
双轴旋转惯导系统误差自标定技术研究
2019-12-11 03:48张金刚姜述明
导航定位与授时 2019年6期
张金刚,姜述明
(1.海军装备部驻北京地区某军事代表室,北京 100074;2.北京自动化控制设备研究所,北京 100074)
0 引言
惯导系统(Inertial Navigation System,INS)作为武器装备的重要组成部分,其主要作用是提供满足精度指标要求的惯性导航参数,导航参数精度的高低将直接决定武器装备性能的好坏。
而影响导航精度的主要因素是惯导系统的长期稳定性误差,特别是惯导系统随武器装备定型后装备部队,一般服役期在十年甚至几十年以上。在此期间,系统惯性器件误差会随着服役时间的加长而增大。为了消除这种长期稳定性误差,惯导系统一般会提出定期标定的保障需求。
目前定期标定主要有两种形式,一种是将惯导系统从装备上拆卸下来,安装到专门配套的双轴或三轴转台上进行重新标定,需要的保障条件是固定地基、高精度转台、专门配套的测试设备与数据处理软件。另一种形式是采用武器装备整体转动标定台进行转位实现对惯导系统的不拆卸标定,该方式需要的保障条件是体积和质量较大的转动标定台、较大的安放空间及专门配套的测试设备与数据处理软件;且受旋转路径限制,该方法一般只能对加速度计零位及陀螺漂移误差进行标定,而无法对惯性器件的标度因数误差、安装误差角等参数进行准确分离和标定。
上述两种标定方式均对保障设备、场地、人员操作、标定时间等提出了较高的要求,特别是在武器装备大批量装备部队后,惯导系统的定期标定成为了装备维护的主要内容,给部队后勤保障工作造成了较大的负担。
