基于Jetson TX1的应急救援车辆远程可视化监测系统
2019-11-15 10:23王新晴李玉阳华夏俞垚魏
电子技术与软件工程 2019年19期
文/王新晴 李玉阳 华夏 俞垚魏
为了解决当前救援,特别是山区的抢险救灾中的人员无法及时到达以及救援人员受到威胁的问题,在未来一段时间内无人化将作为应急救援装备的一个重要的发展趋势。但是当前救援车辆完全依靠自己“智能”控制自己还尚未成熟,因而发展远程遥控救援车辆能够有效解决当前在救援过程中所遇到的问题。本文采用无线电通讯技术设计的应急救援车辆的监控系统,能够实现对救援场地的视频监控以及周边地形的显示,促进无人应急救援车辆的研究。
1 应急救援车辆监控系统整体设计
急救援车辆远程环境监控系统包含TX1、32线激光雷达和无线电台等部分,系统整体框架如图1所示。
应急救援车辆环境监控系统的一体机是整个系统的监控中心,负责对救援车辆的行走和周围环境的监控。云台摄像机、32线激光雷达布置、GPS天线、电台天线安装在救援车辆的车顶,并且激光测距仪器固定在云台摄像机上,32线激光雷达安装在云台摄像机的顶部,如图2。
32线激光雷达、云台摄像机以及激光测距仪为操作人员提供周边环境信息。为救援车辆趴坡、越障、实施救援等行动提供监控。救援车辆采用图传电台和数传电台将图像信息和车辆其他返回信息以电磁波的形式传给电台接收机,图传电台接收机、2个数传电台接收机分别通过HDMI、RS232、RS485将视频和数据传送给接收端,接收端指令是通过RS232、RS485传送进入数传电台的。
高机动、多功能是应急救援车辆的关键指标[1]。根据地震等灾害现场需求,其应具备挖掘、冲击、剪切、扩张、切割五种机具快换功能,以应对多种救援场合;当出现江河阻隔、地面塌陷、火势包围等导致水陆不通时,果断实施超低空投放,争取救援时间。
本文中采用的应急救援车辆是步履式挖掘机,如图3,步履式挖掘机是一种多功能、步履复合的液压挖掘机 [2]。但是不具备空调输送、多功能、无人化行走和作业能力。结合步履式挖掘机出色的山地越障能力,对其进行改造。
2 主控制单元
目前视频监控系统研究的有很多,如许艳梅的基于LabVIEW的移动机器人远程网络监控系统[3]、王军伟的基于嵌入式ARM的远程视频监控系统研究[4]、李鹏的基于Web的家用机器人视频监控系统的设计与实现[5]以及 魏雅的基于云台的无线视频监管系统设计[6]等等,这些监控系统各有特点,但都无法试用与应急救援装备。
