
统一电能质量调节器的新型控制策略研究
2019-09-24 08:50张焕东王硕禾张国驹2解天宇马天琪
石家庄铁道大学学报(自然科学版) 2019年3期
张焕东, 王硕禾, 张国驹2, 解天宇, 马天琪
(1.石家庄铁道大学 电气与电子工程学院,河北 石家庄 050043;2.金风科技股份有限公司,北京 100176)
0 引言
随着社会的迅猛发展,电力电子器件和设备的发展也日新月异,同时,大量的非线性以及冲击负荷接入电网,造成电网电压和电流波形的畸变,以及电压的跌落、闪变和三相电压不平衡等[1]。为了解决电能质量问题,统一电能质量调节器(UPQC)应运而生。传统的PI控制器,其控制器的增益是根据系统参数和跟踪误差设计的[2]。当系统参数估计不准确时,控制器的设计无法抗拒电力系统扰动,表现出较低的稳定性和鲁棒性[3]。此外,当UPQC遇到电力系统网络运行环境的多个挑战时,如负载瞬变、供电侧暂态等,传统PI控制器的鲁棒性较低,其跟踪性能会在电力系统扰动中下降[4]。Iurie et al[5]提出了一种改进的自适应控制策略,但其控制的求取需要对系统参数进行辨识。王静[6]提出了基于电压空间矢量的控制策略,但由于串并联侧不同的约束关系,需采取2种不同的控制策略。Zhu et al[7]提出了一种基于线性二次型调节器的控制策略,仅限于暂态过程中限制电压偏差。
基于上述观点,提出了一种基于CGT的直接自适应控制策略。首先,3个具有不同阶跃时间、相位差为120°的阶跃信号形成指令输入信号。考虑到参考模型是一种理想的振荡器,设计了CGT模块,它是一个适用于已知系数的线性时不变系统参考模型的控制器,用于并联和串联变流器参考信号的产生。当具有不同阶跃时间的3个阶跃输入信号乘以电源电流和负载电压的峰值并送入参考模型时,参考模型将输出期望的正弦参考信号。最后,通过被控对象的输出和参考模型的输出产生的跟踪误差,选出合适的自适应增益,从而设计出UPQC的控制策略。因此,保持被检测信号和参考信号之间的跟踪误差接近为零,从而达到渐近跟踪效果,使UPQC在不同的电力系统运行状态下保持良好的性能[8]。
