基于车载雷达的安平县颗粒物的走航与固定监测
2019-11-29 08:12赵曰峰
山东师范大学学报(自然科学版) 2019年4期
高 静 赵曰峰 王 旭
( 山东师范大学物理与电子科学学院,250358,济南 )
1 引 言
大气中悬浮颗粒物或气溶胶,特别是细粒子,会导致能见度降低、灰霾天气频发等大气污染[1,2],并且会对人体健康造成损害,使得颗粒物的监测、整治及预防成为热点.针对颗粒物的测量方式,地面观测可以得到质量、浓度等一些物理化学性质参数,但地面测量仪器不能获得颗粒物的空间分布信息.虽然利用探空气球、机载探测等方式可以掌握颗粒物的垂直分布情况,但运行成本较高,难以实现数据的连续性.大气颗粒物激光雷达主要用于大气传输过程监测和大区域大尺度的测量,辅助车载颗粒物监测仪实现排放源的快速移动监测[3-7],对影响大气状况的主要排放源进行实时监测,为污染来源分析和相关决策提供有效的数据支持.
常见的监测方式主要有以下几种.
平面扫描监测:激光雷达平面扫描测量能够探测和记录所在位置平均有效监控半径为4 km范围内的污染源(本地源以及外来源)的变化过程,寻找水平颗粒物排放源.
移动走航监测:车载激光雷达移动走航监测能够快速获得监测区域内大气颗粒物垂直剖面,结合气象、地形等宏观环境条件,可以实现颗粒物污染的产生、消散及跨界输送等过程的有效分析,在区域颗粒物污染探测方面有重要的应用价值.通过走航测量结合环境条件分析城市污染成因,可以直观地反映城市各个区域的污染情况.在固定、走航结合的监测模式下,可以获取“点面域、地空天”的一体化数据.
固定垂直监测:固定站点的长时间垂直测量可以分析空间污染物传输情况.结合风场激光雷达可以计算污染物传送比,分析污染物本地/外来的比例.通过垂直连续长周期测量可以获取垂直的颗粒物时空演变数据,了解本地PBL层分布变化情况,是本地的污染物模式和预警预报的重要模式数据.
2 激光雷达测量原理
米散射激光雷达方程为
(1)
式中,PL(z,λL)为激光雷达接收的高度z处的大气后向散射回波功率;λL为激光波长;KL为激光雷达系统常数;β(z,λL)为高度z处的大气在波长λL上的后向散射系数,β(z,λL)=βm(z,λL)+βa(z,λL),βm(z,λL)和βa(z,λL)分别为空气分子和大气气溶胶的后向散射系数;α(z,λL)为高度z处的大气在波长λL上的消光系数,α(z,λL)=αm(z,λL)+αa(z,λL),αm(z,λL)和αa(z,λL)分别为空气分子和大气气溶胶的消光系数;z0是激光雷达所在的高度.
求解米散射激光雷达方程主要有两种常用的方法:Klett方法和Fernald方法[8-10].下面对这两种方法展开作具体介绍.
Klett方法:Klett假设大气消光系数和后向散射系数满足
(2)
式中,k为常数,变化范围为0.7~1.3,典型值取1;S1为常数.
将式(2)代入式(1),消去大气后向散射系数,化简后得到一个Bornoulli方程.求解这个方程,得到大气消光系数,
(3)
式中,S(z,λL)=ln[PL(z,λL)z2];zc为选取边界值α(zc,λL)的高度.Klett方法适用于大气气溶胶浓度较高的区域,如大气边界层、云层和光学厚度较大的气溶胶层.
Fernald方法:Fernald假设有如下关系:
αa(z,λL)=S1βa(z,λL),
(4)
αm(z,λL)=S1βm(z,λL),
(5)
S1是大气气溶胶的消光后向散射比,又称为激光雷达比,S2是空气分子的消光后向散射比.由瑞利散射理论可以得出S2=(8π/3)sr.激光雷达比可进一步展开为
(6)
式中,σext(λL,m,r)和σback(λL,m,r)分别是半径r、折射率m的大气气溶胶粒子在波长λL的微分消光截面和微分后向散射截面;n(r,z)是大气气溶胶粒子的尺度谱分布.
