载人小行星探测飞行模式研究
2019-11-09 06:20李志杰王平黄震张小琳
航天器工程 2019年5期
李志杰 王平 黄震 张小琳
(1 中国空间技术研究院载人航天总体部,北京 100094) (2 北京空间飞行器总体设计部,北京 100094)
小行星是太阳系中具有特殊意义的天体,载人小行星探测有助于人类深入探索宇宙,并开展地球免受小行星撞击威胁的相关研究,还可以为更远的深空探测提供技术验证[1-3]。人类对小行星的探测至今已有约20年的历史,迄今为止发射了多个以小行星为主要探测对象的无人深空探测器:2012年12月13日,中国嫦娥二号卫星完成了对“图塔蒂斯”小行星的飞越探测;2015年3月6日,美国黎明号探测器完成了对“谷神星”小行星的环绕探测,实现了人类对小行星带区域的首次探测[4-5]。在美国政府2010年公布的“太空探索蓝图”中,提出在2025年实现载人小行星探测,2035年将人类送入环火星轨道,最终实现载人登陆火星[6]。相比无人探测,载人小行星探测能够发挥人的主观判断力,具备更好的创造性和灵活性,同时能够为未来更远的载人深空探测做技术储备和验证,因此,载人小行星探测目前已成为目前各国研究的热点,各研究机构和组织纷纷开展了总体方案及关键技术研究。
载人小行星探测任务的核心是飞行模式研究与选择,本文通过对载人小行星探测任务特点分析,提出了3种典型的载人小行星探测飞行模式,并对不同飞行模式下速度增量、任务时间、飞行器系统规模以及推进剂选择进行了分析,并结合任务窗口、交会对接难度、任务支撑能力和安全性等方面给出最优的载人小行星探测飞行模式选择和建议。
1 载人小行星探测任务特点
载人小行星探测可分为访问式探测和捕获式探测两类[4,8]:①访问式探测任务时间及航程相对较长,但可选择目标星范围较广,如初期可选择较大规模小行星,利于发现与观测,获得小行星特性并为后续长周期载人深空探测提供支撑;②捕获式探测任务时间和航程较短,但发现、探测与捕获难度大,可选择捕获小行星范围有限,只能选择较小规模小行星[8-9],因此相对于访问式探测实现难度更大,本文重点对访问式小行星探测飞行模式开展研究。编号为“2007SQ6”的小行星作为本文载人小行星探测飞行模式分析的假想目标星,任务时间段在2020年~2030年期间。