针对上述问题,对基于双轴旋转式惯导系统的标定技术进行了研究,双轴旋转框架结构为系统的标定提供了便利的条件。本文主要通过对自标定转位方案和标定数据处理方案进行研究,以实现武器装备在库房贮存状态下或装载体停泊状态下,不拆卸、不转动情况下惯导系统的快速、高精度、自动化自标定。
1 双轴旋转式惯导系统基本原理
双轴旋转式惯导系统主要由惯性测量单元(Inertial Measurement Unit,IMU)与双轴转位机构组成,其整体布局如图1所示,系统中采用外框架俯仰旋转和内框架航向旋转的布局形式[1-2]。
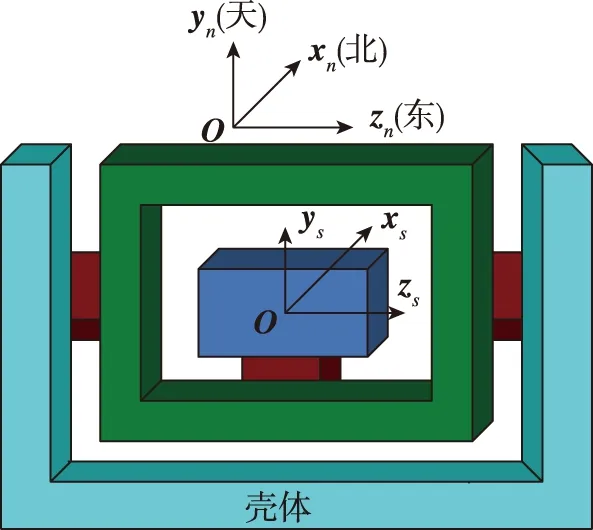
图1 双轴旋转惯导系统示意图Fig.1 Two-axis rotation INS
双轴旋转式惯导系统工作的基本原理如图2所示,通过捷联安装于内环框架上的陀螺仪和加速度计敏感加速度和角速度信息,建立数学平台,并实时解算出位置和速度等导航参数;利用双轴旋转机构,通过时间平均技术,使惯性器件误差得以抑制,从而提高惯性导航精度;通过测角机构得到内、外框架轴的旋转角度,最后解调得到载体的姿态。
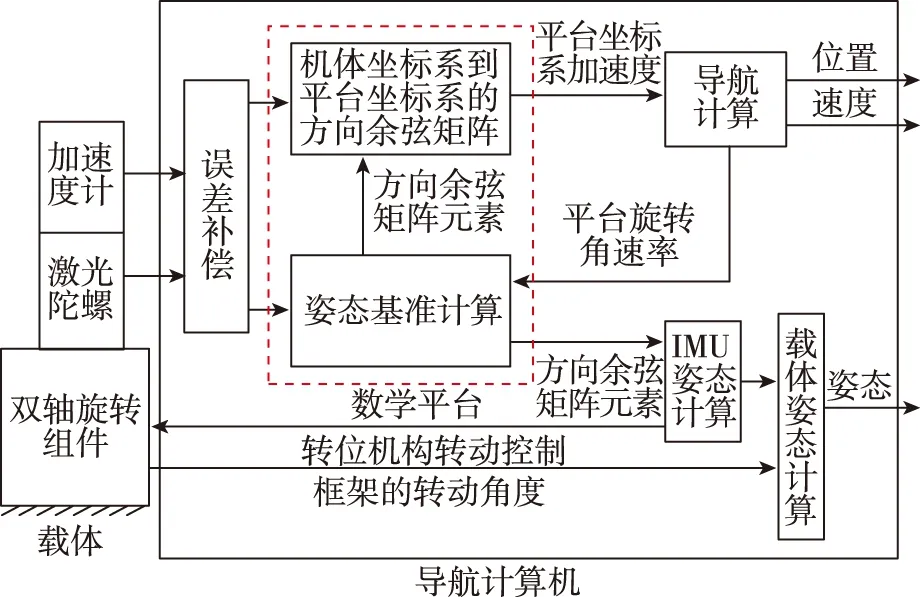
图2 双轴旋转惯导系统工作原理图Fig.2 Two-axis rotation INS working principle
2 自标定方案设计
2.1 自标定参数选取
由于惯导系统具备双轴转位机构,且采用外框俯仰旋转和内框航向旋转的转位形式, IMU的3个轴向的加速计均可以实现指天、指地,3个轴向的陀螺均可以实现正负360°的旋转。因此,其具备对IMU绝大部分误差参数进行精确标定的能力,在此选取如表1所示的误差量作为自标定的误差状态量[3]。
