
双侧双级双圆弧螺旋锥齿轮章动减速器动力学分析
2019-12-21 01:59吴亚强姚立纲蔡永武谢志宇
福州大学学报(自然科学版) 2019年6期
吴亚强,姚立纲,张 俊,蔡永武,谢志宇
(福州大学机械工程及自动化学院,福建 福州 350108)
0 引言
章动减速器是基于天体行星运动原理而提出的一种新型传动形式,具有结构紧凑、传动比大、传动效率高等特点,可望广泛应用于机床、仪表、石化、航空等各类传动装置中.章动减速器的研究日益引起国内外学者的重视.Fanghella[1-2]通过建立章动锥齿轮行星齿轮系的动力学模型,得到了消除内部惯性力的平衡条件,并通过仿真试验进行验证.Saribay[3]分析了锥齿轮章动传动系统齿面受载性能和传动性能.姚立纲[4]提出将双圆弧齿形作为章动传动螺旋锥齿轮的基本齿形,建立了双圆弧螺旋锥齿轮齿面数学模型,完成了双圆弧螺旋锥齿轮章动传动三维虚拟样机的运动学、动力学实时仿真.王广欣[5]采用ADAMS对章动面齿轮传动模型进行动态啮合力仿真,分析章动面齿轮副动态啮合力的变化规律.李璐瑶[6]研究了章动传动冠状齿轮的齿形啮合原理,完成了减速器的运动仿真和动力学仿真.谢志宇[7]借助ADAMS建立双侧双级双圆弧螺旋锥齿轮传动章动减速器的多体动力学模型,并对章动减速器进行了动力学特性仿真.
以上文献取得了许多有价值的研究成果,但研究对象多为借助软件对章动齿轮进行动力学仿真.由于双圆弧螺旋锥齿轮结构的复杂性,通过建立双圆弧螺旋锥齿轮章动传动系统非线性微分方程求解其振动响应的研究相对较少.通过对双圆弧螺旋锥齿轮章动减速器的动力学分析,可对章动传动系统动态特性、振动稳定性进行预估、分析,具有现实指导意义.有鉴于此,本研究以双侧双级双圆弧螺旋锥齿轮章动减速器为例,在计入时变啮合刚度、啮合阻尼、齿侧间隙、传递误差等因素的情况下,建立章动传动系统弯-扭耦合非线性动力学模型,采用Runge-Kutta法进行数值计算,并研究了激励频率和支承刚度对其动态特性的影响,为后续章动减速器结构改进、动态优化设计提供参考依据.
1 动力学建模

图1 双侧双级章动减速器机构简图传动系统Fig.1 Schematic diagram of two-stage bilateral meshing nutation drive
双侧双级章动减速器机构简图如图1所示,三维模型如图2所示.两级齿轮副在径向方向上为“一上一下”式啮合,即第1级齿轮副(内锥齿轮1和外锥齿轮2)在一侧啮合,第2级齿轮副(内锥齿轮3和外锥齿轮4)在相反的另一侧啮合.内锥齿轮1、3固连在一起,做章动运动,称为章动齿轮.外锥齿轮2与机架固连,输入轴的水平轴线与章动齿轮所在倾斜轴线的夹角为章动角ε.齿轮副主要参数如表1所示.

