智能化作物株间机械除草技术分析与研究
2019-12-22 02:30赵润茂唐灵茂姚腊梅
农机化研究 2019年6期
伍 同,曾 山,赵润茂,唐灵茂,杜 攀,姚腊梅
(华南农业大学 工程学院/ 南方农业机械与装备关键技术教育部重点实验室,广州 510642)
0 引言
杂草控制是农作物植保过程中的关键环节,也是各国科研人员的研究热点。在除草控制的研究中,杂草的控制方法主要分为化学除草、人工除草和机械除草。化学除草成本低,但除草剂残留污染环境,甚至危害人体健康[1];人工除草的方式劳动强度大,且除草效率较低,成本较高[1]。对于蔬菜类等食用有机农作物生产,只能采用机械除草和人工除草方式。随着计算机与人工智能技术的迅速发展,智能化机械除草成为一种更为可行的选择[2]。智能化作物株间除草技术,即除草机械系统具有智能性,能够识别作物或杂草并获取定位信息和密集度等情况,从而精准去除杂草[3]。
普通中耕期除草技术主要是除去行间杂草,实际上株间杂草更接近作物,但与行间除草不同,作物的存在导致除草区域不连续。株间除草对作物伤害较大,通常采用的方式是人工除草。智能化机械除草技术包括行间和株间除草技术,智能、环保且高效。目前,该除草技术难点:一是作物与杂草分类技术;二是作物定位与避苗控制技术。近些年,随着地理信息系统(GIS)、传感器和图像处理技术在精准农业领域的成功应用,机械化除草装备研发也趋于智能化,但目前很多智能化除草技术的研究仍然处于理论研究和实验室理想环境下。
对于智能化行间除草技术,很多研究成果已经转化到农业实际操作上,技术相对较为成熟;然而,对于智能化株间机械除草,还是一个全新的范畴。常规的株间除草方式有3种:①土壤直接覆盖;②切断杂草的根茎;③将草连根拔起。对于株间除草来说,任何一种方式都需要先对杂草和作物定位,然后控制机械避开作物同时除去杂草。这是株间除草技术研究的重点和难点,导致株间除草技术发展较为缓慢。因此,展开智能化株间除草技术和装备的研究十分迫切。
1 传统株间机械除草技术
传统株间除草装置指的是设计特殊机械结构进行除草作业,如指形除草机和扭杆除草机;但是,以上两种机械结构都必须与其他除草机械联合使用,作业时容易损伤作物。有研究者设计出刷状除草机械,按方向可分为垂直和水平。其中,水平刷状只对控制行间杂草起作用,垂直刷状除草机既可对行间进行作业又可适应株间除草。然而,该除草方式损伤率较高[4],且需要大量工作准备作为前提[5]。