在选用Jetson TX1之前,本文调研了许多嵌入式板卡,例如ARM、赛灵思的ZedBoard、英伟达的Jetson TK1等等,目前有许多基于ARM开发的视频监控系统最终本文选择Jetson TX1有以下几点原因:首先,ARM公司的板卡内置的GPU性能不足以支撑需求;其次赛灵思的Zedboard板卡是基于FPGA的,目前开发起来很费时间;最后JetsonTK1是Jetson TX1的前身,英伟达在Jetson TX1在性能功耗上做的都比TK1好,所以文本最终选择Jetson TXl。

图1:应急救援车辆远程环境监控系统结构

图2:云台摄像机和32线激光雷达安装示意图
Jetson TX1是NVIDIA推出了一款小型Linux系统级嵌入式系统板卡[7]。Jetson TX1 SoM设计满足低功耗环境要求,集成:先进的3D图形、视频和图像处理、并行计算、机器视觉、机器学习能力、32bit和64bit的操作能力,除了性能和功耗,TX1还具有丰富的I/O、小尺寸,从而减少的系统集成的复杂度,TX1是很对应用的理想选择。包括:智能视频分析(IVA)、无人机、机器人、游戏设备、虚拟现实(VR)、增强现实(AR)、袖珍医学设备。
Jetson TX1采用了20纳米芯片技术,并且采用1024-GFLOP Maxwell GPU,64位四核ARM Cortex-A57和硬件H.265编码器/解码器构建而成,模块全大小为5Ox87mm,。板载组件包括4GB的LPDDR4、16GB eMMC闪存、802.11 ac WiFi、蓝牙4.0、千兆以太网,并接受5.5V-19.6VDC输入。接口方面,Jetson TX 1可以满足大多数场合的需求,在双ISP上可以同时接受多达6台MIPI CSI-2摄像机,具有2个USB3.0口,3个USB2.0口,PCIe接口,还有独立的HDMI 2.0 / DP 1.2和DSI/eDP1.4接口,还集成了3路SPI,4路I2C,3路UART,SATA,GPIO组成 [8]。Jetson TX1在空闲状态下功耗仅为1瓦或更低,正常CUDA负载下功耗约为8-10瓦,只有当模块充分利用时功耗高达15瓦。英伟达的Jetson TX1内部拥有自动调速器,可以根据自身的工作负载自动调节功率,或者通过用户命令来选通内核并指定时钟频率。四个ARM A57内核可以自动调节102MHz到1.9GHz之间的频率,内存控制器也可以从40MHz调节到1.6GHz,最为重要的是Maxwell架构的GPU可以从76MHz调节到998MHz,由此可以得出Jetson TX1比传统的CPU、GPU表现优秀很多。Jetson TX1内部资源如图4。

图3:步履式挖掘机
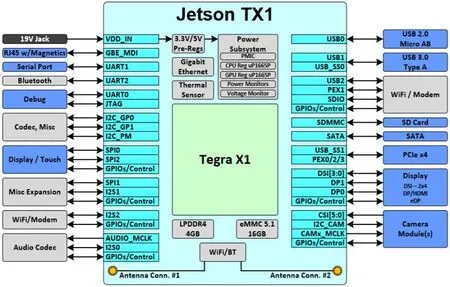