由于载人小行星探测任务距离远、速度增量大、任务周期长,采用单级飞行器很难直接完成探测任务,因此飞行器需要采用多级舱段直接组合发射或空间交会对接的方式实现探测任务[10-11]。与无人探测不同,载人小行星探测为适应长期的宇宙航行任务,需要为航天员提供能够居住、工作和生活空间,即生活舱;为完成载人探测任务,需要利用探索飞行器携带航天员靠近或着陆小行星,对小行星进行实地探测;为完成返回地球任务,需要具备返回再入大气层功能的载人飞船携带航天员和采集样本;同时为了提供有效和足够的逃逸速度增量,需要提供推进飞行器(以下简称推进舱)。因此,考虑载人小行星探测飞行器系统分为4个基本功能模块,即生活舱、探索飞行器、载人飞船和推进舱。
由于星际往返航行段和小行星探测段的飞行方案较固定,对系统速度增量变化影响较小[12],因此本文重点讨论在地球影响球内轨道段的飞行模式,不同的交会对接和逃逸方式将影响飞行模式的选择。目前考虑的飞行模式包括近地组装发射飞行模式、日地L2点停泊飞行模式、地月L1/L2点停泊飞行模式。对于飞行器速度增量的提供方式,采用小推力模式将导致飞行器的飞行任务周期大幅增加,但可以节省推进剂的质量,因此上述3种飞行模式载人飞行过程以化学推进模式为主,无人飞行过程中引入能够提供小推力的电推进模块[13]。
2 载人小行星探测飞行模式研究
2.1 近地组装飞行模式
基于近地组装的载人小行星探测飞行模式是指利用2枚或2枚以上运载火箭将飞行器分开发射进入近地轨道,通过一次或多次对接形成组合体后实现逃逸,完成探测任务。采用该模式,可以将航天员和飞行器所需载荷和燃料分别送入近地轨道,从而降低任务对单枚运载火箭运载能力的过高需求,如可利用一枚运载能力较小的载人运载火箭将载人飞船发射至近地轨道,从而避免使用重型载人运载火箭,大大降低运载火箭的技术风险、研制成本与研制难度。
如图1和表1、表2所示,基于近地组装的载人小行星探测飞行模式具体如下:①推进舱(含第一级、第二级和第三级)、生活舱和探索飞行器组成的无人飞行器组合体由重型货运运载火箭发射进入近地停泊轨道;②载人飞船(含返回舱和推进模块)由一枚载人运载火箭发射进入近地停泊轨道;③载人飞船作为主动飞行器与无人飞行器组合体完成近地轨道交会对接,形成载人飞行器组合体;④到达预定的转移窗口,推进舱第一级、第二级先后点火,载人飞行器组合体进行地球逃逸,达到逃逸速度后,进行推进舱第一级和第二级分离;⑤星际航行阶段利用推进舱第三级进行轨道中途修正;⑥到达小行星附近,利用推进舱第三级进行制动,将载人飞行器组合体送入环小行星轨道后,抛掉推进舱第三级;⑦探索飞行器与飞行器组合体分离,着陆或附着在小行星表面,开展载人小行星探测;⑧探索飞行器与飞行器组合体对接,完成人员与货物转移后,进行探索飞行器分离,利用载人飞船推进模块加速使载人飞行器组合体从小行星附近逃逸,进入地球返回轨道;⑨进行载人飞船分离,载人飞船返回舱再入地球大气层,在着陆场安全着陆。