1 UPQC的拓扑结构及数学模型
1.1 UPQC的拓扑结构
图1为UPQC的拓扑结构,它是由2个电压源变流器(VSI)背靠背连接,通过直流母线整合而成。并联变流器与负载并联,能够抵消电网电压谐波和抑制电网电压波动;串联变流器与电源电压串联,能够消除负载产生的谐波电流以及无功电流[9]。三相无控二极管桥式整流器采用电阻RL和电感LL负载作为非线性负载产生电流谐波。并联电感器(Lsh)用于变流器的并联耦合到系统网络,并联电容Csh是用来消除端电压的开关频率。LC滤波器用作无源低通滤波器以消除串联变流器输出电压中的高频开关纹波。串联变压器与电力线串联使用,以建立串联变流器和系统网络之间的联系。
1.2 UPQC的数学模型
图2为在电力系统的配电网中UPQC的单相等效电路。图中,Vs表示电源电压,Rsa和Lsa表示线路参数。与串联变流器相连的LC滤波器由Lsea和Csea组成,阻抗Rsea和Rsha分别表示串联变流器和并联变流器的开关损耗。

图1 三相三线制UPQC的拓扑结构
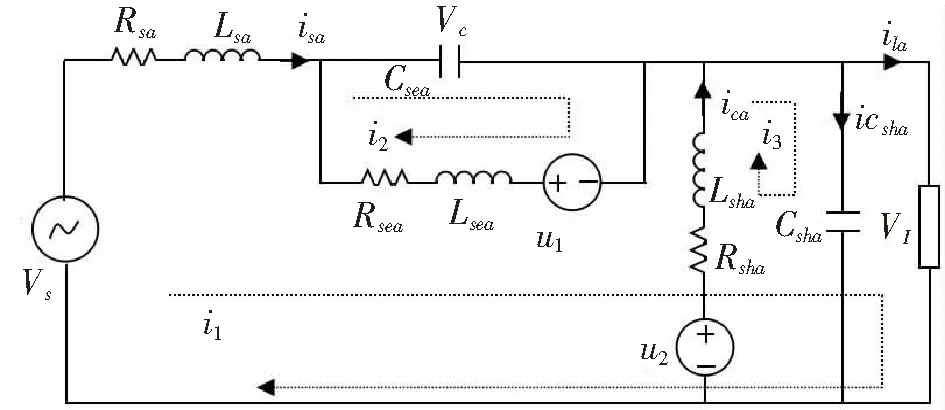
图2 UPQC的单相等效电路
同样,Lsha和Csha分别表示并联变流器的耦合电感和滤波电容。Vt和isa分别表示负载电压和电源电流。Csh两端的电压表示为Vl,Cse两端的电压表示为Vc,ica表示并联变流器的注入电流。u1和u2分别表示串联变流器和并联变流器的输出电压。
分析上述系统的状态空间模型,其中,4个状态变量为3个回路电流和两个电容电压,可以表示为:x=[i1,i2,i3,Vc,Vl]T。电源电压Vs为外部输入,负载电压Vl和电源电流isa为UPQC的输出,状态变量u1和u2为UPQC的控制输入,用u表示:u=[u1,u2]T。
通过考虑状态变量“xp”、控制输入量“u”和系统外部输入“Vs”,可以得到完整的状态空间方程