将式(4)和(5)式代入式(1)消去大气气溶胶的消光系数,化简后得到一个Bernoulli方程.求解这个方程,就得到大气气溶胶的后向散射系数,
βa(z,λL)=-βm(z,λL)
(7)
利用反演得到的大气气溶胶后向散射系数和假设的激光雷达比便能根据公式(7)计算出大气气溶胶的消光系数.
3 实地检测
目的是利用激光雷达走航和固定监测,分析城市上空污染物走势,结合气流气象条件,分析城市污染成因.
3.1城市空气质量分析图1为环保部提供的安平县 9 月 15 日至 9 月 21日城市空气质量分析.可以发现安平县这几日的空气质量良好,但是9月16日的污染指数明显高于另外几天的污染指数,而且呈现出先升后降的趋势.
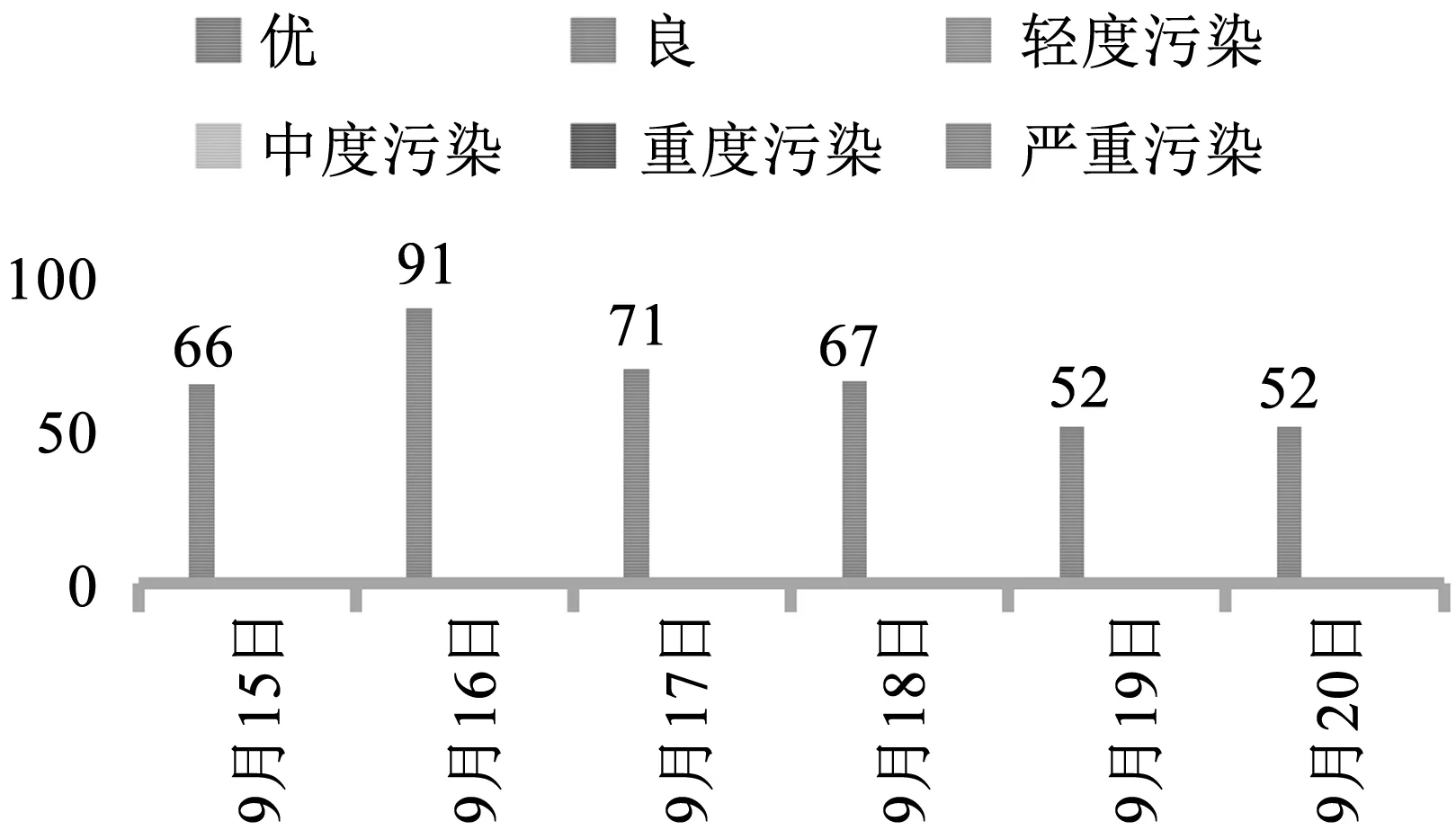
图1 安平县空气质量日报
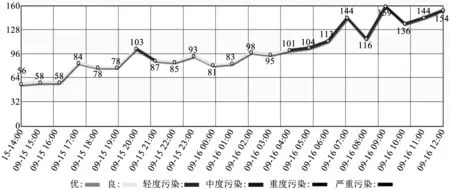
图2 安平县过去24小时空气质量走势
图2为过去24小时安平县空气质量指数趋势,从图中可以看出空气质量指数在9月16日凌晨2时开始上升,在9时达到最大,并且9时以后空气质量指数在上下浮动,估计在14时左右时候再次出现峰值.本文旨在根据雷达探测数据,结合子站 PM10、风速等分析这一现象的成因.
