲线1相关型线数据
程序运行计算得到的共轭型线结果如图3,运行结果与解析法计算得到的对应理论型线型值点的距离误差图如图4所示。
可以发现,计算得到的共轭型线与给出的理论型线基本重合,但在一处地方出现了2个奇异点。
对于出现的这2个奇异点,目前查找到的文献中没有提到这样的一个情况。在认为型线本身以及共轭型线计算方法没有问题的情况下,认为一阶导数的计算存在误差,而造成这样的误差的原因如下:三次参数样条曲线拟合的前提条件是相邻两段曲线在型值点处的一阶导数和二阶导数连续,而出现奇异点处对应的阴转子型线处是两段型线的连接处,理论型线中,该连接处的要求是函数连续以及一阶导数连续,并没有要求二阶导数连续,那么在该连接处不符合三次参数样条曲线拟合的前提条件。因此在该连接处附近用三次样条函数拟合计算一阶导数存在误差。

图2 阴转子型线

图3 对应的共轭阳转子型线
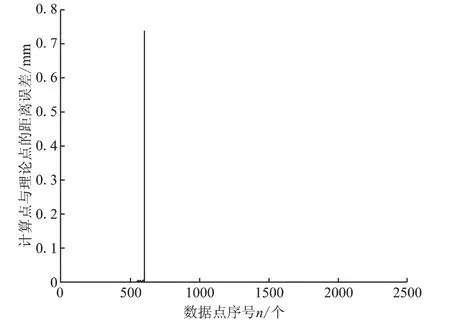
图4 共轭型线距离误差分布
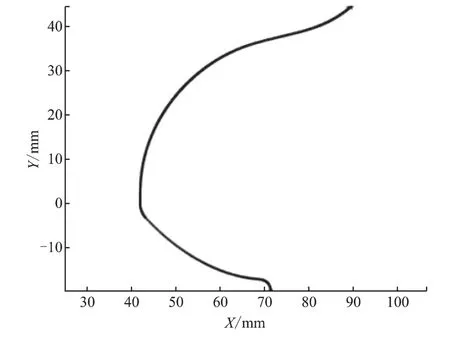
图5 修正后曲线1对应的共轭阳转子型线
为了解决这个问题,采用以下方法重新计算一阶导数:对出现奇异点处的这两个点的一阶导数进行修正,以误差较大的奇异点对应点为端点,把阴转子型线拆分为两段型线重新计算一阶导数,并把重新计算的奇异点对应的一阶导数替换之前的一阶导数。重现计算后的共轭型线曲线图如图5,距离误差分布图如图6所示。
可以看到,对阴转子曲线连接处的一阶导数进行修正之后,奇异点消失,计算得到的共轭阳转子型线与理论共轭阳转子型线几乎完全重合在一起,计算点与理论点的最大距离误差大大减少,其中曲线1的最大距离误差由0.74 mm降低至0.034 mm。此时,虽然计算点与理论点距离上存在着偏差,但计算点依然是在型线上的,而不是完全偏离型线,所以通过计算对应的计算点和理论点的距离的方法来衡量误差的方法并不准确。最为准确的方法应当是计算理论型线和计算型线之间的法向间隙来衡量计算偏差。由于阴转子型线型值点较多,两型值点之间的距离较小,因此在计算型线法向间隙时可以假设两型值点之间的型线为直线。那么每一型值点处的法向间隙误差就是计算点和与其最近理论点的距离的法向分量,其中法向方向是指计算点在计算型线的法线方向,根据该计算点的一阶导数(切向方向) 求得。计算得到的型线数据与理论型线近似法向间隙值如图7所示。
可以看到,对于给出的阴转子型线,其共轭型线的计算型线与理论型线最大的法向间隙误差为0.00022 mm。
为了衡量法向间隙误差总体误差的大小和偏差,可以采用均值与方差或者标准差进行描述,其具体的计算式如下
均值
对于给出的阴转子型线,其共轭型线法向间隙误差分布的均值为:b¯=4.59e-7mm,标准差为s=4.81e-6mm。
综上可得相关结果的误差很小,小到目前测量方法都识别不出来的程度,完全满足实际工业生产的需要,因此认为程序计算的结果是十分正确可靠的。

图6 修正后共轭型线的距离误差分布
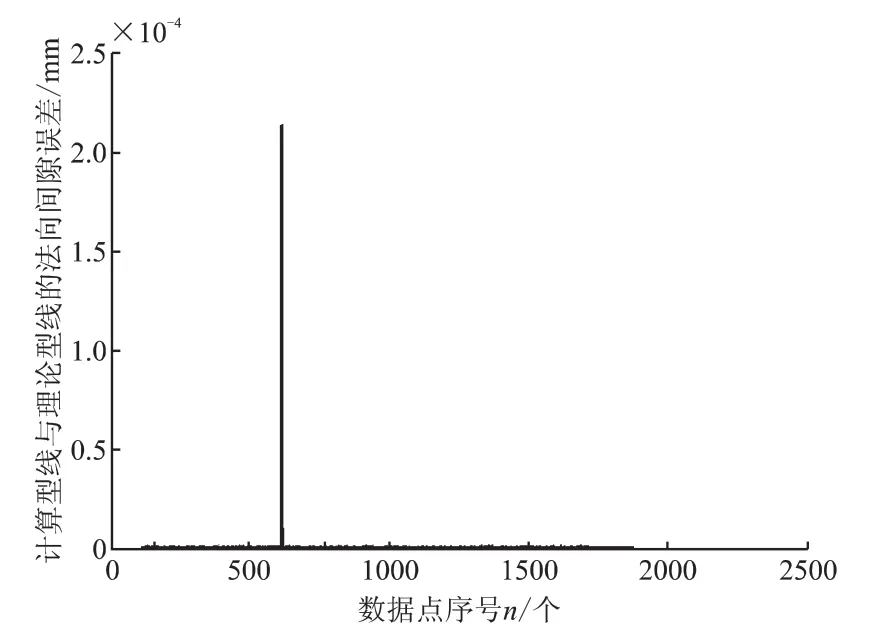
图7 计算型线与理论型线的法向间隙误差
5 结论
本文通过相关实例给出了根据任意螺杆压缩机阴转子型线计算,其共轭阳转子型线的一般原理和具体操作方法,并通过把计算结果与理论型线数据做对比,分析和评估了这种型线计算方法的误差,说明了该方案的精度和可行性,对相关的工业生产具有很强的指导性。此外,作者发现在利用三次参数样条函数计算一阶导数具有几何不变性的优点,但是对于阴转子型线连接处的一阶导数计算存在一定的误差,需要对一阶导数进行一定的修正。此外,对于计算型线与理论型线的误差时,应当采用法向间隙误差衡量,而不是简单地采用计算型线与理论型线距离误差来衡量,希望对今后相关设计人员的计算能起到一定的启发作用。
猜你喜欢
数学物理学报(2022年1期)2022-03-16
数学物理学报(2021年6期)2021-12-21
机械工程师(2020年12期)2020-12-23
图学学报(2020年5期)2020-11-13
机械制造(2020年8期)2020-09-30
河北理科教学研究(2020年1期)2020-07-24
应用数学(2020年2期)2020-06-24
制造技术与机床(2017年7期)2018-01-19
软件(2017年6期)2017-09-23
计算机测量与控制(2017年6期)2017-07-01