(1)
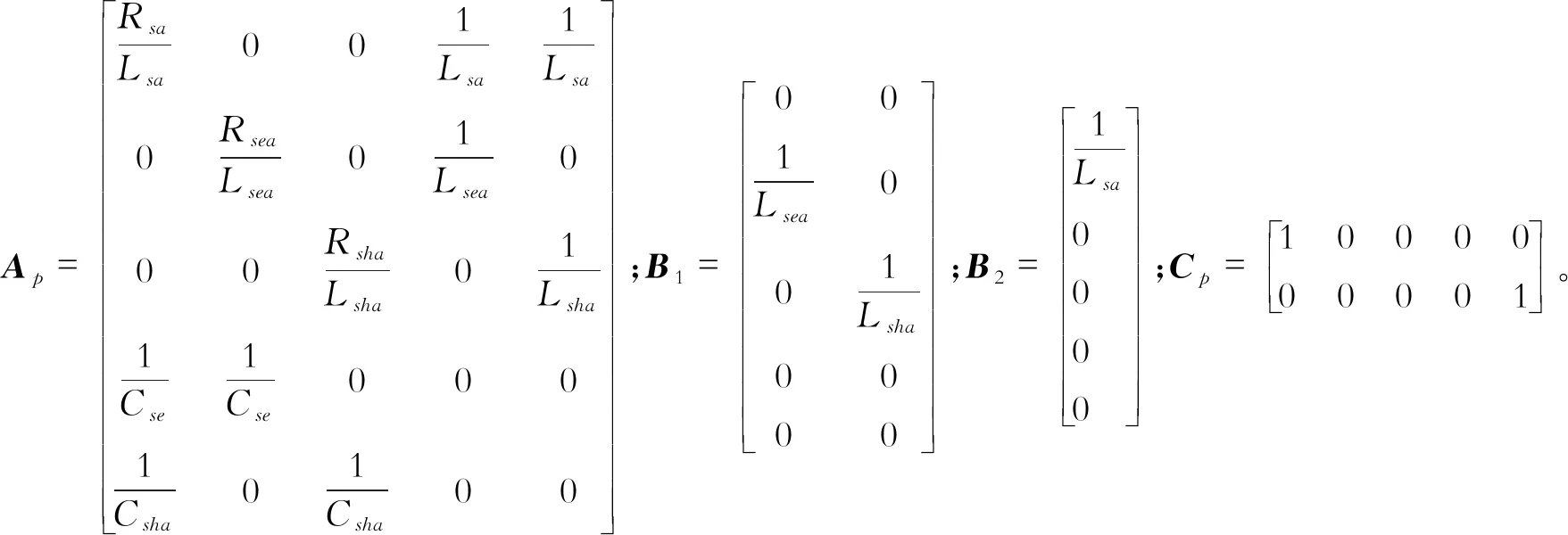
为得到状态矩阵Ap、B1和B2及Cp,对于图2所示的等效电路图,由基尔霍夫定理,可得
(2)
将式(1)~式(2)联立,可获得UPQC如下矩阵系数
2 基于CGT的直接自适应控制器的设计
基于CGT的直接自适应控制器是一种模型参考自适应控制。控制器是基于CGT理论的,CGT理论中参考模型可以随意选取,对象并不是跟踪参考模型的每个状态量,而是只跟踪参考模型的输出,所以不要求参考模型的阶次与系统阶次相同[10]。CGT是一个适用于已知系数的线性时不变系统参考模型的控制策略,并用于并联和串联变流器参考信号的产生[11]。直接自适应控制器是用来控制实际输出信号yp和参考信号yr之间的跟踪误差。此外,这种跟踪误差通过调整控制增益,从而作为自适应控制方程的一部分。这种控制方式能逐步减少UPQC的输出和CGT输出之间的误差。因此,这种自适应控制方式能在负载侧和电源侧有扰动的情况下提供更好的跟踪效果。
2.1 CGT控制器的设计
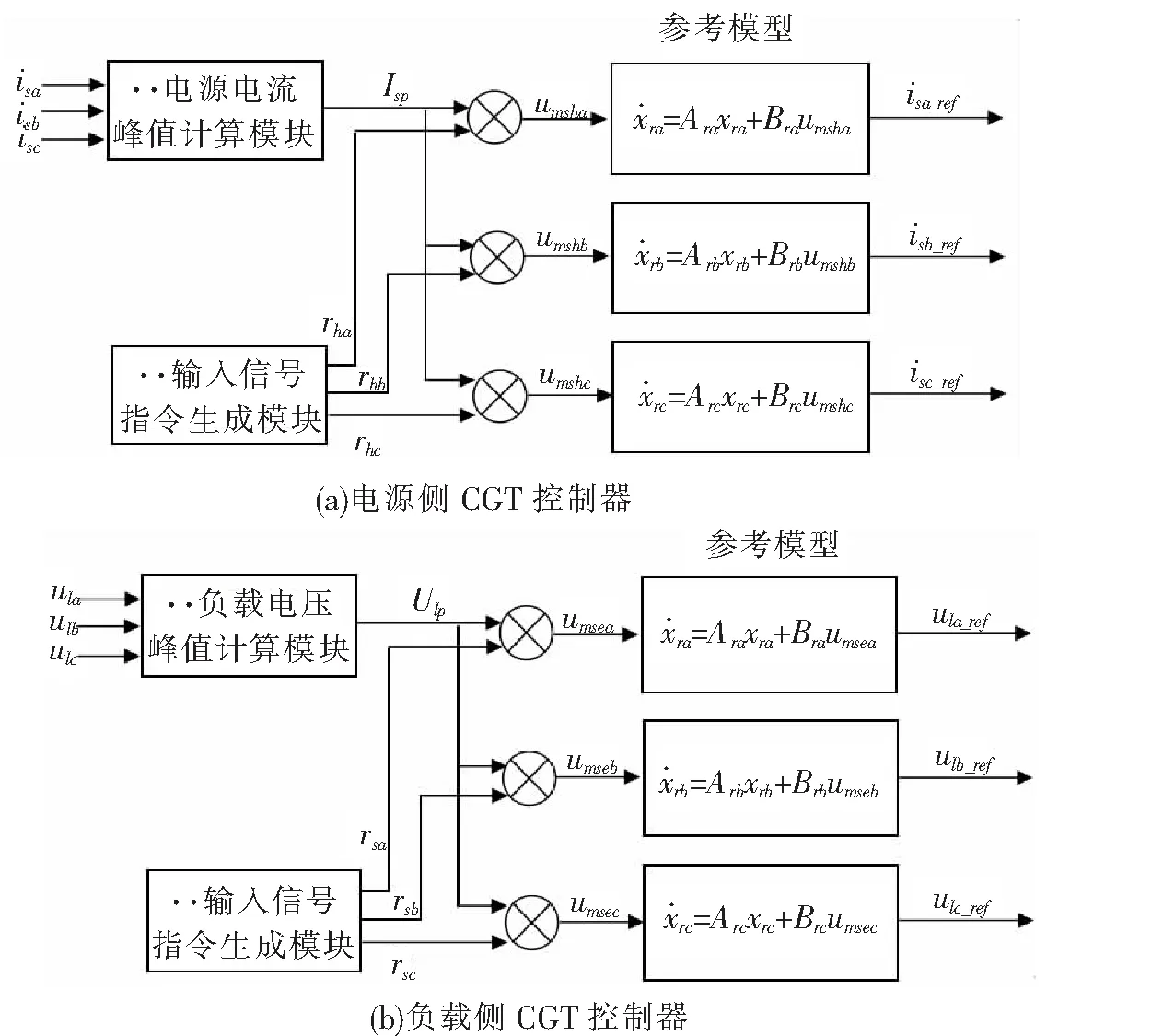
图3 CGT控制器的控制原理
CGT控制器的设计是以获得UPQC的输出响应为基础的。电源电流isa和负载电压Vl为实际的输出信号,这两个信号将保持为电力系统网络基准幅值和频率的标准正弦波。因此,CGT控制器的工作原理如下:当参考阶跃信号输入模型时,CGT模块就如同理想的振荡器一样产生频率为50 Hz的正弦波,其振幅为电源电流和负载电压的峰值。
UPQC的串联变流器和并联变流器可以定义为一个线性时不变参考模型,其状态空间方程如下
(3)
图3为基于CGT的参考信号产生模型。该模型由峰值幅度计算模块、指令生成输入模块和参考模型组成。
计算电源电流的峰值(Isp)和负载电压的峰值(Vlp)的公式如下
(4)