3.2系统参数激光器采用泵浦固体激光器,工作波长选用532 nm,单脉冲输出能量≥1 mJ,脉冲频率为2 kHz.望远镜口径为180 mm.颗粒物监测仪的测量范围为0~100 mg/m3,精度为小于±10%.风速风向仪有0~70 m/s和0~360°两种测量范围模式,准确度为±3°.
4 城市整体污染分析
4.1总体情况概括通过15日至20日安平县固定探测颗粒物浓度演化图对比可知,16日颗粒物浓度最大,并且主要污染源是外来输入.19日颗粒物浓度最低,空气质量最好.15日22时左右外来污染物开始传输,到16日14时左右外来污染物与本地污染物叠加达到峰值.16日14时以后颗粒物浓度慢慢下降.17日21时左右又有外来污染,到18日6时左右与本地污染源叠加达到峰值.18日6时以后颗粒物浓度下降,并且在19日颗粒物浓度下降到最低.19日与20日颗粒物浓度相对较低,空气质量相对较好.而在20日10时左右有一个短暂颗粒物浓度增大,造成短暂偏大的主要原因为扬尘.
由图4可知,19日安平县大气颗粒物浓度最低,而16日走航的反演结果最为严重,颗粒物浓度最大.总体反演结果显示,从15日开始,主要污染为近地面的一些污染,且空中云层较厚,可知为阴天,根据探测结果,16日的反演显示大气颗粒物污染开始加重,到达18日开始大气颗粒物污染明显减弱,19日至20日反演结果基本没有变化.对比环保部提供的安平县 9月15日至9月21日城市空气质量分析报告,反演结果与环保部提供空气质量预报一致.

图3 15-20日固定监测数据分析对比
4.2具体污染数据分析通过这几天的走航可以看出鹤煌大道的颗粒物浓度相比其他路段偏高,鹤煌大道到汉王公园路段,颗粒物浓度明显减少.由此可以推断在鹤煌大道上污染源主要是机动车尾气的排放以及机动车行驶时带动的扬尘.在裕华路和红旗大街的颗粒物浓度也偏高,由于在裕华大道和红旗大街正在进行燃气管道的铺设,燃气管道的铺设引起扬尘,造成此路段颗粒物浓度偏高.最后环保局的颗粒浓度也偏大,在其周围有建筑工地,引起扬尘的扩散,同时因为环保局周围高楼环绕,扩散的污染物不能及时飘散.

图4 15-20日安平县走航区域颗粒物浓度时空演化图
图5为2017年9月15日15∶30时至16日12∶30时安平县环固定探测颗粒物浓度时空演化图,从图中可以看出在17时以后污染逐步加重,且主要污染源来自于本地,而在22时左右外界传输污染加重,污染加重一直持续到16日探测的时间终点12时,此时污染还在加重,其主要污染主要来自外界传输.
图6为2017年9月15日安平县17时走航探测区域粒子后向轨迹追踪图.从图中可以看出走航区域的风向为东南风,在100 m处主要污染物来源是地面的扩散,而在1 000 m处污染物主要来源是高空扩散,而高空扩散污染物主要是来自外界污染的传输.