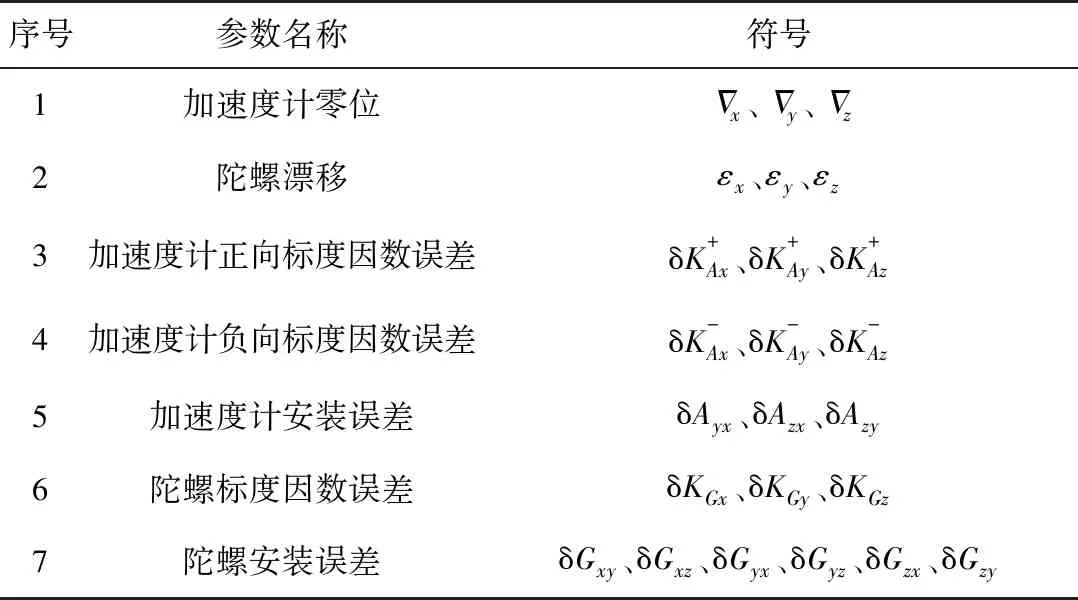
表1 自标定参数选取表
2.2 自标定模型建立
2.2.1 状态方程
利用导航滤波算法对上述自标定参数进行估计,自标定模型中的系统状态方程如下所示

(1)
式中,状态量[4-8]
δKGz,δGxy,δGxz,δGyx,δGyz,δGzx,δGzy]
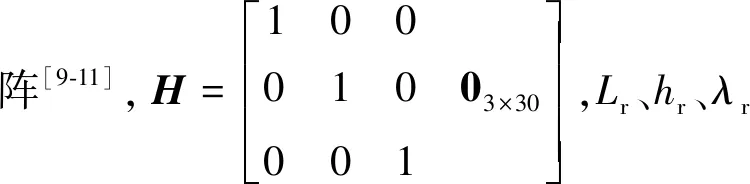
状态转移矩阵[9-11]

2.2.2 观测方程
通过外部装订标定处准确的位置信息即可对式(1)中的各项误差量进行准确估计,其中观测方程如下所示
(2)
2.3 自标定转位方案设计
惯导系统在出厂使用前均需要进行事先标定,标定通常是在精密双轴转台上进行,一般采用19位置标定转位方案[12-13]。该方法可以分离对惯导系统精度影响较大的绝大部分误差源,并通过最小二乘解析方法对标定数据进行处理得到标定参数;但是该标定方法对保障条件有一定的要求:
1)需要将精密转台安装在特殊建造的隔离地基上,隔离地基周边干扰;
2)惯导安装于转台上,转台内外环轴均在零位时,惯导3个轴向指向与北天东夹角不能大于1°;
3)转台转位精度应优于5″。
借鉴上述转位方案可实现绝大部分误差参数标定的优点,将其应用于双轴旋转惯导系统的自标定中,其转位顺序如表2所示;采用2.4节的数据处理方案,无需IMU在每个位置处均要指向正南、正北、正东、正西、正上、正下,仅需保证相对转位路径正确即可,自标定具有以下优势:
1)无需安装到隔离地基上,对外部干扰不敏感[14-15];
2)摆放位置没有特殊要求,对初始指向无要求;