表1 双侧双级章动减速器齿轮参数Tab.1 Gear parameters of two-stage bilateral meshing nutation drive
1.1 弯-扭耦合模型
为方便双侧双级章动减速器传动系统动力学建模,不失一般性,作如下假设:1)不考虑齿轮啮合时的齿面摩擦;2)系统阻尼视为一般粘性阻尼;3)由于内锥齿轮1和内锥齿轮3固连在一起,视其为一体,即内锥齿轮1和内锥齿轮3具有相同的自由度,两齿轮的振动位移相同,两齿轮之间不产生相对扭转.基于上述假设,将各齿轮视为集中质量和集中惯量,输入轴视为刚体,轴承的弹性支承通过弹簧和阻尼器来模拟.采用集中参数法建立章动减速器传动系统的弯-扭耦合分析模型,如图2所示.
在图2中,内锥齿轮1和内锥齿轮3的端面重合且锥点重合于一点O,以此点为原点建立两个坐标系:空间啮合坐标系O-xyz和随章动齿轮转动的动坐标系O-x0y0z0,其中:y轴与y0轴重合,z轴与z0轴的夹角为章动角ε;T2和T4分别为输入力矩和负载力矩;xi、yi、zi(i=13,2,4)分别为各齿轮在x、y、z方向的平移振动位移,θi(i=13,2,4)为各齿轮的扭转位移;kpq、cpq(p=13,2,4;q=x,y,z)分别为各齿轮在3个坐标方向受到的支承刚度和支承阻尼;km j、cm j、en j(t)(j=1,2)为各齿轮副的时变啮合刚度、啮合阻尼、法向静态传递误差;fm j(j=1,2)为由齿侧间隙构成的非线性力-位移函数.

图2 双侧双级章动减速器传动系统动力学模型Fig.2 Dynamic model of two-stage bilateral meshing nutation drive
1.2 系统的激励分析
齿轮系统的动态激励有内部激励和外部激励两类.外部激励主要指来自原动机转矩或负载的阻力矩作用产生的激励,包括转速波动、转矩波动、几何偏心等激励;内部激励是指齿轮动态啮合过程产生的激励,主要包括刚度激励和误差激励.
对于双圆弧齿形的齿轮,其啮合刚度定义为所有同时啮合点单点啮合刚度的总和,因而它与啮合点数及啮合位置有关.双圆弧螺旋锥齿轮单点啮合刚度[8]的表达式为

(1)
式中:Fn为作用于单个啮合点齿面的法向接触力;un为单个啮合点处的综合弹性变形.轮齿的综合弹性变形包括啮合点的接触弹性变形uH、轮齿弯曲产生的轮齿接触位置的位移ub以及轴承、轴和支撑结构的变形对接触点变形位置的影响uf.由于uf的量级较小,因此式(1)简化为:

(2)
由于双圆弧螺旋锥齿轮同时有多个啮合点接触,各啮合点之间是并联的耦合关系,故齿轮综合啮合刚度的表达式为:

(3)
式中:r为同时接触的啮合点数.
双圆弧螺旋锥齿轮的齿面非常复杂,沿齿长方向上的齿厚是变化的,其综合啮合刚度目前没有解析解.利用有限元软件ABAQUS建立双侧双级章动减速器传动系统有限元模型,如图3所示,并对其进行加载接触分析,得到啮合点处的法向接触力和弹性变形量,从而计算出齿轮综合啮合刚度.为便于求解章动传动系统非线性动力学模型并尽量模拟真实值,采用8阶Fourier级数对综合啮合刚度曲线进行拟合,其结果如图4所示.

图3 双圆弧螺旋锥齿轮啮合刚度Fig.3 Meshing stiffness of double circular arc spiral bevel gears
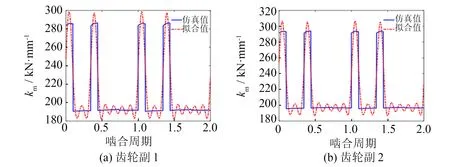
图4 双侧双级章动减速器传动系统有限元模型Fig.4 Finite element model of two-stage bilateral meshing nutation drive
时变啮合刚度km j的表达式为:

(4)
式中:kav j为齿轮副啮合刚度的平均值;an j、bn j为谐波项啮合刚度的幅值;ωm j为齿轮副的啮合频率,ωm=2πnz/60,n为各齿轮等效转速,即将行星轮系转化为定轴轮系后的转速.各次谐波参数如表2所示.另外,各级齿轮副啮合刚度的平均值分别为kav1=210 kN·mm-1,kav2=215.4 kN·mm-1.
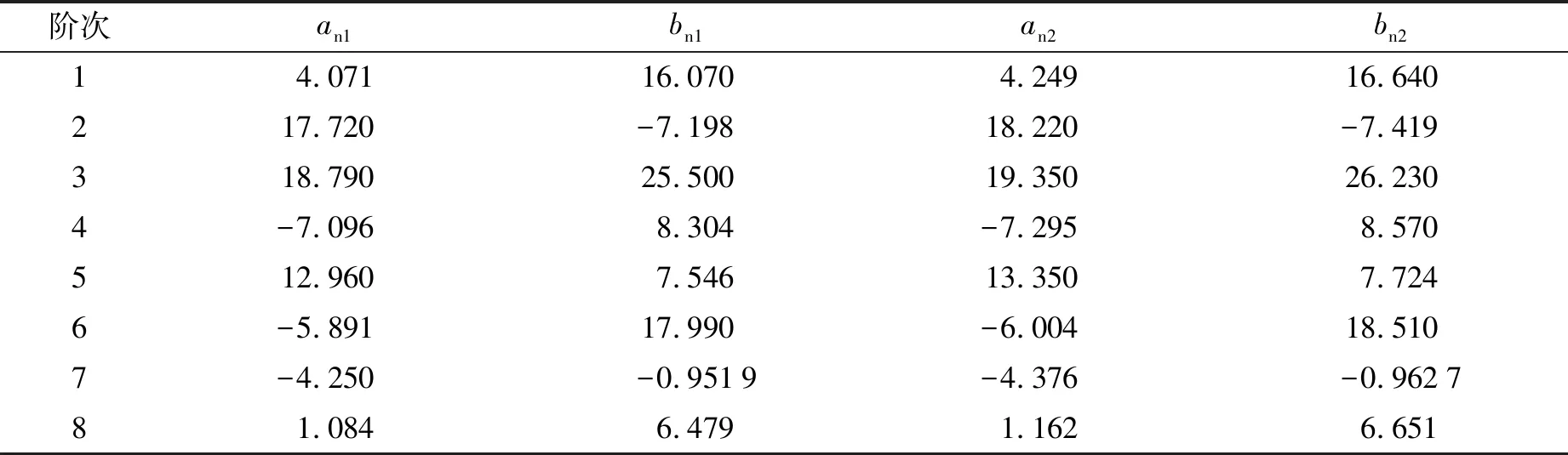
表2 啮合刚度的各次谐波参数Tab.2 Harmonic parameters of meshing stiffness (kN·mm-1)
齿轮啮合的静态传递误差是指实际啮合位置与理论啮合位置在啮合作用线上的差值.各级齿轮副法向静态传递误差可表示为:en j(t)=er jsin(ωm jt+φj).式中:er j为各级齿轮副法向静态传递误差幅值.不失一般性,假设减速器为7级精度,参考少齿差行星减速器静态传递误差[9],取er j=25 μm;φj为初相位,取φj=0.
1.3 运动微分方程推导
齿轮副在啮合时的法向动载荷及其沿坐标方向的分力[10]可表示为

Fky=Fn jcosβcosαn;Fkz=Fn j(sinδksinαn-cosδksinβcosαn)
(5)
式中:λn j(j=1,2)为锥齿轮啮合过程中因振动和误差导致啮合轮齿间产生的动态相对位移;δk(k=1,2,3,4)为各锥齿轮的节锥角;β为螺旋角;αn为法面压力角.间隙非线性函数表达式为

(6)

在啮合力作用下,外锥齿轮2齿面的法向位移xn2可表示为:

(7)
式中:rm2表示外锥齿轮2啮合点处半径,下文中rm1、rm3、rm4含义类似.在实际分析中,取啮合点半径为齿宽中点处的回转半径[12].
考虑到章动角的影响,章动齿轮1齿面的法向位移xn1可表示为:

(8)
则第一级齿轮副两齿轮啮合过程中由于振动和误差导致啮合轮齿间产生的动态相对位移λn1=xn1-xn2-en1(t);同理可得第二级齿轮副两齿轮啮合过程中由于振动和误差导致啮合轮齿间产生的动态相对位移λn2=xn3-xn4-en2(t),其中:
考虑时变啮合刚度、轮齿误差、啮合阻尼、齿侧间隙等因素,根据牛顿第二定律,得到章动传动系统的动力学微分方程如下:

(9)
式中:mi、Ji(i=13,2,4)为各齿轮的集中质量和转动惯量;L01、L03是两个内锥齿轮章动运动产生的陀螺力矩,方向沿O-y轴负方向,其通式[13]为

(10)

由于齿侧间隙的存在,使得齿轮章动传动系统的约束不完整,章动传动系统存在刚体位移与不定解.为消除刚体位移,采用λn j消除方程中的θi以实现降维,式(9)第4、8、12个方程可整合为:
式中:mdk(k=1,2,3,4)为各齿轮的等效质量,mdk=Jk/rmk2;md13表示固连齿轮1和3的等效质量,md13=J13/(rm1·rm3).
定义齿轮副的动载荷系数Kj=Fn j/Pn j(j=1,2),式中:Pn j为齿轮副法向静载荷,Pn1=T1/rm1=T2/rm2,Pn2=T3/rm3=T4/rm4;Tk(k=1,2,3,4)为各齿轮扭矩.
以齿侧间隙的一半b为位移标称尺度,引入相对位移λ1、λ2作为新的自由度,并引入一组无量纲变量其中:取第一级齿轮副的固有频率ωn为基准频率,其中:ωn=(kp1/me1)1/2,me1=m2(m1+m3)/(m1+m3+m2).构造系统的无量纲时间τ=ωnt进行归一化处理,限于篇幅量纲归一化后的微分方程组这里不再列出.
2 非线性振动特性分析
采用四阶Runge-Kutta法求解章动减速器的运动微分方程,取积分时间为500Tm(Tm=2π/Ω,Ω为无量纲激励频率,Ω=ωm1/ωn),舍弃积分初始的200个周期,取后面稳态响应作为系统的动态响应.
已知各齿轮支承刚度分别为:k13x=k13y=k13z=170 kN·mm-1,k2x=k2y=k2z=220 kN·mm-1,k4x=k4y=k4z= 290 kN·mm-1.以第二级齿轮副为例,分析参数对系统动态响应的影响.
2.1 激励频率对系统动态性能的影响
齿轮副在不同激励频率下的动态响应如图5所示.随着激励频率的变化,章动传动系统出现多种振动响应.当Ω=0.9时,系统响应呈现7周期次谐波响应,即周期为7Tm的周期运动,相图为具有一定宽度的近似椭圆曲线,庞加莱图呈现7个散点.当Ω=1.9时,相图为具有一定宽度且交叉缠绕的曲线带,庞加莱图呈现7个带状点集,系统处于从多周期运动到混沌运动的过渡阶段,表明系统在此啮合频率下为拟周期运动状态.当Ω=2.9时,相图为互相缠绕交叉但不重复的曲线,庞加莱图呈现有限区域内的点集,表明系统在此啮合频率下处于混沌运动状态.由此可知,随着激励频率的提高,章动传动系统由多周期状态经拟周期过渡到混沌状态,系统非线性特性增强.激励频率对动载荷系数的影响如图6所示.
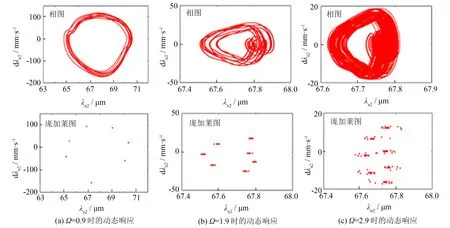
图5 不同激励频率下的动态响应Fig.5 Dynamic response under different excitation frequencies