图5 15日15∶30至16日12∶30时安平县固定探测颗粒物浓度时空演化图

图6 16日17时安平县走航区域粒子后向轨迹追踪图
2017年9月15日16∶18时对围绕安平县汉王路、红旗大街、北新大道及省道301(鹤煌大道)进行了走航探测,并对走航探测的结果进行分析.
图8中右侧颜色深浅代表污染程度,红色为污染程度比较重,其次黄色,蓝色为污染比较轻或无污染.走航检测探测的最大高度为11.25 km,同时也是探测该高度内污染物的分布情况,从图7的走航颗粒物浓度演化图可以看出污染物主要在1 000 m高度的范围内,走探测高度4.5 km左右主要是云层.
图9走航的区域主要为汉王路、红旗大街、北新大道及省道301(鹤煌大道)附近走航.其中走航路线为汉王路至红旗大街再到北新大道最后为省道301(鹤煌大道),可以从颗粒物浓度时空演化图看出在走航汉王路、红旗大道、北新大道时颗粒物浓度相对较小,而靠近省道301(鹤煌大道)颗粒物浓度明显变大,从颗粒物浓度时空演化图看出颗粒物浓度明显增加.而在省道301(鹤煌大道)上面有大量的机动车车辆,并且大型卡车比较多,机动车车尾气排放比较严重.同时由图6粒子后向轨迹追踪图可知在100 m处主要是低空扩散,而低空扩散主要是机动车尾气的排放.同时汉王路,红旗大街,北新大道路上机动车较少,颗粒物浓度相对较低.可以推测在省道301附近污染源主要是机动车尾气的排放.
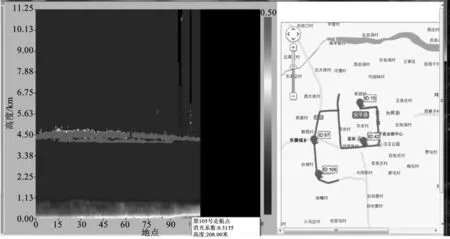
图7 15日16:18 时安平县走航区域颗粒物浓度时空演化图

图8 走航数据三维展示
图10走航的区域主要为汉王路、红旗大街、裕华路附近走航.其中走航路线为汉王路至红旗大街最后经裕华路至安平县环保局,可以从颗粒物浓度时空演化图看出在汉王路、红旗大道颗粒物浓度相对较小.而靠近裕华路至环保局时颗粒物浓度明显变大,从颗粒物浓度时空演化图看出颗粒物浓度明显增加.而在裕华路上有燃气管道铺设,铺设期间扬尘比较严重,同时在靠近环保局附近建筑工地比较多,建筑的扬尘对空气颗粒物浓度有一定的影响.
