
直驱风电机组附加惯性和桨距角减载联合频率控制策略
2019-11-11 09:13王印松李牡丹
山东电力技术 2019年10期
李 昊,王印松,李牡丹
(1.华北电力大学 控制与计算机工程学院,河北 保定 071003;2.华北电力大学科技学院,河北 保定 071003)
0 引言
近些年来,全球风力发电迅猛发展,装机容量和发电量占比大幅度提升,成为新能源中最具发展潜力的发电技术[1]。由于风电机组和电网频率解耦,不能像常规发电机组一样为电力系统提供频率支撑,风电渗透率的增加将会对电力系统的稳定运行带来挑战[2],使得风电机组的频率控制策略研究成为当前的一个热点。
和双馈异步电机相比,直驱永磁同步电机采用永磁体励磁,省去了齿轮箱,具有结构简单、维护成本低、可靠性高等优点[3-4],在风力发电领域变得越来越受欢迎。
为了使风力发电机组参与系统的频率调整,国内外学者针对风电机组的频率控制策略进行了深入研究。当前风电机组主要的频率控制策略有附加惯性控制、超速减载控制、变桨减载控制以及频率的综合控制策略。文献[5]在最大功率跟踪策略的基础上增加了附加惯性控制,证明了风电机组可以通过释放或者吸收转子动能来响应系统频率的变化。文献[6]在RT-LAB 上搭建了双馈感应电机附加惯性控制的半实物仿真平台,验证了附加惯性控制能够有效地提高双馈感应电机并网的频率适应性,然而并没有考虑转速下跌所导致的失速问题以及转速恢复带来的频率跌落问题。文献[7]在附加惯性控制系统的基础上增加了转速保护、转速延时恢复模块,证明了风电场在一定程度上可以参与系统的频率响应。但是附加惯性控制只能在频率变化的初期提供短暂的支撑,不能提供长期有效的支撑,为此,文献[8]采用桨距角减载控制使风力发电机组预留备用功率,同时结合附加惯性控制,能够同时降低系统频率的初始变化率和稳态偏差,但是通过仿真求得桨距角和减载水平的函数关系存在着精度限制。文献[9]采用超速减载控制预留备用功率,同时和附加惯性控制相结合,能够有效地支撑系统的惯性调频,减小频率的稳态偏差,但是当转速达到额定转速的时候,该策略便不能实现有效减载。文献[10]将附加惯性控制、超速减载控制、变桨减载控制相结合,充分发挥不同控制策略的优点,实现了全风速范围内的频率调节,但是也增加了系统设计的复杂度。
首先建立D-PMSG 的简化模型,分析不同风速下风电机组的运行状况;研究附加惯性控制策略的结构和原理;分析桨距角减载控制的原理,针对文献[8]、[10]中桨距角和减载水平关系难以确定的问题,提出一种改变功率设定值的桨距角减载频率控制策略;最后将附加惯性控制和所提出的桨距角减载频率控制相结合,并通过仿真验证了控制方法的有效性。
1 D-PMSG 简化模型及控制策略
1.1 风力机模型
由贝兹理论可知,风轮从风中捕获的风能是有限的,其捕获的机械功率可以描述如下[11]:
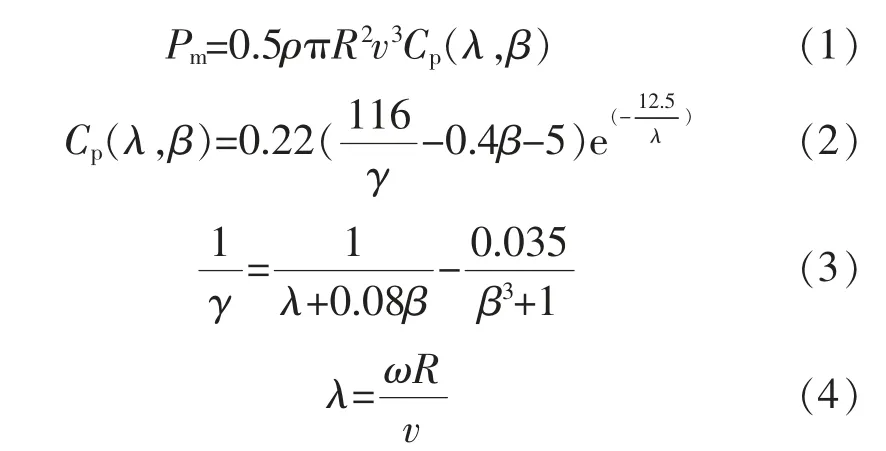
式中:ρ 为空气密度;R 为风轮半径;v 为风速;Cp为风能利用系数;λ 为叶尖速比;β 为桨距角;ω 为风轮转速。
风力机产生的机械转矩为

