
基于超宽带和惯性传感器融合的人体动作捕捉系统
2019-10-28 01:07史卫亚张洪超
传感器世界 2019年8期
史卫亚 张洪超
河南工业大学 信息科学与工程学院,河南郑州 450001
一、引言
动作捕捉是一种对人体动作进行数字化记录和动作重现的技术[1]。人体动作捕捉技术经常被应用到电影、动漫、游戏的制作中[2],还可以应用到医疗诊断、姿态矫正、医疗康复辅助[3]、动作分析和动作识别等方面。
动作捕捉技术可分为光学式、机械式、电磁式、声学式以及惯性传感式[4]。目前,主流的技术主要采用光学式和惯性传感式这两种方式。光学系统捕捉人体动作精度高、实施性好,但是使用复杂并且价格昂贵。惯性传感器动作捕捉系统只需要在身体指定的关节佩戴传感器就可以完成动作数据的采集。虽然惯性传感器能够非常精确地测量每个关节的旋转,但是并不能实现人体精确的位移。
根据以上分析,提出了一种结合惯性传感器和超宽带定位系统的人体动作捕捉的方法。该方法在非视距条件下辅助超宽带进行定位,使用惯性传感器的加速度计估计位置信息。实验表明该方法可以有效地提高系统的定位精度。
二、惯性动作捕捉系统
惯性传感器动作捕捉系统是一个自给系统,没有外界参考点不能直接提供位置数据,所以目前的惯性动作捕捉系统多数只估计人体的姿态,不能获取人体在全局坐标下的位置信息,为了解决这个问题,研究者们提出了多种方案。例如,Jimenez等[5]提出了一个基于卡尔曼滤波的惯性导航系统与无线电射频识别系统紧耦合的方法,用于室内步行者的定位导航;Brodie等[6]使用融合惯性传感器、GPS、压力传感器、摄像机和经纬仪的动作捕捉系统捕捉人体在高山滑雪比赛时的三维动力学和运动学信息;Fischer等[7]设计了一个用于步行者定位微型传感器系统,该系统里需要在实验对象的脚上放置融合了惯性传感器和超声波传感器的设备。
随着室内定位技术的发展,超宽带定位技术日趋成熟,可以使用超宽带定位系统和惯性传感器相结合的方法实现人体动作捕捉。两种传感器具有良好的互补性:超宽带技术可用于室内精确定位,精度高于其他的定位方式[8-9]。但在定位过程中易受室内非视距、多路径效应的影响,从而导致长期定位精度低的问题[10];通过惯性传感器辅助定位来弥补超宽带定位的不足,从而获得高精度的定位效果。
该技术首先通过传感器捕获表演者的三维加速度、角速度和磁场数据;再把获取的信息通过无线传输协议以帧的形式发送到计算机端,然后采用卡尔曼滤波对获取的运动信息进行去噪和融合,得到四元数数据;最后把四元数数据输入到虚拟3D人体模型中,从而驱动虚拟3D人体模型的动作,实现人体动作捕捉。
三、传感器定位方法
1、超宽带定位系统