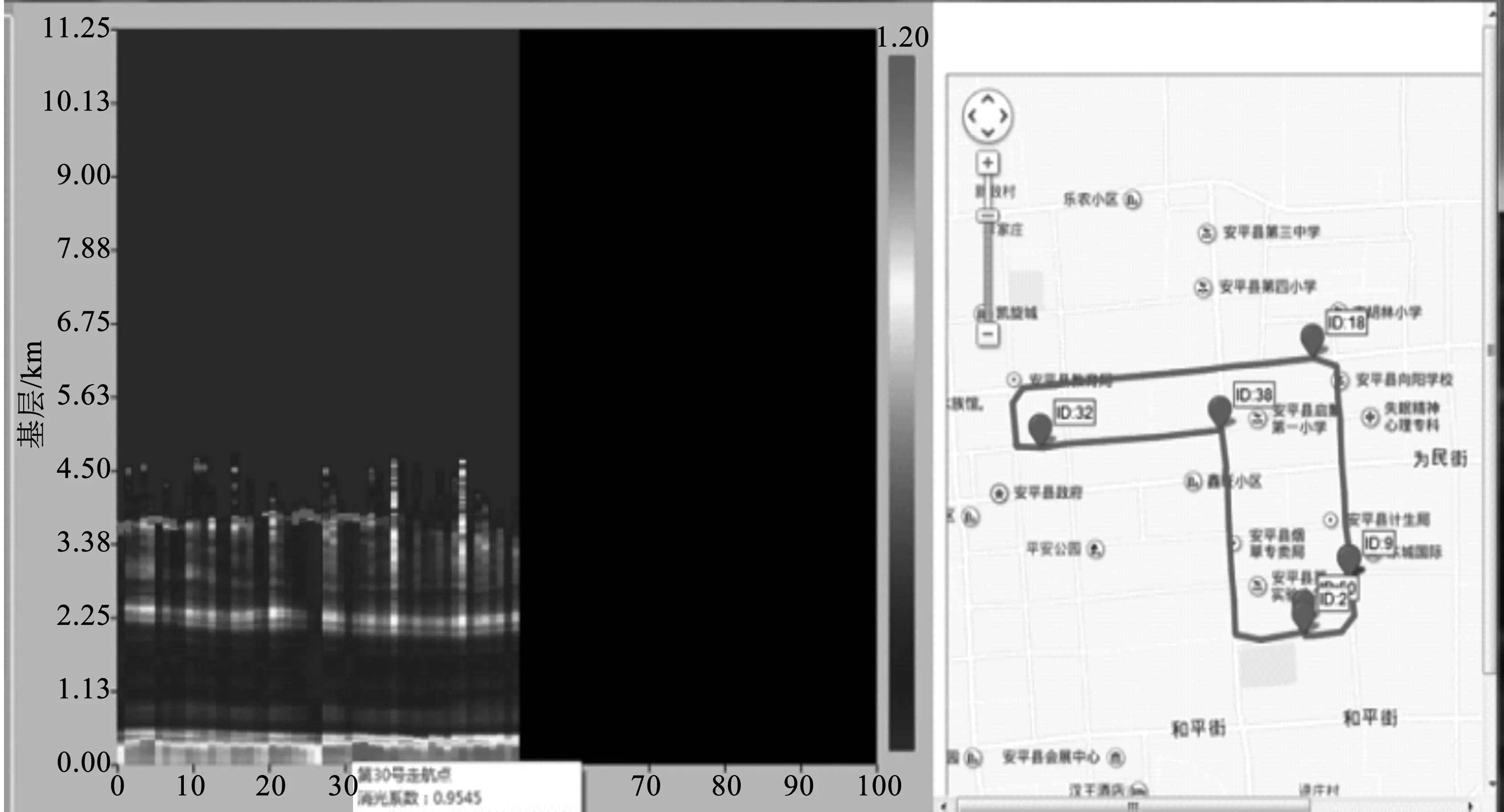
图9 16日10时走航区域颗粒物浓度时空演化图

图10 走航数据三维展示
5 天气预警预报
根据后向轨迹、空气质量先进监测网的高分辨率空气质量监测数据、环保部空气质量监测数据、中国气象局CIMISS/CMACAST/CMANET等业务系统传输的观测数据和模式产品对天气数据进行收集,对收集到的数据将直接存储到数据库子系统的本地数据源内,然后经过进一步的软件数据处理,根据数据库进行数据预测,对天气进行预警预报.图11为对安平县的PM2.5、PM10以及臭氧在未来四天的变化趋势预测[11].

图11 未来4天颗粒物、臭氧浓度变化趋势图
6 结 语
本文利用车载颗粒物激光雷达移动观测系统,对安平县2017年9月15日至9月20日的天气状况进行了监测,结合颗粒物时空演化图、风向及环境条件对污染因素进行了分析,并与环保部给出空气质量走势图进行了对比,验证了该系统的准确性和实用性.垂直监测可以直接反映城市垂直污染的变化,而导航监测可以直观地反映城市的区域性污染,同时导航检测增加了固定检测的可操作性、机动性,所以导航与固定相结合的检测方式有利于更好地实现对污染源的快速运动监测和实时监测,为污染源分析和相关决策提供有效的数据支持.
猜你喜欢
北京测绘(2022年5期)2022-11-22
成都信息工程大学学报(2022年3期)2022-07-21
汽车观察(2021年8期)2021-09-01
辐射防护通讯(2019年3期)2019-04-26
中国交通信息化(2019年1期)2019-03-26
四川环境(2019年6期)2019-03-04
电子制作(2018年16期)2018-09-26
档案天地(2017年8期)2017-08-24
散文百家(2015年7期)2015-07-16
散文百家(2015年7期)2015-07-16