接下来,3个阶跃输入信号作为指令参考输入信号(rabc)被送入到模型中,在参考模型输出时将产生120°相移参考信号。并联变流器和串联变流器参考模型的指令输入信号表达式如下
umsh(abc)=Isp×rh(abc),umse(abc)=Vlp×rs(abc)
(5)
参考模型是选择的性能良好的模型,在控制系统中提供被控系统的跟踪信号[12]。当这些指令输入信号被送入参考模型时,将会输出并联变流器和串联变流器的正弦参考信号。
2.2 直接自适应控制器的设计
区别于一般自适应控制法,直接自适应控制算法控制的求取不需要对系统参数进行辨识,其控制方法能够自动找到正确的增益,并有效减少模型输出yr(sh-se)和被控对象的输出yp之间的跟踪误差[13]。因此,其跟踪误差定义如下
er(sh-se)=yr(sh-se)-yp
(6)
直接自适应控制的原理图如图4所示。

图4 直接自适应控制原理图
利用直接自适应控制器能够计算出自适应控制律,使并联和串联变流器的跟踪误差er(sh-se)接近于零。为了实现这一目标控制,在CGT控制法的基础上,确定了自适应控制法[14],其定义如下
Up(sh-se)=kx(sh-se)xr+ku(sh-se)um(sh-se)+ke(sh-se)[yr(sh-se)-yp]
(7)
式中,up(sh-se)是其控制方法;um(sh-se)是其阶跃输入信号;kx(sh-se)、ku(sh-se)和ke(sh-se)是并联变流器和串联变流器的自适应控制增益。
综合上述计算结果,可以把自适应控制法变换成如下表达式:up(sh-se)=kr(sh-se)s(t),其自适应增益可以写成m×nr的矩阵kr(sh-se),状态变量可以写成nr×1的矢量形式s(t),其特征如下
(8)
上述定义的增益kr(sh-se),其值等于比例增益kp(sh-se)和积分增益kI(sh-se)的总和,其定义如下
kr(sh-se)=kp(sh-se)+kI(sh-se)
(9)
比例增益kp(sh-se)和积分增益kI(sh-se)可由如下公式获得