超宽带定位系统由一个标签和三个基站组成。超宽带定位的原理是由基站发送一个信号到标签所需要的时间来推算标签的位置[11]。这里使用双面双向测距方法,双面双向测距的方法是在单面双向测距的基础上再增加一次通讯,两次通讯的时间可以弥补因为时钟偏移引入的误差[12],准确地获取基站和标签的距离就能得到标签的位置[13]。
2、惯性传感器定位算法
为了能够将惯性传感器与超宽带定位系统测量值融合,必须把加速度测量值转换为相对位移估计值。但是由于加速度计中存在噪声,而且在加速度用积分计算位移时放大了噪声,所以这里引入卡尔曼滤波器来减少加速度转换位移的噪声[14]。利用卡尔曼滤波器对状态信息进行校正,降低误差累计的影响,以实现辅助测量位移[15]。
四、传感器融合方法
为了融合超宽带定位提供的位置估计和惯性传感器提供的相对位置估计,根据视距和非视距使用不同的融合方法。
1、简单融合方法
使用积分方法计算x维度下,在时间步n的人体的位置XSIM,n,如公式(1)所示:
其中,xSIM,n,ySIM,n,zSIM,n—在时间步n的人体位置三维坐标;
XUWB,n—超宽带定位系统在x维度下,时间步n的人体位置坐标;
XIMU,n—惯性传感器在x维度下,时间步n的人体位置坐标;
δx,UWB,n—x轴中超宽带定位提供位置估计的标准偏差;
δIMU,n—惯性传感器的标准偏差。由于很难预测惯性传感器的标准偏差,所以三个维度都设置相同的值。使用以下过程处理积分误差带来的影响:
在时间步n,如果当前估计的超宽带定位标准偏差小于n-1的惯性传感器标准偏差,即用公式(2)表示:

其中,δk,UWB,n—超宽带定位系统在时间步n的位置偏差;
δIMU,n-1—惯性传感器在时间步n-1的标准偏差。那么惯性传感器的标准偏差将被重置为δIMU=0.05m/s2。否则,惯性传感器的标准偏差设置为:

其中,tsr—惯性传感器标准偏差被重置的时间间隔。
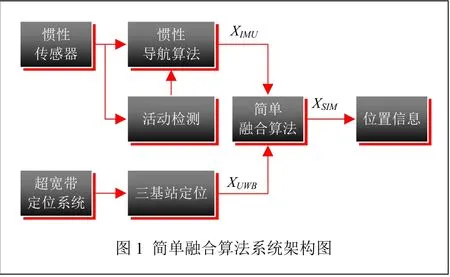
因此,根据超宽带定位误差标准偏差,惯性传感器误差标准偏差的无限增加受到限制,并且在可视距条件下复位积分误差。在非可视距条件下假定非视距引起的误差小于积分误差时,复位积分误差[16]。该融合算法的系统架构图如图1所示,算法工作流程如下:
(1)读取惯性传感器的加速度数据;
(2)读取超宽带定位系统中表演者的位置数据;
(3)根据基站定位系统判断表演者是否有位移;
(4)根据惯性传感器中的加速度数据判断表演者是否有位移;
(5)如果基站定位系统和惯性传感器同时有位移,那么更新表演者的位置信息。
2、非视距情况下的位置估计