1.2 轴系模型
考虑到时间效率和精度,忽略传动轴的扭转效应和机械损耗,将风力机和发电机转子等效为单质块模型[12],如式(6)所示。

式中:Te为发电机的电磁转矩;J1为发电机等效的转动惯量。
1.3 发电机及变流器简化模型
由于风电机组的电磁暂态过程远远小于机电暂态过程,在研究风电机组有功功率控制和频率控制问题的时候,可以将发电机和变流器简化为一阶惯性环节[13]:

式中:T 为发电机和变流器的等效时间常数;Pe为风电机组输出的电磁功率;Popt为最大功率跟踪控制下的发电机的最优参考功率。
1.4 最大功率跟踪和变桨控制
为了避免使用风速传感器,采用功率曲线反馈法实现风电机组的最大功率跟踪控制。该方法根据实发功率将转速调整为最优转速ωopt,使风机达到最佳叶尖速比λopt,进而得到最大风能利用系数Cpmax,得到最优参考功率Popt。最大功率跟踪控制下的最优参考指令为[14]

变桨控制系统采用传统PID 控制器实现。当输出功率小于额定功率Pn时,桨距角为0,风电机组输出最大功率。当输出功率大于额定功率Pn时,通过PID 控制器调节桨距角减小风能利用系数,使风电机组的输出功率始终保持在额定功率处。直驱永磁风电机组的简化模型结构如图1 所示[15]。
1.5 不同风况下风电机组的运行状况
D-PMSG 在不同的风速下所采取的控制策略不同,输出功率也不同。通常包含以下4 个区域:当v<vcut-in时,风电机组工作在启机区;当vcut-in≤v<vn时,风电机组工作在最大功率跟踪区;当vn≤v<vcut-out时,风电机组运行在恒功率区;当v≥vcut-out时,风电机组运行在停机区。风电机组的运行状况如图2 所示。

图1 直驱风电机组简化模型结构
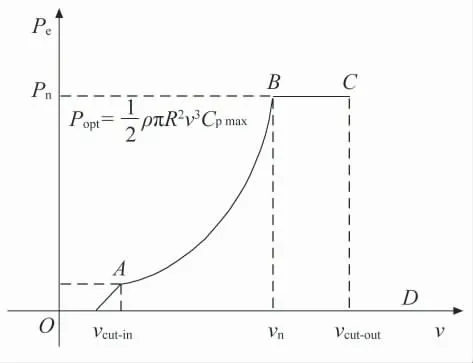
图2 风电机组运行状况
不同风速区域下,风电机组的输出功率为
式中:vcut-in为切入风速;vn为额定风速;vcut-out为切出风速。
2 附加惯性控制
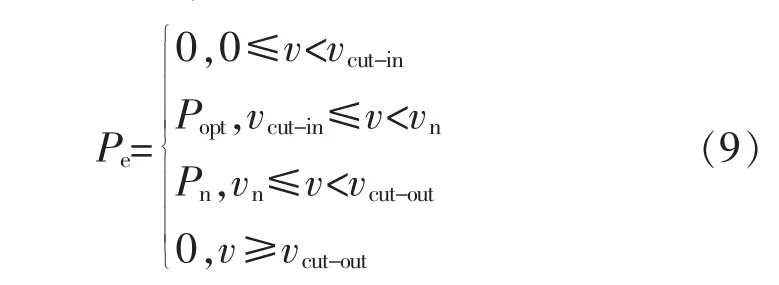
直驱风电机组采用最大功率跟控制策略和全功率变流器并网,不能够响应系统频率的变化,无法为系统提供频率支撑。风力发电机组转子蕴含的动能和同容量的传统同步发电机组一样多[16],为了使风电机组能够像传统同步发电机组在频率变化时具有惯性响应特性,在风电机组上最大功率跟踪控制基础上增加附加惯性控制环节,D-PMSG 的附加惯性控制环节如图3 所示[11]。
附加惯性控制环节由低通滤波器、高通滤波器、下垂控制回路(上)、虚拟惯量回路(下)4 部分组成。低通滤波器用来滤除测量噪声的干扰,高通滤波器用来阻断稳态的输出,保证风电机组转速平稳恢复。下垂控制回路模拟传统等值同步电机的静态特性,增发与频率偏差成比例的功率,虚拟惯量回路用来模拟传统等值同步电机的惯性特性,增发与系统频率微分成比例的功率。转速保护模块保证风电机组在转子转速低于0.7ωn时退出附加惯性控制,防止转速过低而导致切机事故。
附加惯性环节得到的参考功率指令Pf为