图6 激励频率对动载荷系数的影响Fig.6 Influence of excitation frequency on dynamic load coefficient
图6(a)为动载荷系数幅值Kmax随激励频率的变化,当无量纲激励频率Ω为0.5和1.0时,动载荷系数出现峰值,系统振动最为激烈.图6(b)为不同激励频率下动载荷系数时域图,当无量纲激励频率Ω为0.3~0.5时,动载荷系数幅值随激励频率的增大有显著增加;但当Ω=0.6时,系统动载荷系数幅值反而下降.类似地,当无量纲激励频率在1.0附近时,动载荷系数有同样的现象,此处不再赘述.因此,通过调节激励频率的大小可改善系统的动态特性.
2.2 支承刚度对系统动态性能的影响
章动减速器采用表1中的转速、转矩,改变支承刚度,得到不同支承刚度下的动载荷系数,如图7所示.图7(a)为动载荷系数幅值Kmax随支撑刚度的变化.可以看出,当支承刚度倍数为0.5~3.5时,章动减速器动载荷系数幅值随支承刚度的增加而显著降低;当支承刚度倍数为3.5~7.0时,系统动载荷系数幅值随支承刚度的增加逐渐增大;当支承刚度倍数大于7时,动载荷系数幅值基本不变.图7(b)为不同支承刚度下的动载荷系数时域图.可以看出,当支承刚度倍数由1增大到3.5时,动载荷系数幅值及变化幅度均逐渐减小;当支承刚度倍数由3.5增大到5.0时,动载荷系数幅值反而增大.因此,适当增大支承刚度可以降低系统的动载荷系数,提高章动传动系统的稳定性.
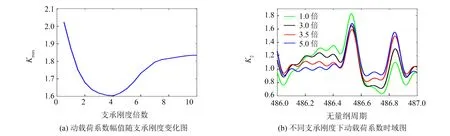
图7 支承刚度对动载荷系数的影响Fig.7 Influence of support stiffness on dynamic load factor
3 动力学模型验证
为验证动力学建模的正确性,将由集中参数法求得的动态啮合力与用ADAMS仿真得到的法向啮合力进行对比.不失一般性,假设工况均为输入转速1 050 r·min-1、输出转速10 r·min-1、输出转矩170 N·m,由微分方程(9)求得的动态啮合力如图8所示.ADAMS仿真求解得到的齿轮法向啮合力详见文[7].
由集中参数法求得的两级齿轮副稳态响应下动态啮合力均值分别为5 877、5 628 N,由ADAMS仿真求得的两级齿轮副稳态响应下啮合力均值分别为6 074、5 885 N,啮合力均值最高仅相差4.37%.集中参数法求得的啮合力波动较大,主要是由于考虑了时变啮合刚度.在ADMAS中计算碰撞力时刚度系数为定值,表明采用集中参数法更能反映动态啮合力的时变性,从而验证了本弯-扭耦合动力学模型的正确性.

图8 集中参数法求得的齿轮动态啮合力Fig.8 Gear dynamic meshing force obtained by the lumped parameter method
4 结语
1)计入时变啮合刚度、啮合阻尼、传递误差、齿侧间隙等因素,建立了双侧双级双圆弧螺旋锥齿轮章动减速器弯-扭耦合非线性动力学模型.
2)随着激励频率的增大,系统相继呈现3类稳态响应:7周期次谐响应、拟周期响应、混沌响应.当无量纲激励频率等于0.5和1.0时,动载荷系数出现峰值,系统振动最为激烈.适当调节激励频率的大小可以改善系统的动态稳定性.
3)在支承刚度的0.5~3.5倍范围内,系统动载荷系数随着支承刚度的增加而降低.适当增大支承刚度可以降低章动传动系统的动载荷系数,提高章动传动系统的稳定性.为后续章动传动系统动态优化设计提供一定的理论依据.
4)通过对比本模型所求解的动态啮合力与用ADAMS软件仿真求得的法向啮合力,发现啮合力均值最高仅相差4.37%,验证了本弯-扭耦合非线性动力学模型的正确性.
猜你喜欢
中国造纸(2022年8期)2022-11-24
一重技术(2021年5期)2022-01-18
铁道通信信号(2019年10期)2019-11-25
铁道通信信号(2019年1期)2019-03-21
军事文摘(2018年24期)2018-12-26
测控技术(2018年5期)2018-12-09
北京汽车(2018年4期)2018-09-08
电子制作(2018年10期)2018-08-04
制造技术与机床(2017年3期)2017-06-23
光学精密工程(2016年6期)2016-11-07