3)对转位机构的转位精度要求较低,优于1°即可满足要求。
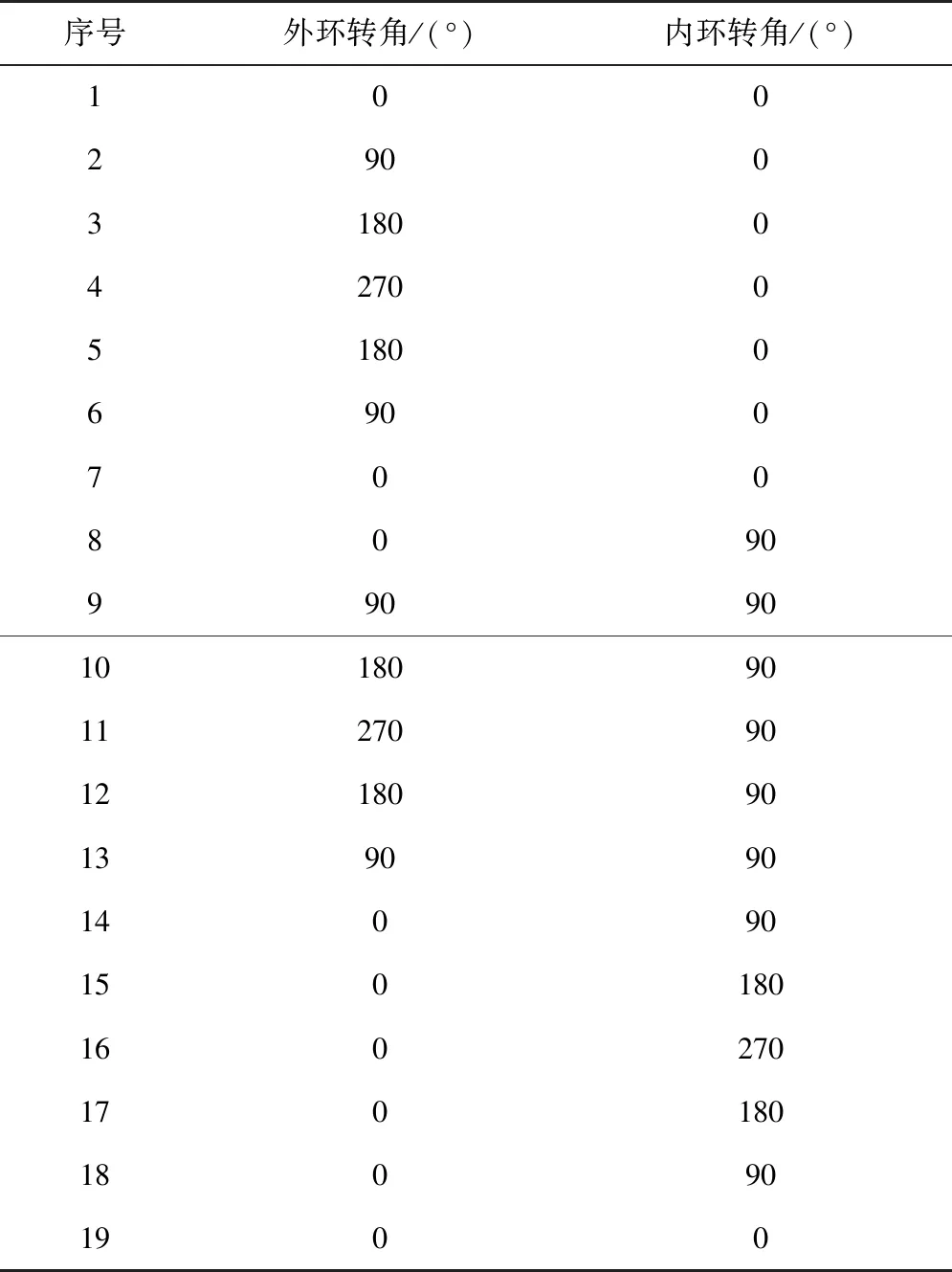
表2 自标定转路径表
综上,武器装备在库房贮存状态或装载体停泊状态下均可以实现对惯导系统的自标定,大大简化了外部保障条件。
2.4 自标定数据处理方案设计
在惯导系统随武器装备大批量交付部队后,为了缩短每套装备的测试和维护时间,减轻部队后勤保障工作负担,对惯导系统提出了缩短自标定时间的迫切需求。然而从标定原理上来说,缩短自标定时间会降低各误差的标定精度。
针对上述矛盾问题,设计了正反向导航和滤波技术对自标定数据进行处理,即部队在进行自标定测试时,数据采集过程的实际时间为T。通过正反向导航和滤波可以人为地将标定时间扩展为n倍T时长,这样就可以在不增加实际测试时间的情况下,得到所需长度的虚拟标定时间。该方案可在缩短自标定时间的同时,保证系统误差的标定精度,其处理流程如图3所示。

图3 正反向数据处理流程示意图Fig.3 Positive and negative data processing
正向导航和滤波[9-10,13]是组合导航算法中普遍通用的算法,这里不再赘述;反向导航和滤波原理上与正向导航和滤波相同,不同之处在于正向算法按时间增长解算,反向算法按时间倒退解算;两者在相同时刻上解算的位置、速度、姿态等导航参数应相同,即物理意义相同;在算法实现上,反向算法相对正向算法的最主要变化是导航周期Tn由正变负。
2.5 总体实施方案设计
综上所述,双轴旋转式惯导系统的自标定实施方案如图4所示,自标定总时间不超过1h;其具体步骤如下:
1)首先装备加电,地面测试设备向配套惯导系统发送自标定命令;