将非视距检测与简单的融合算法相结合,如图2所示。该方法在没有检测到非视距条件下使用简单融合算法,并且由于超宽带定位和惯性传感器的位移估计融合算法减少超宽带定位的误差。如果检测到非视距情况,位置估计仅依赖于剩余的基站[17]。在剩余2个基站的情况下,如果计算x-y平面的2D位置,可以使用超宽带定位的上一个位置信息或惯性传感器的位置信息来预测现在的位置。如果惯性传感器计算的位置信息和上一个位置信息之间的距离不是很大,而且在二基站定位的范围内,则使用惯性传感器的位置估计;如果惯性传感器计算的位置信息和上一个位置信息之间的距离很大,而且和二基站定位的差别很大,那么直接使用上一个位置信息。具体流程如图2所示,虚线是非视距情况下的位置估算方法,算法工作流程如下:
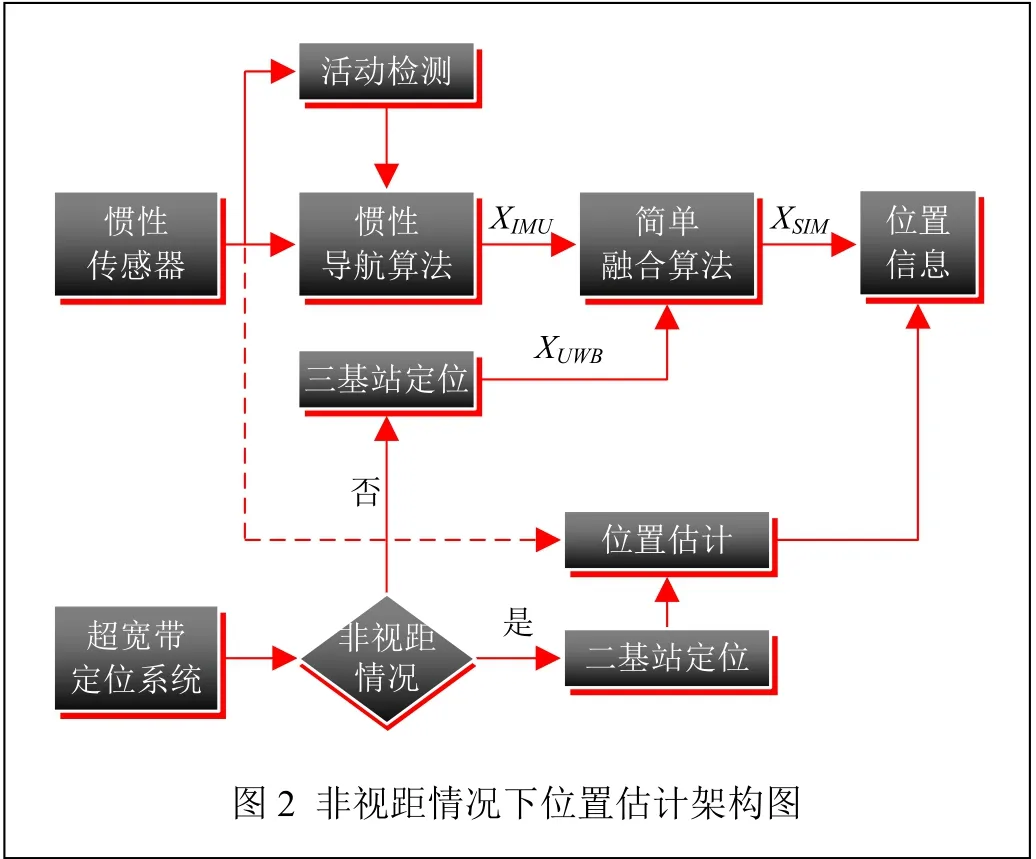
(1)读取惯性传感器中加速度数据;
(2)读取超宽带定位系统中表演者的位置数据;
(3)判断超宽带定位系统是否处于非视距情况;
(4)非视距情况下使用二基站定位和惯性传感器的位置估计。
以上是两种惯性传感器和超宽带定位系统数据融合的方法,非视距情况下的位置估计是在简单融合方法的基础上增加了对非视距情况下位置的估计。所以,第二种方法非视距情况下位置估算有更高的可用性,因为在实际情况中,人体在运动时经常会遮挡基站造成非视距情况,该实验采用了非视距情况下位置估计算法。
五、实验结果
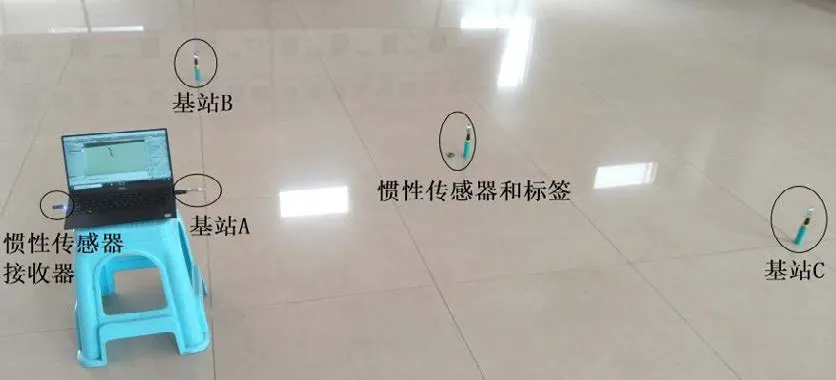
为了测试所使用的融合算法在动作捕捉系统中的有效性,在室内布置了场地,如图3所示。惯性传感器在人体身上的绑定,标签在人体身上的腰部。惯性传感器接收模块和基站A与电脑连接,基站B和基站C分别在基站A的上方和右方。动作数据最终通过Unity3D开发的3D虚拟人物模型来展示,如图4所示。
为了量化测试人体在静止时,非视距情况下使用融合算法和不使用融合算法对定位精度的影响。
首先把标签和惯性传感器腰部的节点放入待测试场地的中心坐标点(135cm,135cm),然后测试人员绕着测试场地中心的传感器匀速走一圈,以实现对超宽带定位系统的非视距干扰。每走一圈结束后记录下这组位置数据。一共测试了10次,得到了10组使用融合算法的位置数据和10组不使用融合算法的位置数据。为了方便对比实验数据,再测试一组没有干扰情况下的数据(即视距)与上述前两次实验数据对比。
分别计算上述10组使用融合算法的位置数据各组的平均值和标准差,再将计算所得的10组平均值和标准差求均值;将剩下的10组不使用融合算法的位置数据和一组没有干扰情况下的数据(即视距)用同样的方法处理。X轴和Y轴的计算结果分别如表1、表2所示,数据的平均值说明了定位的整体情况。
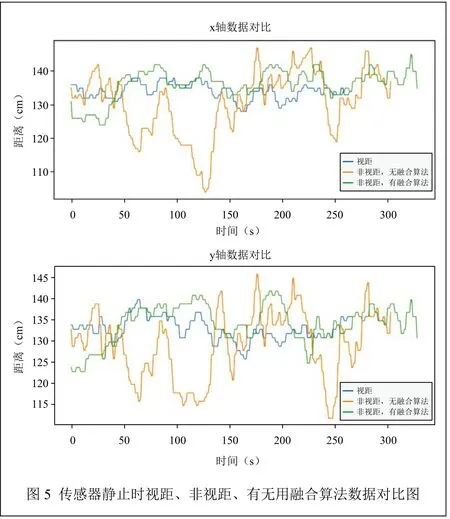