式中:kp为附加惯性控制的比例系数;kd为附加惯性控制的微分系数。
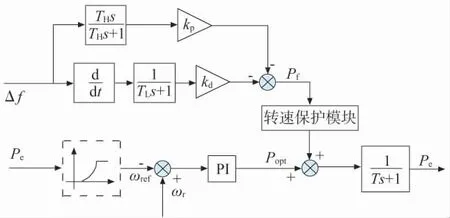
图3 附加惯性控制原理结构
3 直驱风电机组桨距角减载频率控制
由于附加惯性只能提供短暂的频率支撑,不能够减小系统频率的稳态偏差,改变桨距角的大小可以使风电机组预留备用功率,为系统频率提供长期有效的支撑。图4 绘出了风电机组桨距角减载控制的原理,从图中可知,当风电机组的最大功率跟踪曲线系数不变时,在风速v1下,桨距角从β1减小至β0,可以使风电机组的稳定运行点由点B 移动至点A,增加ΔP1的输出功率。桨距角从β1增加至β2,可以使风电机组的稳定运行点由点B 移动至点C,减少ΔP2的输出功率。
将减载水平d 定义为采用桨距角控制使风电机组减发的功率占当前风速下最优输出功率Popt或者额定输出功率Pn的百分比[17]。由于桨距角和减载水平之间存在着严重的非线性,为了能够实现精确减载,当前文献多通过仿真的方法得到不同风速下初始桨距角和减载水平的对应关系,实现困难,并且存在着精度限制。为此提出了一种通过改变功率设定值的桨距角减载频率控制策略,其控制结构如图5所示。

图4 桨距角减载控制原理
根据风电机组运行的区域,在最大功率跟踪区将功率的参考值设定为(1-d)Popt实现风电机组的减载运行,在恒功率区将功率的参考值设定为(1-d)Pn实现风电机组的减载运行,从而预留出备用功率。当频率发生变化时,按照图6 对功率的参考值进行调整,从而改变输出功率参与系统频率的调整。

图5 桨距角减载频率控制结构

图6 频率-功率参考值关系
当频率的偏差Δf 在fdead--fdead+时,风电机组的输出功率参考值为Pref=Pd,保证风电机组有效减载;当频率的偏差Δf 在fdead+-f+时,风电机组的输出功率参考值为减小风电机组的输出功率;当频率的偏差Δf 在f--fdead-时,风电机组的输出功率参考值为增加风电机组的输出功率。当频率的偏差小于f-或者大于f+时,分别将输出功率的参考值设置为P0%、P2d参与系统频率的响应。
4 仿真分析
为了验证所提出的联合频率控制策略的正确性,基于简化的风电机组模型,在SIMULINK 上搭建了如图7 所示的仿真系统。该系统由1 台2 MW 的D-PMSG 和1 台等值同步发电机组组成。仿真系统基于标幺值搭建,仿真结果采用有名值表示。

图7 系统仿真结构
取风速v1为10 m/s,风电机组减载水平d=10%,系统初始频率平衡,在50 s 时,系统的负荷突增0.4 MW,系统在不同控制策略下的频率响应如图8所示,频率响应的部分响应数据如表1 所示。

图8 不同控制策略下的频率响应
从图8 和表1 中的数据可以得到,和最大功率跟踪控制相比,附加惯性控制使系统频率的最低值增加了0.23 Hz,系统频率到达最低值的时间增加了0.56 s,有效地减小了系统频率跌落幅度和变化率,但是对系统频率的稳态值并没有作用;采用桨距角减载频率控制,系统频率的最低值增加了0.07 Hz,到达最低值的时间减小了0.06 s,系统频率的稳态值增加了0.12 Hz,桨距角减载频率控制对系统频率的暂态响应影响较小,但是可以有效地改善系统频率的稳态响应;联合频率控制策略使系统频率的最低值增加了0.23 Hz,到达最低值的时间增加0.52 s,系统频率的稳态值增加了0.12 Hz,结合了附加惯性控制和桨距角减载频率控制的优点,有效地改进了系统频率的动态偏差和稳态偏差。