图1 基于近地组装的载人小行星探测飞行模式Fig.1 Flight mode of manned asteroid exploration based on earth orbit rendezvous
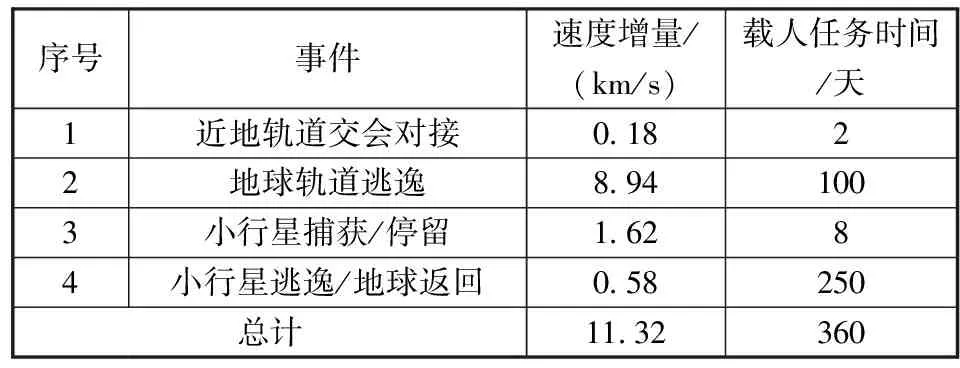
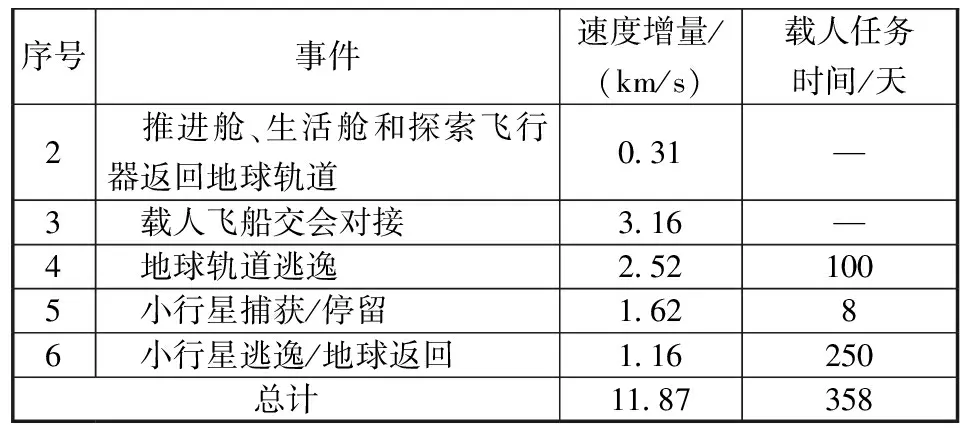
表1 基于近地组装的飞行模式各阶段速度增量和任务时间

表2 基于近地组装的飞行模式飞行器系统规模及推进剂比冲选择
可以看出,根据任务时间和探测距离的不同,基于多次发射、多次近地轨道交会对接的载人小行星探测飞行模式具备可行性。但随着交会次数的增加,对发射窗口要求增高,以及短期连续发射任务增加了对发射场任务保障能力的要求。
2.2 日地L2点停泊飞行模式
日地L2点是日地系统的5个平衡点之一,具有良好的动力学特性,位于日地L2点的物体保持与地球和太阳的相对位置不变。基于日地L2点停泊的载人小行星探测飞行模式是指将无人飞行器组合体长期停泊于日地L2点,需要执行任务时利用流形返回至地球附近,与从地球发射的载人飞船完成交会对接形成载人飞行器组合体后进行地球逃逸,开展载人小行星探测任务。在组合体返回地球时载人飞船进行分离并再入地球;其余舱段通过少量速度修正借助流形返回L2点停泊轨道,等待下一次探测任务,后续可利用无人补给飞行器对组合体补充燃料和生活物资。
如图2和表3、表4所示,基于日地L2点停泊的载人小行星探测飞行模式具体如下:①推进舱(含化学推进模块和电推进模块)、生活舱和探索飞行器形成无人飞行器组合体长期停泊于日地L2点附近轨道,执行探测任务时接近地球,进入近地轨道;②载人飞船(含返回舱和推进模块)由一枚重型载人运载火箭发射,进入近地轨道;③载人飞船作为主动飞行器,与无人飞行器组合体完成交会对接,形成载人飞行器组合体;④由推进舱对载人飞行器组合体施加逃逸脉冲,实现地球逃逸;⑤星际航行阶段利用载人飞船推进模块进行中途修正;⑥到达小行星附近,利用载人飞船推进模块进行制动,将载人飞行器组合体送入环小行星轨道;⑦探索飞行器与载人飞行器组合体分离,着陆或附着在小行星表面,开展载人小行星探测;⑧探索飞行器与飞行器组合体对接,完成人员与货物转移后,进行探索飞行器分离,利用载人飞船推进模块加速使载人飞行器组合体从小行星附近逃逸,进入地球返回轨道;⑨进行载人飞船分离,载人飞船返回舱再入地球大气层,在着陆场安全着陆;⑩推进舱、生活舱和探索飞行器组成的无人飞行器组合体施加速度修正,返回日地L2点附近,等待下一次任务。