kp(sh-se)=v(t)sT(t)T1,kI(sh-se)=v(t)sT(t)T2
(10)
式中,v(t)=Cper(sh-se)=(yr(sh-se)+yp);T1、T2为nr×nr的时不变的对称加权阵[15]。
3 UPQC的仿真与实验
根据前述拓扑结构搭建仿真系统。仿真模型的电路参数如下:电源相电压为220 V,初相角为零;电源侧部分R=10 Ω,L=1 mH;串联变压器变比为1∶1,Lse=1 mH,Cse=1 μF;并联部分Lsh=1.5 mH,Csh=6 μF;直流侧电容Cdc=3 000 μF,其基准电压为700 V。
3.1 电网电压畸变量三相对称时的仿真分析
分别采用传统的PI控制器以及本文分析的基于指令跟踪的直接自适应控制策略来对UPQC进行控制。仿真时,电源电压于0.08~0.14 s之间上升0.2 pu,在0.14~0.2 s之间,被加入0.1 pu的3次谐波和0.12 pu的5次谐波,0.2~0.26 s之间下降0.3 pu。在这种情况下,UPQC同时对电压、电流进行补偿。分别采用传统PI控制方法和本文分析的控制策略对UPQC串、并联侧的电压、电流补偿情况进行仿真。
3.1.1 UPQC串联侧仿真结果比较
(1)传统PI控制器。补偿前的电源电压波形仿真结果如图5(a)所示,可以看出未补偿前电压波形已经畸变,补偿后电压波形基本为正弦,如图5(b)所示。经过THD分析,补偿前电源电压畸变率高达14.41%,采用传统PI控制器补偿后,电源电压己趋近为正弦波,畸变率降为8.28%。
(2)基于CGT的直接自适应控制策略。补偿后的电源电压波形仿真结果如图5(c)所示,可以看出补偿后电压波形基本为正弦波。经过THD分析,采用基于指令跟踪的直接自适应控制策略补偿后的电源电压畸变率为6.54%,补偿效果较传统PI控制器有所提高。
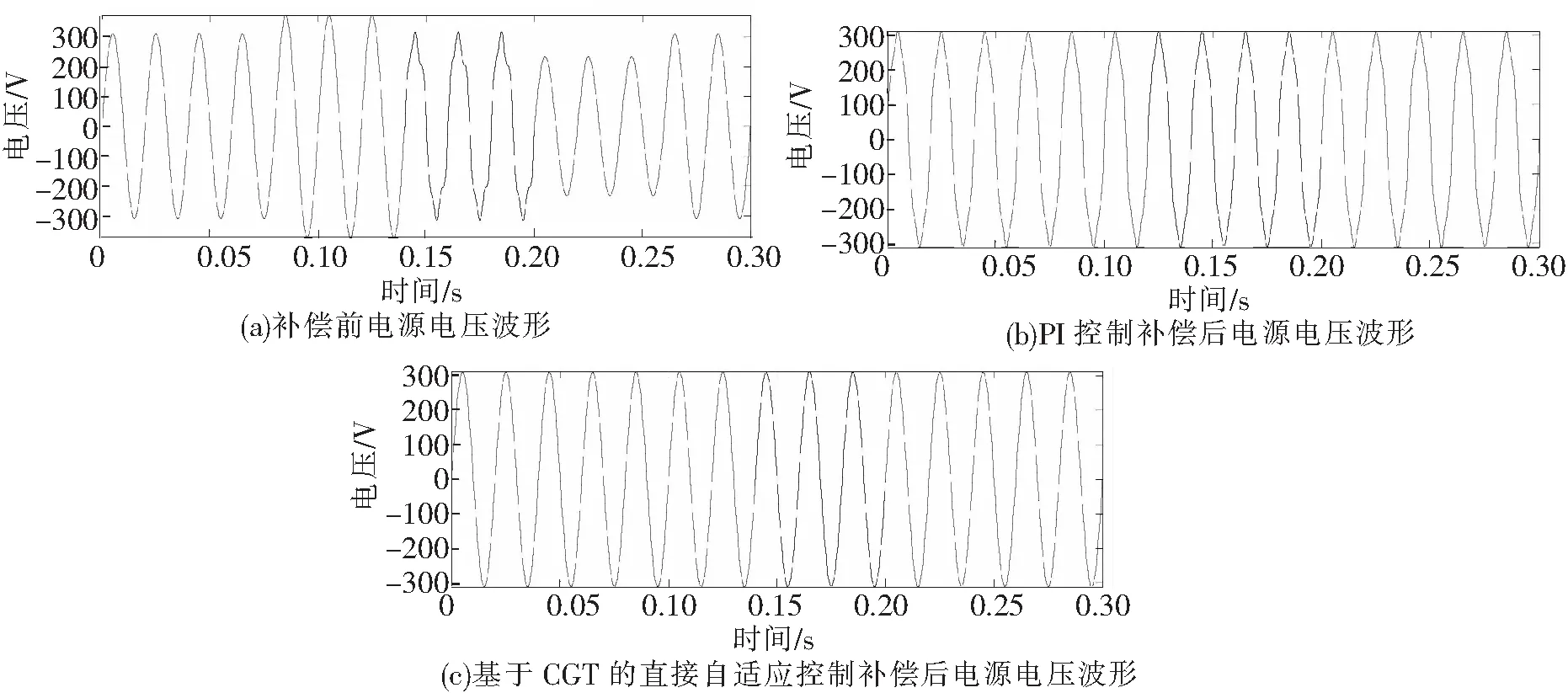