2)配套惯导系统按表2自标定转位顺序进行转位,每个位置停留2.5min;
3)在自标定转位的同时,实时将IMU原始测量数据中的加速度和角速度信息保存于装备配套惯导系统中的FLASH中;
4)自标定转位结束,采用2.2节所建立的滤波模型,利用正反向导航滤波的处理方法对存储于FLASH中的自标定出数据进行正负迭代处理,直至满足标定精度要求;
5)数据处理结束,向地面测试设备给出自标定结果,同时将结果写入装备惯导FLASH中,待下次系统通电时从FLASH中读取并补偿;
6)自标定结束。
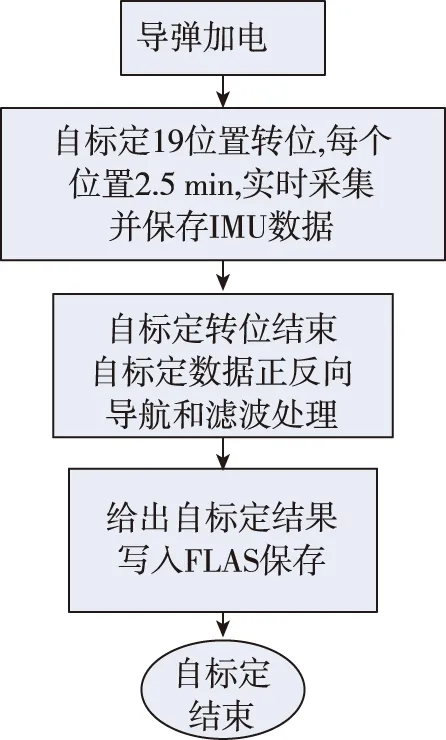
图4 自标定实施方案示意图Fig.4 Implementation solution of self-calibration
3 自标定方案验证
3.1 数学仿真验证
对上述自标定方案进行数学仿真验证,构造自标定轨迹数据,该轨迹数据为49min,在轨迹数据中加入各项误差源,根据实际系统进行设置,如表3所示。

表3 仿真各误差源设置表
经过正向+反向+正向3次迭代处理后,实际物理时间为49min的自标定数据,虚拟延长为3×49min=147min,如图5所示,得到了如图6~图11所示的估计曲线,各项误差估计精度详见表4。
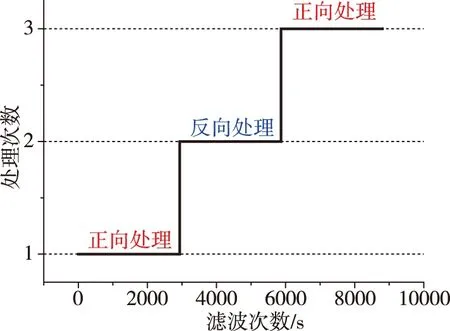
图5 自标定数据正反向处理次数Fig.5 Times of positive and negative data processing
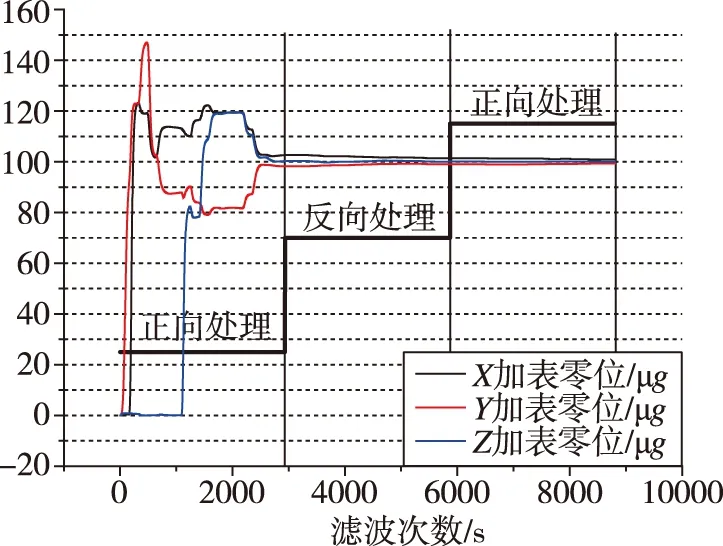