图5为X轴数据与Y轴数据分别在视距、非视距(无融合算法)、非视距(有融合算法)三种条件下的数据对比图。从图中可以看出,在视距条件下,X轴和Y轴的定位数据有波动,但是波动范围不大,基本趋于稳定;在非视距条件下,没有使用融合算法的定位数据波动较大,X轴数据波动范围在[100, 150]之间,Y轴数据波动在[110, 150]之间;而在非视距条件下,有融合算法的定位数据波动趋势和视距的波动基本重合,X轴波动范围在[125, 135]之间,Y轴波动在[125, 140]之间。
从上述实验结果可以得出结论,在传感器静止时,非视距条件下使用超宽带定位系统和惯性传感器相融合的定位方法,比单独使用超宽带定位系统,定位精度有了显著的提高。

表1 X轴数据对比表(单位:cm)

表2 Y轴数据对比表(单位:cm)
为了清晰地展示运动轨迹,人体携带传感器在2.4m×2.4m的正方形区域内逆时针走动1圈,运动轨迹如图6所示。其中,图6(a)是在单独的超宽带定位系统时得到的定位运动轨迹,从图中可以看出在整个定位过程中,超宽带定位存在许多偏离实际路线的值,定位误差较大;图6(b)是在使用超宽带定位系统和惯性传感器融合定位方法时得到的定位运动轨迹,从图中可以看出,在整个定位过程中,运动轨迹非常接近正常的运动轨迹。因此,该实验结果说明传感器在动态条件下,使用超宽带定位系统和惯性传感器融合的定位方法,比单独使用超宽带定位系统有效地提高了定位的精度。

六、结论
本文实现了一种基于超宽带和惯性传感器融合的人体动作捕捉系统,用于在动作捕捉中测量人体的位移。该系统由惯性传感器和超宽带定位系统这两部分组成。惯性传感器能够精确地测量人体肢体的动作,然而只靠惯性传感器不能测量全局的位置,因此,为了获得精确的位置数据,采用超宽带定位系统。但是,只依靠超宽带定位系统不能解决非视距情况,所以使用惯性传感器中的加速度计辅助超宽带定位系统定位。实验表明,采用超宽带和惯性传感器融合的方法可以有效地提高系统的定位精度,为动作捕捉解决位移问题提供了参考。超宽带和惯性传感器融合的捕捉系统还有待于进一步的研究,以实现更高精度的定位和动作捕捉。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中国计算机报(2020年9期)2020-03-25
宇航计测技术(2018年3期)2018-09-08
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年7期)2017-11-24
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
汽车与安全(2017年9期)2017-09-29
居业(2017年5期)2017-07-24
雷达学报(2017年1期)2017-05-17