图5 补偿前后电源电压波形对比
3.1.2 UPQC并联侧仿真结果比较
(1)传统PI控制器。图6(a)为应用传统PI控制器补偿后的电网电流波形图。由THD分析,可知图中未补偿前电网电流畸变率高达30.65%,采用传统PI控制器补偿后的电网电流已趋近正弦波形,由THD分析,畸变率为10.75%,但有明显的毛刺。
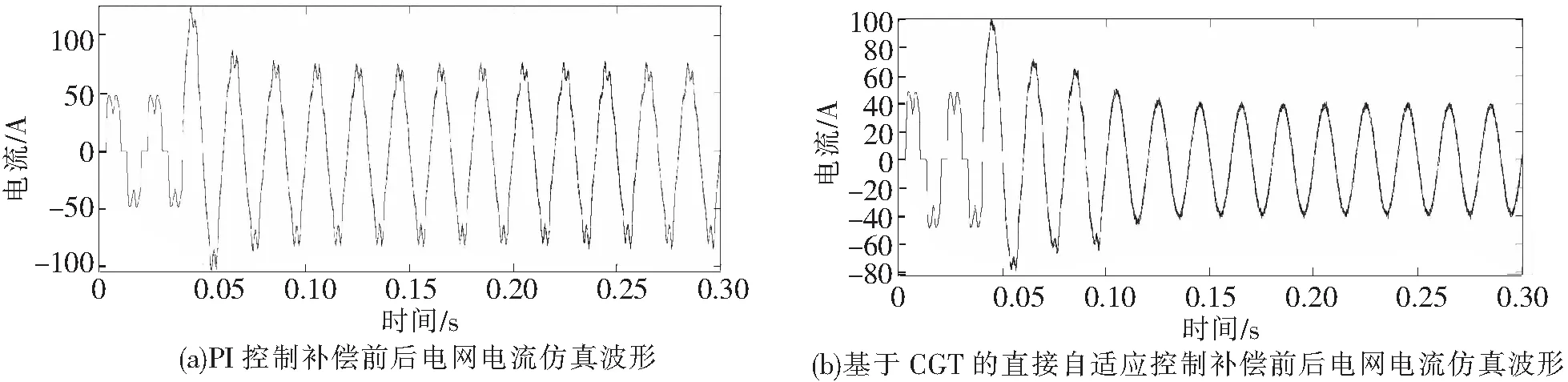
图6 补偿前后电网电流波形对比
(2)基于CGT的直接自适应控制策略。采用基于CGT的直接自适应控制策略,对电网电流进行补偿。图6(b)为应用基于CGT的直接自适应控制策略补偿后的电网电流波形图。由THD分析,采用此控制方法补偿后的电网电流畸变率已降低为4.27%,毛刺问题已经解决,较前者补偿效果较好。
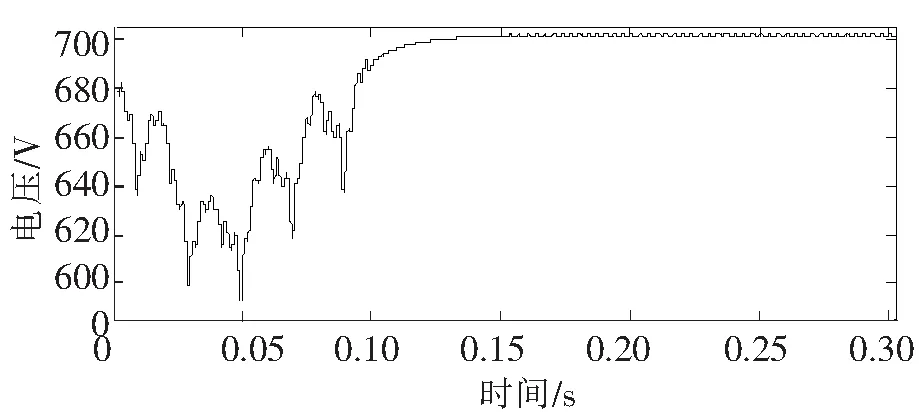
图7 直流侧电压仿真波形
3.1.3 直流侧电压仿真
直流侧电压采用PI调节法进行控制。仿真时,PI的调节参数设定为Kp=3.1,KI=1.2。图7为直流侧电压的仿真,可以看出,在5个周波后,直流侧电压可以较平稳的稳定在基准值700 V左右。
3.2 实验设计
完成仿真实验后,以STM320F28035DSP为核心控制芯片,设计了UPQC的硬件实验电路,进行了补偿电压暂降(暂升)及谐波电流的实验验证。实验中,三相电网电源为三相交流电,其相电压有效值为220 V,基波频率为50 Hz,直流侧电压为700 V。
其控制板采用TI公司的STM320F28035DSP芯片,装有一个CRA模块。三相逆变桥的开关器件,采用的是碳化硅,它的开关频率高,耐压高,其开关频率可以高达50 kHz。直流输入后经过了一个四串两并的电容电流,输出之后经过了一个霍尔传感器,其偏移电压是2.5 V,变比是1 A∶100 MV。在霍尔传感器之后,接入了3个1.35 mH的电感。在电网电压和电感之间,每相都接入了2个继电器,可以通过控制继电器的动作实现电网电压的投切。直流端的稳压是通过28035DSP芯片控制boost电路实现的。