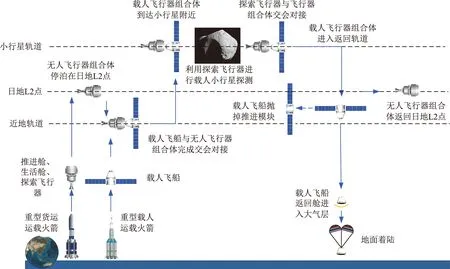
图2 基于日地L2点停泊的载人小行星探测飞行模式Fig.2 Flight mode of manned asteroid exploration based on berth in L2 of sun-earth system

表3 基于日地L2点停泊的飞行模式各阶段速度增量和任务时间
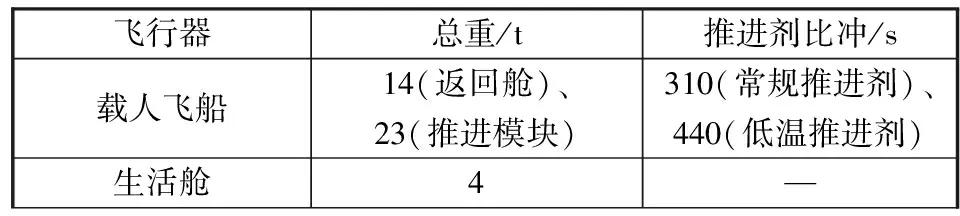
表4 基于日地L2点停泊的飞行模式飞行器系统规模及推进剂比冲选择

续 表
基于日地L2点停泊的载人小行星探测飞行模式充分利用了日地L2点的物理特性,可以节省飞行器交会对接后所需的逃逸速度增量,同时仅需重型货运运载火箭对推进舱、生活舱和探索飞行器进行一次发射,即可满足多次的任务需求,实现重复利用。在开展多次探测任务的背景下,节约成本的同时降低了发射场连续发射的压力,但载人飞船与无人飞行器组合体进行交会对接时绝对速度较大,载人飞船在交会前需提前加速、对接准备时间短,给地面测定轨带来较高要求,对接失败后也无法提供更多机会重新进行交会,因此交会对接具有很大的难度和危险性。另一方面,无人飞行器组合体虽然从日地L2点附近周期轨道借助流形可以实现低能量转移,但转移时间较长,初次入轨的能量消耗较大。
2.3 地月L1/L2点停泊飞行模式
地月L1/L2点停泊点飞行模式与日地L2点停泊点飞行模式相似:选择地月L1/L2点作为停泊点,无人飞行器组合体在地月L1或地月L2点附近保持与地球和月球的相对位置不变,需要执行任务时利用流形返回至地球附近,与从地球发射的载人飞船完成交会对接形成载人飞行器组合体后实现地球逃逸,开展载人小行星探测任务。在组合体返回地球时载人飞船进行分离并再入地球;其余舱段通过少量速度修正借助流形返回地月L1/L2点停泊轨道,等待下一次探测任务,后续可利用无人补给飞行器对组合体补充燃料和生活物资。