图6 自标定数据处理结果-加速度计零位估计曲线Fig.6 Accelerometer bias error estimation of data processing
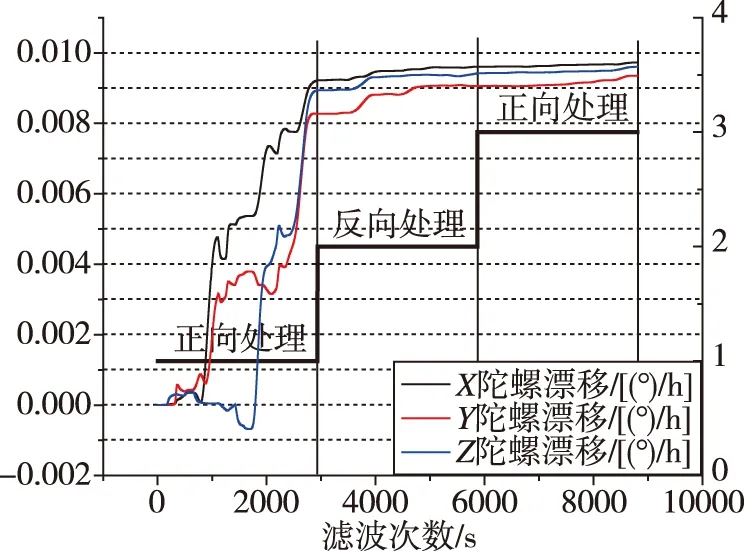
图7 自标定数据处理结果-陀螺漂移误差估计曲线Fig.7 Gyroscope drift error estimation of data processing
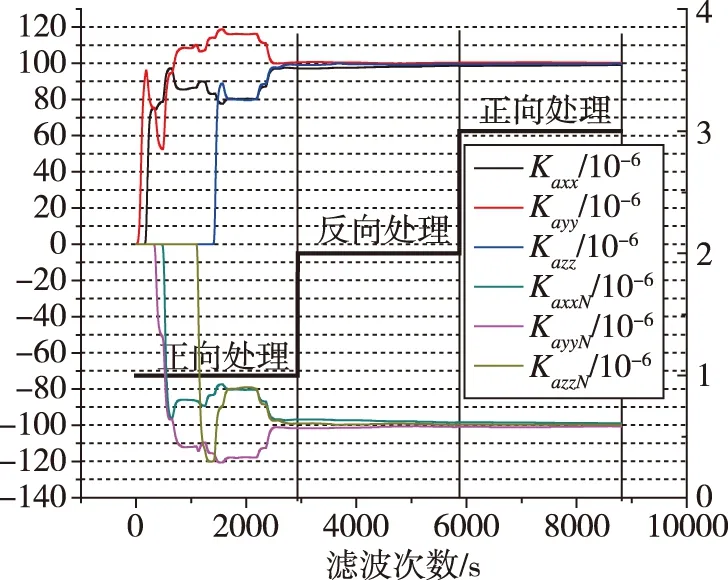
图8 自标定数据正反向处理-加速度计正反标度因数误差估计曲线Fig.8 Accelerometer positive and negative scale factor estimation of data processing
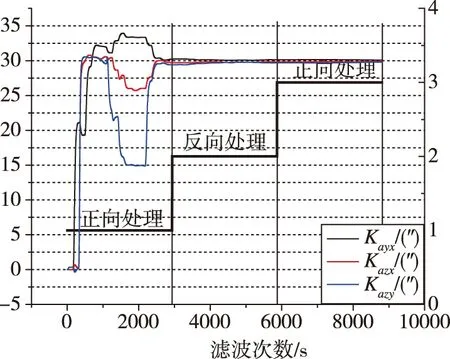
图9 自标定数据正反向处理-加速度计安装误差估计曲线Fig.9 Accelerometer installation angular error estimation of data processing

图10 自标定数据正反向处理-陀螺标度因数误差估计曲线Fig.10 Gyroscope scale factor estimation of data processing

图11 自标定数据正反向处理-陀螺安装误差估计曲线Fig.11 Gyroscope installation angular error estimation of data processing

表4 各项误差源估计精度
3.2 试验验证