调节电网电压,负载接非线性负载,同时使电压和电流补偿单元共同运作,实验波形如图8所示。
由图8可知,补偿后,电压参数已接近额定值,电网电流的波形也近似为正弦波,其THD也已下降,能够同时实现电压补偿与电流补偿,解决了电压质量问题和电流质量问题。

图8 补偿前后电压电流波形
4 结论
针对传统PI控制器鲁棒性差,且补偿后电网电压、电流THD含量高等问题,提出了一种基于CGT的直接自适应控制策略。最后通过模拟电网电压畸变量三相对称进行仿真与实验,得出如下结论。
(1)相比传统PI控制器,基于CGT的直接自适应控制策略不需要滤波器,其控制器结构简单,被控对象的阶数与参考模型的阶数可以不同,并且通过调节自适应系数,可以使跟踪误差减小,适用于多输入多输出系统。
(2)实验结果显示采用基于CGT的直接自适应控制策略,能够有效解决如电压的暂升与暂降、电流谐波等电能质量问题。相比传统PI控制器,UPQC 的电源电流和负载电压获得的平衡性更好,畸变更小,同时,负载电压更接近于额定值,因而更为精确。所以,采用基于CGT的直接自适应控制策略,UPQC 的补偿性能得到了提高,因此控制更加有效。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
三门峡职业技术学院学报(2021年4期)2021-04-19
自动化学报(2019年6期)2019-07-23
电子制作(2019年10期)2019-06-17
通信电源技术(2018年5期)2018-08-23
铁道学报(2018年5期)2018-06-21
中国教育信息化·基础教育(2016年12期)2017-04-15
自动化学报(2017年11期)2017-04-04
军事运筹与系统工程(2016年3期)2016-09-26
科教导刊·电子版(2016年21期)2016-08-23