表1 不同控制策略下的频率响应
图9 分别对比了风电机组的参考功率、桨距角、转速和输出功率的响应。从图9 中可以看到,采用最大功率跟踪控制,风电机组的各个变量保持恒定不变,不参与系统频率的响应;采用附加惯性控制,风电机组参考功率保持不变,桨距角为0,在负荷发生变化时,转子转速迅速下跌,释放转子动能,增加输出功率参与系统频率的响应;采用桨距角减载频率控制,风电机组通过设定参考值来实现精确减载,当负荷发生变化时,风电机组的参考功率值增加,桨距角减小,转速上升,输出功率缓慢增加至最优输出功率,为系统频率提供长期稳定的支撑;采用联合频率控制,两种控制策略共同作用,使风电机组的初始时刻的转速下降,增加初始时刻的输出功率,改善系统频率的初始值和初始跌落速率,参考功率增加,桨距角减小,使输出功率最终增加至最优功率,为系统频率提供长期的频率支撑。
在负荷突减的情况下,仿真结果类似,不再赘述。
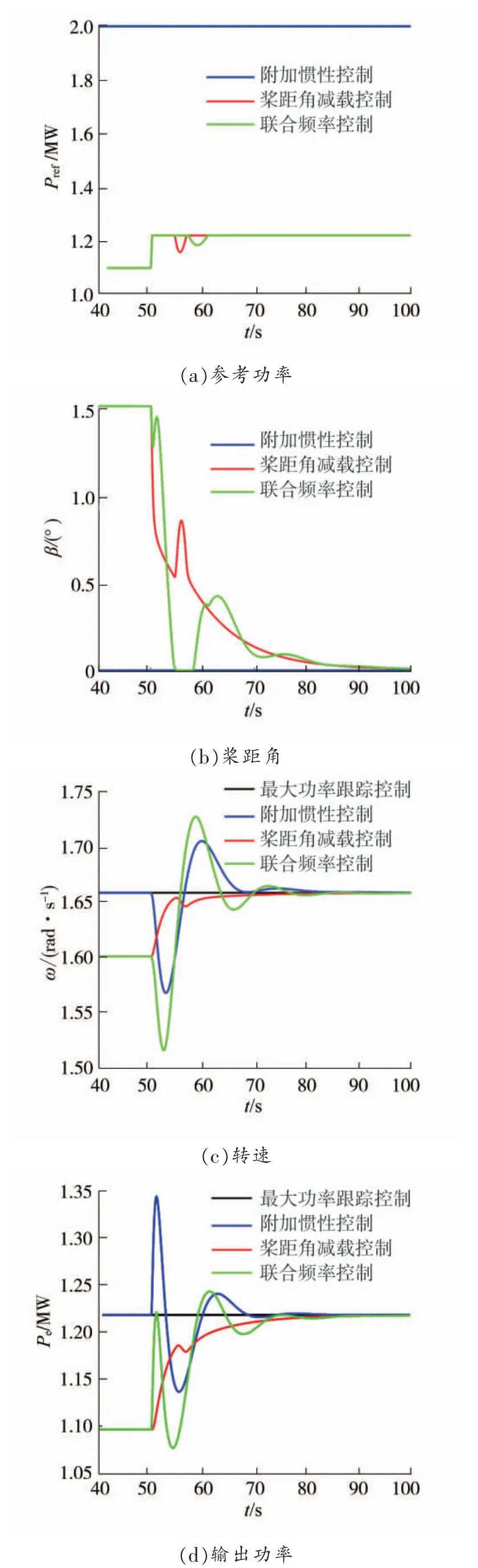
图9 风电机组输出变量响应
5 结语
提出了一种附加惯性和桨距角减载联合频率控制策略。仿真结果表明:附加惯性控制能够有效地减小系统频率的跌落幅度和跌落速率;所提出的桨距角减载频率控制能够有效准确地实现风电机组的减载运行,为系统提供长久的频率支撑,改变系统频率的稳态偏差;联合频率控制策略结合了附加惯性控制和桨距角减载控制的优点,既能够减小系统频率的跌落幅度和跌落速率,同时能够增加系统频率的稳态偏差,改善系统的频率响应。
猜你喜欢
动力工程学报(2022年10期)2022-10-19
电力科学与工程(2022年9期)2022-10-10
电力建设(2022年7期)2022-07-04
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
太阳能(2022年2期)2022-03-07
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
东方汽轮机(2020年3期)2020-11-04
军民两用技术与产品(2016年3期)2016-01-05
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