图4:Jetson TX1内部资源
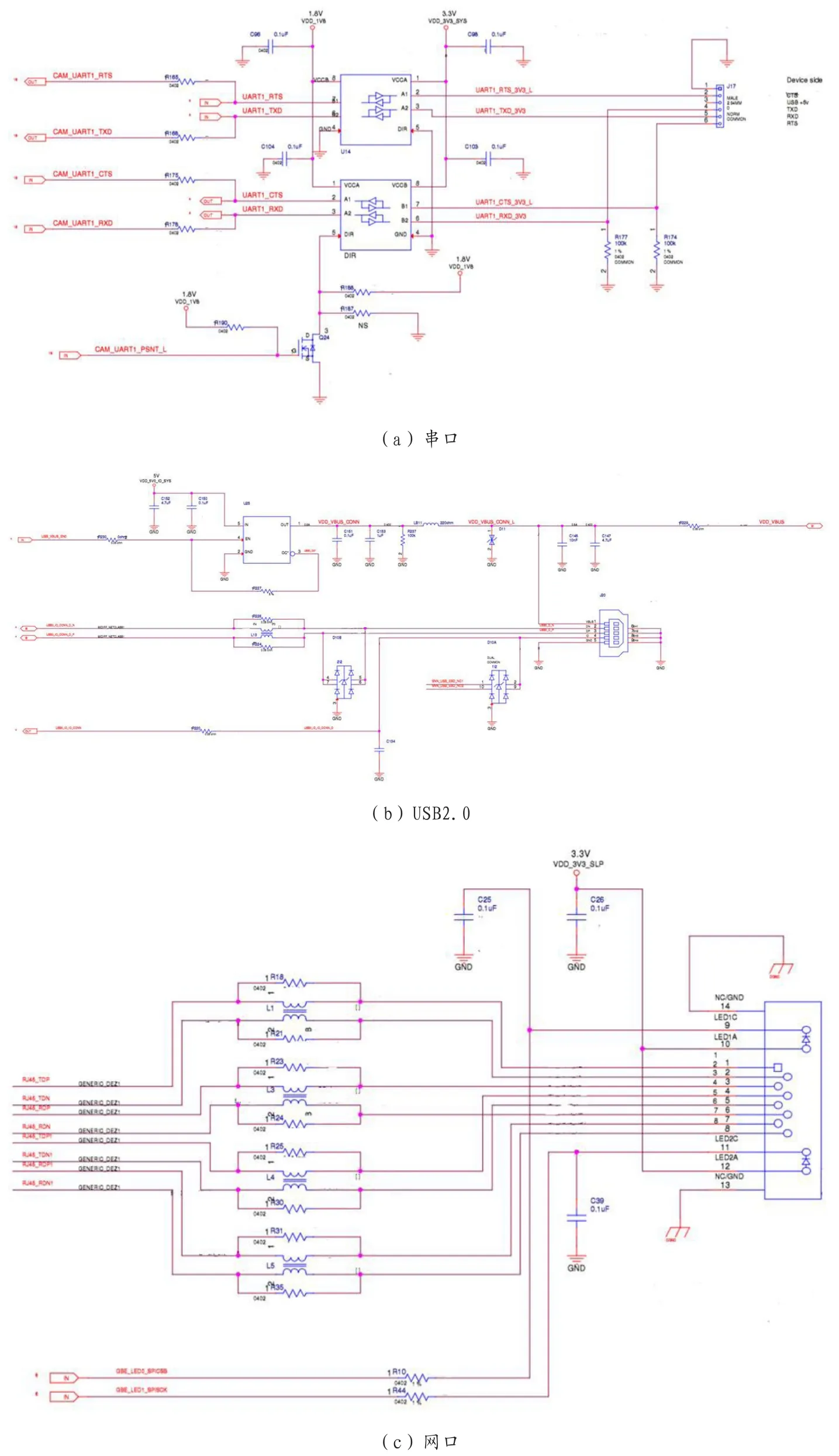
图5:电路原理图
在Jetson TX1中我们使用了2个UART、一个网口、一个USB。与Jetson TX1相接的开发板的电路原理图如图5。
3 外围设备
3.1 无线电台
应急救援车辆视频监控系统中的通讯部分采用了一对图传电台和一对数传电台,图传电台是将云台摄像机的视频传输到接收端的一体机,数传电台将车辆上仪器测得数据传输到接收端的一体机,并且将一体机发送的指令传输到车辆上系统中。
3.2 32线激光雷达
32线激光雷达可以为操作车辆的人员提供车周围环境更广阔地形环境的描述,可以使操作手为车辆选择到达目的地的大致路径[9]。而云台摄像机和激光测距可以为操作人员提供更具体的车辆周围地形信息。在操作人员通过云台摄像机了解周围地形操作时会产生视觉感官上的距离误差[10],因此为避免这种情况把激光测距仪安装在车顶上,这样可以得到具体的距离信息。图6中a图为32线激光雷达,b图为32线激光雷达点云图。
3.3 云台摄像机
云台摄像机常用于视频监控和目标跟踪。
作为智能化监控设备,选择的这款云台机身和外壳都采用高强度铝合金材料,而且采用抗强风结构设计,具有掉电自锁功能,内部结构采用抗震设计,能够满足一些特殊场合的应用,此云台具有可靠变速,360水平无限位连续旋转,自动扫描,自动巡航,守望,等功能,云台整体可选配防湿热、防盐雾、防尘、防腐蚀处理,保障云台在恶劣环境下能够正常使用。云台结构如图7。
3.4 全球卫星定位系统
轻巧便捷多系统高精度的接收机,兼容北/GPS/GLONASS/GALILEO四系统全频点。有丰富的通讯接口,包括串口、USB、以太网及CAN总线。图8为导航系统外观连接图。
4 应急救援车辆监控系统软件设计
4.1 视频监控系统软件设计
视频监控系统软件采用模块化的思想进行设计。该软件主要包括图像采集和各传感器数据采集等,设计流程如图9所示。
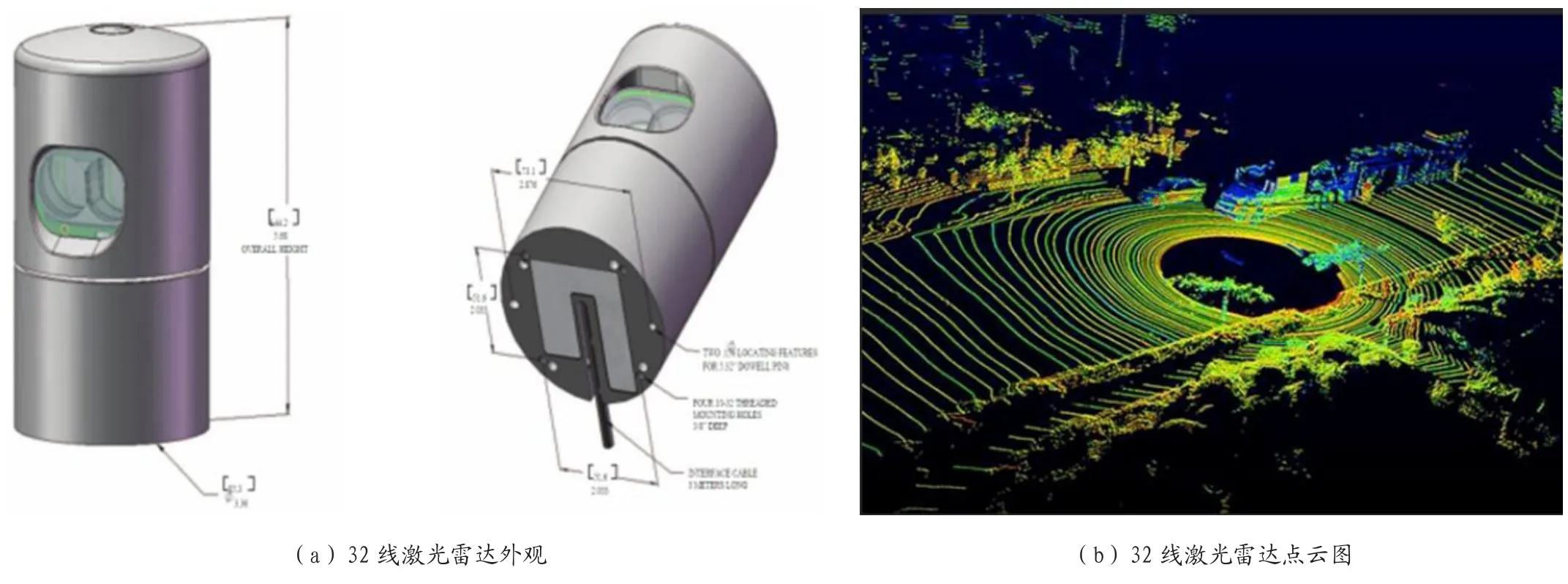
图6:32线激光雷达
视频监控系统的图像获取包括云台摄像头机和32线激光雷达两部分,二者实现了对HDMI和RS232的数据采集。应急救援车辆自身搭载的云台摄像机可以自主旋转,能够对对作业环境进行自动化图像扫描。
4.2 嵌入式linux系统搭建
NVIDIA JetPack SDK是构建应用程序的最全面的解决方案。本文使用JetPack安装程序来为提供最新的操作系统映像,为主机PC和开发者工具包安装开发工具,并安装用于启动开发环境所需的库和api、示例和文档。在给Jetson TX1系统配置的时候需要一台Linux主机进行辅助,主机和Jetson TX 1之间通过路由连接。安装步骤如下:
(1) Jetson TX1配置网络。
(2) Jetson TX1连接主机。
1.断开电源,保证开发板处于断电关机状态。
2.用网线连到路由器上,插上鼠标键盘。
3.用Micro USB线把开发板连到电脑上。
4.接通AC电源,按下Power键,开机。
5.长按Rec键不松开,然后点按一下Reset键,过2s以后,才松开Rec键,此时开发板处于强制恢复模式。
(3) Jetson TX1系统测试。
(4)更改系统设置,安装所需软件。
4.3 试验结果分析
在某校区进行了实际作业,以验证应急救援车辆监控系统是否满足远程监测功能,是否符合设计要求。结果表明:一体机的监测软件能够实现拍摄图片和录制视频等功能;实现云台摄像头和32线激光雷达画面的切换,同时,还可以根据监测到的环境信息,控制救援车辆避障。一体机监测软件实际监测画面如图10所示。

图7:云台摄像机
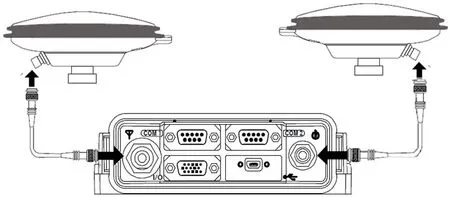
图8:GPS
试验表明:一体机的监测软件可以实现云台摄像头和32线激光雷达的监测,可以根据需求旋转摄像头。验证了系统的可行性和可靠性。
5 结语

图9:视频监控系统软件设计流程图

图10:监测软件实际监测画面
应急救援车辆远程视频监控系统运用了嵌入式Linux技术、图像采集和无线传输等技术,将视频监控和激光雷达应用于救援车辆中,可以实现对救援过程图像的实时显示,并能及时对救援中的紧急状况进行处理。采用无线电台技术,搭载高性能的Jetson TX1处理器,并结合Linux操作系统,实现了应急救援车辆远程视频监控系统。试验测试表明:该系统能够在城区1.5公里内稳定监控救援车辆周围环境状况,并可以为远程操控车辆提供了有效监控手段,验证了系统的可行性和可靠性。
猜你喜欢
现代装饰(2022年6期)2022-12-17
现代装饰(2022年6期)2022-12-17
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
摄影之友(影像视觉)(2020年2期)2021-01-14
中国交通信息化(2019年1期)2019-03-26
电子制作(2019年23期)2019-02-23
电子制作(2018年16期)2018-09-26
中国安全生产(2018年12期)2018-07-24
凿岩机械气动工具(2017年1期)2017-05-17