如图3和表5、表6所示,基于地月L1/L2点停泊的载人小行星探测飞行模式具体如下:①推进舱(含低温推进模块和电推进模块)、生活舱和探索飞行器形成无人飞行器组合体长期停泊于地月L1/L2点附近轨道,执行探测任务时接近地球,进入近地轨道;②载人飞船(含返回舱和推进模块)由一枚重型载人运载火箭发射,进入近地轨道;③载人飞船作为主动飞行器,与无人飞行器组合体完成交会对接,形成载人飞行器组合体;④由推进舱对载人飞行器组合体施加逃逸脉冲,实现地球逃逸;⑤星际航行阶段利用载人飞船推进模块进行中途修正;⑥到达小行星附近,利用载人飞船推进模块进行制动,将载人飞行器组合体送入环小行星轨道;⑦探索飞行器与载人飞行器组合体分离,着陆或附着在小行星表面,开展载人小行星探测;⑧探索飞行器与飞行器组合体对接,完成人员与货物转移后,进行探索飞行器分离,利用载人飞船推进模块加速使载人飞行器组合体从小行星附近逃逸,进入地球返回轨道;⑨进行载人飞船分离,载人飞船返回舱再入地球大气层,在着陆场安全着陆;⑩推进舱、生活舱和探索飞行器组成的无人飞行器组合体施加速度修正,返回地月L1/L2点附近,等待下一次任务。
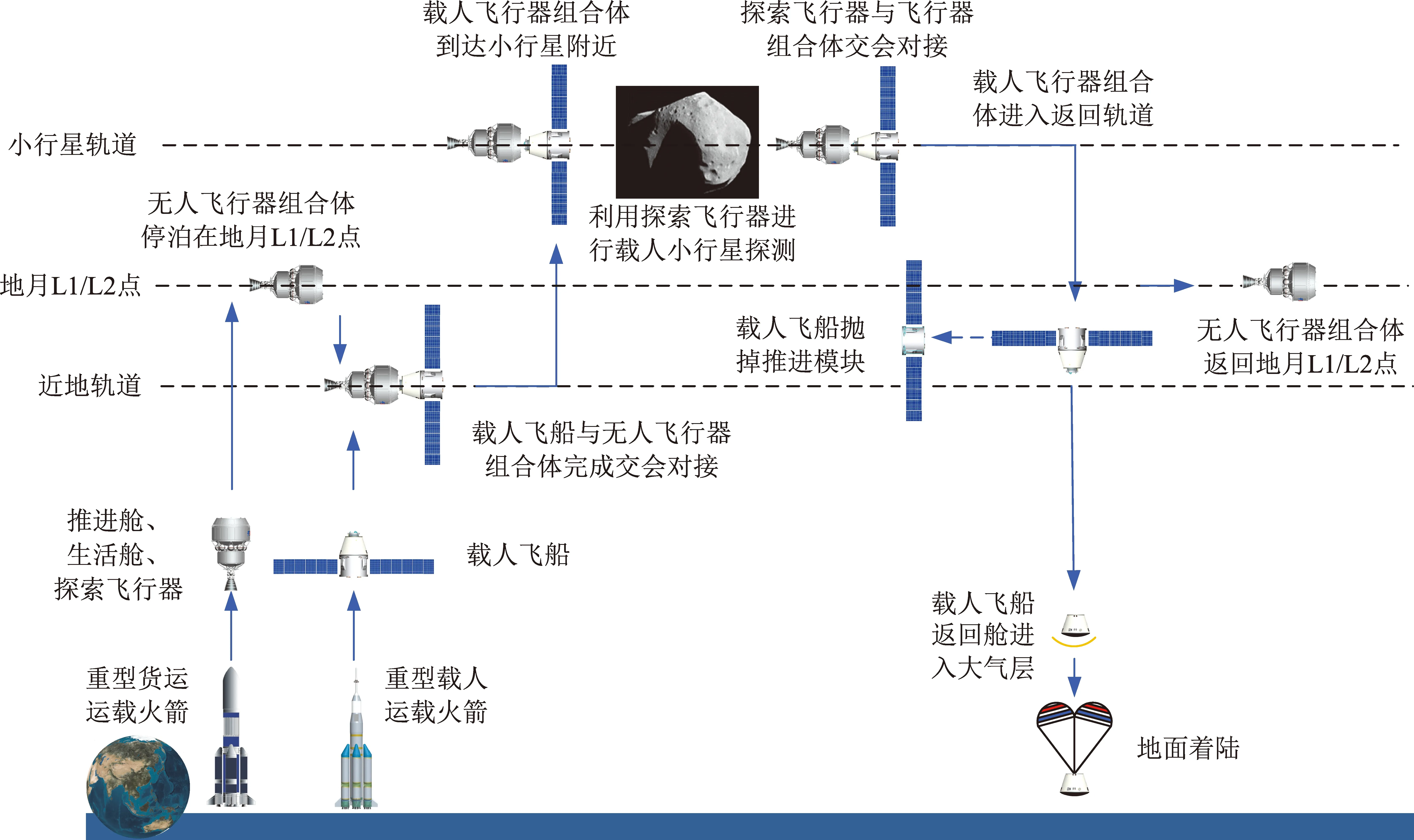
图3 基于地月L1/L2点停泊的载人小行星探测飞行模式Fig.3 Flight mode of manned asteroid explorationbased on berth in L1/L2 of earth-moon system

表5 基于地月L1/L2点停泊的飞行模式各阶段速度增量和任务时间
续 表

表6 基于地月L1/L2点停泊的飞行模式飞行器系统规模及推进剂比冲选择
基于地月L1/L2点停泊的载人小行星探测飞行模式的系统组成和功能以及主要阶段与日地L2点停泊的飞行模式相同。相比日地L2点,地月L1/L2点距离地球较近,停泊在地月L1/L2点除可完成小行星探测任务外,对载人月球探测也可提供中转和系统支持。但由于地月L1/L2点相对于地月旋转系静止,而在日地系下运动,因此由推进舱、生活舱和探索飞行器组成的无人飞行器组合体再入地球和返回地月L1/L2点时受星历约束较大,可能无法找到低能量的转移轨道,需要增加中间脉冲才能接近近地轨道,相比日地L2点飞行模式需要增加推进剂的消耗量。
3 飞行模式分析与选择
如表7所示,载人小行星探测可分为直接奔向小行星的飞行模式(近地轨道组装)和基于高势能点(日地L2点停泊、地月L1/L2点停泊)的飞行模式,前者在近期可实现程度高,需要突破长期深空居住、低温推进、先进能源、小行星附着与着陆等载人小行星探测通用关键技术之外,没有其它亟需突破的关键技术;而基于高势能点的飞行模式可通过含小推力电推进模块的推进舱将无人飞行器部分送入高势能点,从而大大降低飞行器系统总规模,是未来载人小行星探测的发展方向,但需在突破载人小行星探测通用关键技术的基础上,亟需解决高速交会对接和电推进的难题。