经数学仿真验证后,在实际系统中进行试验验证。以实验室高精度转台对IMU各项误差的标定结果作为基准值,将自标定结果与其进行比较得到自标定误差,反复进行该比较试验得到自标定结果的误差如表5所示。试验结果表明,自标定精度与试验室高精度转台标定精度相当。
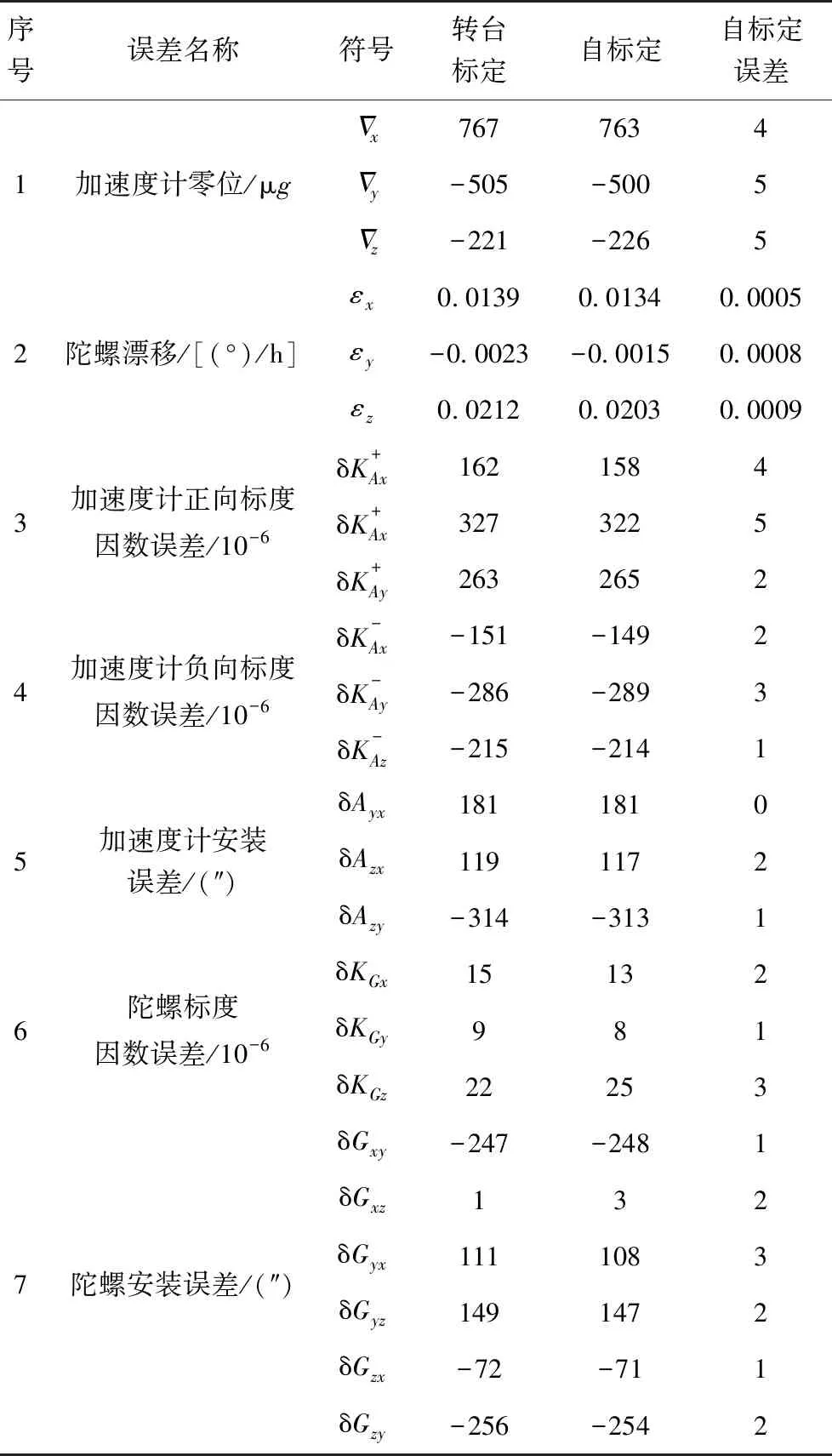
表5 自标定试验误差表
4 结论
本文基于双轴旋转式惯导系统,对自标定技术进行了针对性研究,设计了一种自标定转位及数据处理方案,该方案相比于以往惯导系统标定方案具有以下优点:
1)无需将惯导系统从武器装备上拆卸下来,保证了装备结构的稳定性;
2)无需拆卸和转动,省去了转台和转动标定台等复杂昂贵的保障设备;
3)缩短了自标定时间;
4)一键式自标定命令可简化人员操作,实现标定的全自动化;
5)可实现对惯导系统绝大部分误差的高精度自标定。
综上,该自标定方案可大大简化标定的保障条件,显著减轻部队后勤保障工作负担,具有重要的工程应用价值。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
心理学报(2022年4期)2022-04-12
导航定位与授时(2022年1期)2022-02-18
能源工程(2021年6期)2022-01-06
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
建材发展导向(2021年12期)2021-07-22
数字海洋与水下攻防(2020年5期)2021-01-04
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年4期)2019-06-01