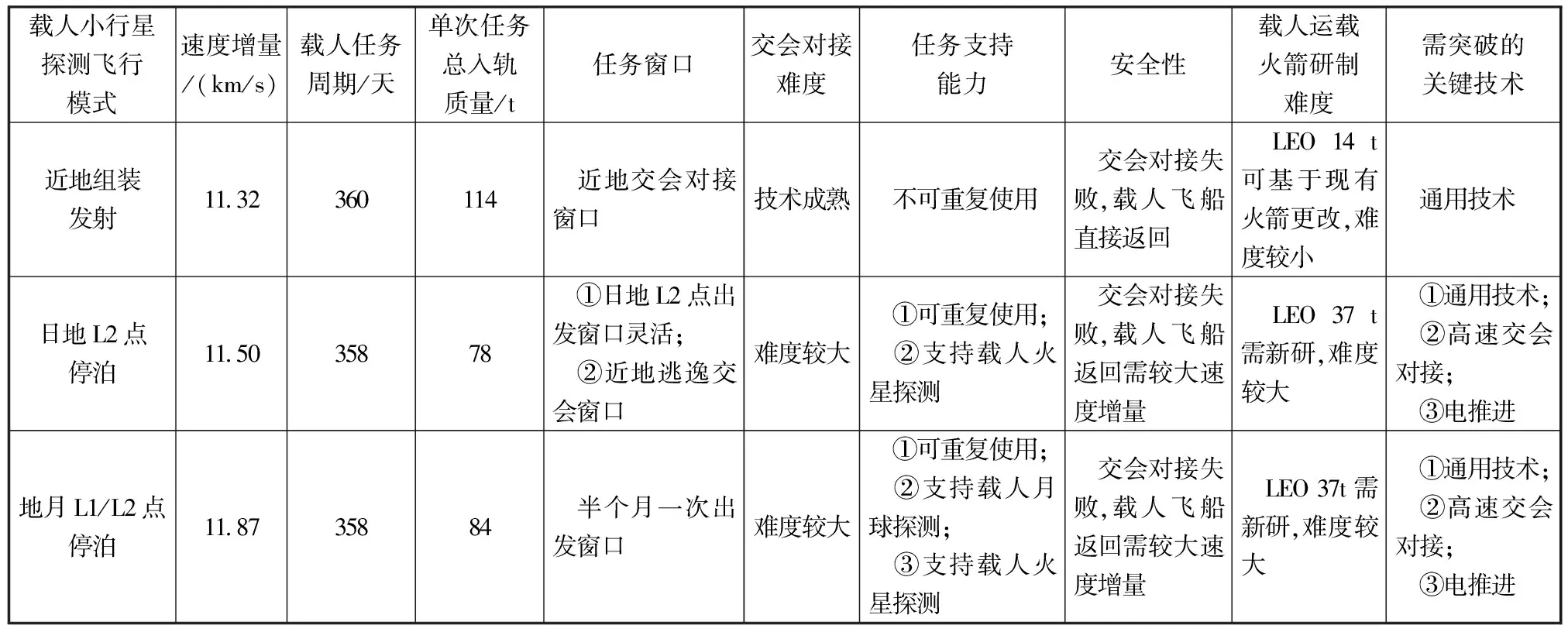
表7 不同载人小行星探测飞行模式比较分析
不同飞行模式的对比分析具体如下:
①基于近地轨道组装的载人小行星探测飞行模式实现难度较低、技术继承性、安全性较好,如载人飞船和载人运载火箭可直接采用现有成熟飞行器,近地轨道载人交会对接也经历了“921”二期工程的多次成功验证,此外,如果重型货运火箭研制难度大,可采用多次近地轨道交会对接的方式完成任务,因此该模式是基于现有技术水平在近期内实现载人小行星探测任务的合理选择;②日地L2点停泊飞行模式中,系统规模小,任务窗口灵活,并且主要飞行器可实现重复使用,对于多次小行星探测任务,运行成本相对较低,且可支持载人火星探测等后续载人深空探测任务,是载人小行星探测发展路线的合理选择;③基于地月L1/L2点停泊的飞行模式虽然支持多种载人深空探测飞行任务,但其任务窗口灵活性差,对行星际探测约束较大,此外相对于日地L2点停泊飞行模式其速度增量相对较大,系统规模以及后续运营成本都将大幅增加。
4 结束语
开展载人小行星探测任务的首要技术是飞行模式的选择,合理的飞行模式对载人小行星探测飞行器系统规模和任务复杂性有着至关重要的影响。基于载人小行星探测的任务特点,通过对近地组装、日地L2点停泊、地月L1/L2点停泊的载人小行星探测飞行模式的对比分析可知:
(1)基于现有航天技术水平,可采用近地轨道组装的飞行模式作为先导开展载人小行星探测任务;
(2)随着载人小行星探测范围不断拓展,逐步以日地L2点作为未来载人小行星探测的中转站,选择日地L2点停泊的飞行模式开展载人小行星探测任务,以及后续更为广泛的载人深空探测任务。
猜你喜欢
今日农业(2022年2期)2022-11-16
凤凰动漫(军事大王)(2022年1期)2022-04-19
军民两用技术与产品(2021年10期)2021-03-16
北京航空航天大学学报(2020年3期)2021-01-14
环球时报(2020-12-15)2020-12-15
中学课程辅导·教育科研(2019年3期)2019-09-10
小哥白尼·趣味科学画报(2019年12期)2019-02-28
太空探索(2016年1期)2016-07-12
小朋友·快乐手工(2015年5期)2015-06-06
小雪花·初中高分作文(2009年7期)2009-11-16