传统株间除草机械多数都是从行间除草装置上衍生而来。Rasmussen和Kouwenhoven研究了操作时间、作业速度、弹性齿角度、杂草种类及杂草生长时期等一系列因素受耙式除草影响[6]。Mattson等研究了旋转锄的除草效果[7],Meyer等研究出一种裂根锄[13],在土壤湿度较大、较紧的情况下,也能取得较为理想的效果。但是,传统的除草机械都必须悬挂在拖拉机或者除草车上,大大增加了劳动量,降低了劳动效率。
日本研究机构和农机企业研制了多种水田除草机械,其株间除草部件类型主要有转动弹齿盘、转动伞状盘、摆动梳齿和固定除草钢丝[8]。农业部南京农业机械化研究所研制了2BYS-6型水田中耕除草机[9],该机水稻田除草行间杂草平均除净率能达到78.1%,中耕深度4.39cm,作物损伤率小于6.89%。
2 株间机械除草关键部件
瓦格宁根大学[10](1996)研发了一种株间杂草控制系统,该装置由直径300mm垂直旋转圆盘构成,圆盘上装有两个或多个除草刀,如图1所示。旋转式耙齿除草机仅能切断土壤表面的杂草,其除草效果并不理想。

图1 旋转式耙齿圆盘除草Fig.1 Rotating disc tine
哈尔姆斯塔德大学(Halmstad University)(2005)开发了一种株间杂草控制系统[11],如图2所示。除草机构利用垂直于作物行的旋转轮割除株间杂草,通过机器视觉识别作物,检测到作物时,旋转轮被气压缸驱动提升从而避免损伤作物,旋转轮避开作物后将被放下进行除草作业。
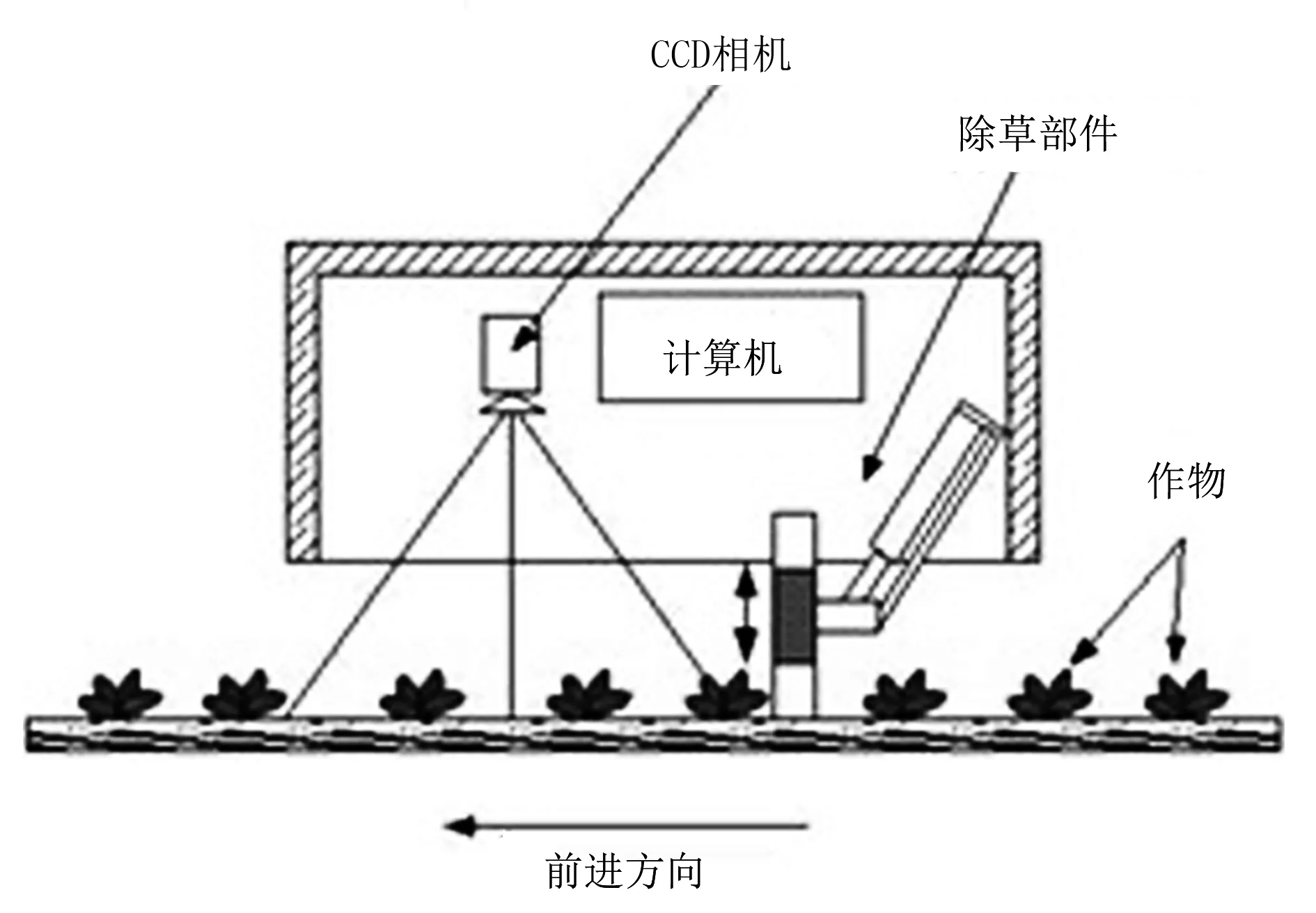
图2 旋转轮式除草系统Fig.2 Rotating wheel
比萨大学(Pisa University)研发了一种株间杂草控制系统[12],由通过链条连接的齿状圆盘除草部件和篮状除草部件组成,如图3所示。工作时,通过加装在机具后部的柔性杆实现株间除草,操作人员能通过转向轮控制横摆耙横向转动。

图3 株间杂草控制的旋转耙Fig.3 Rolling harrow with the elastic tines attached for intra-row weed control
波恩大学(Bonn University)在虚拟环境中开发了一种株间除草系统[13],利用悬置于作物上方的沿水平轴旋转的旋转锄实现除草,如图4所示。
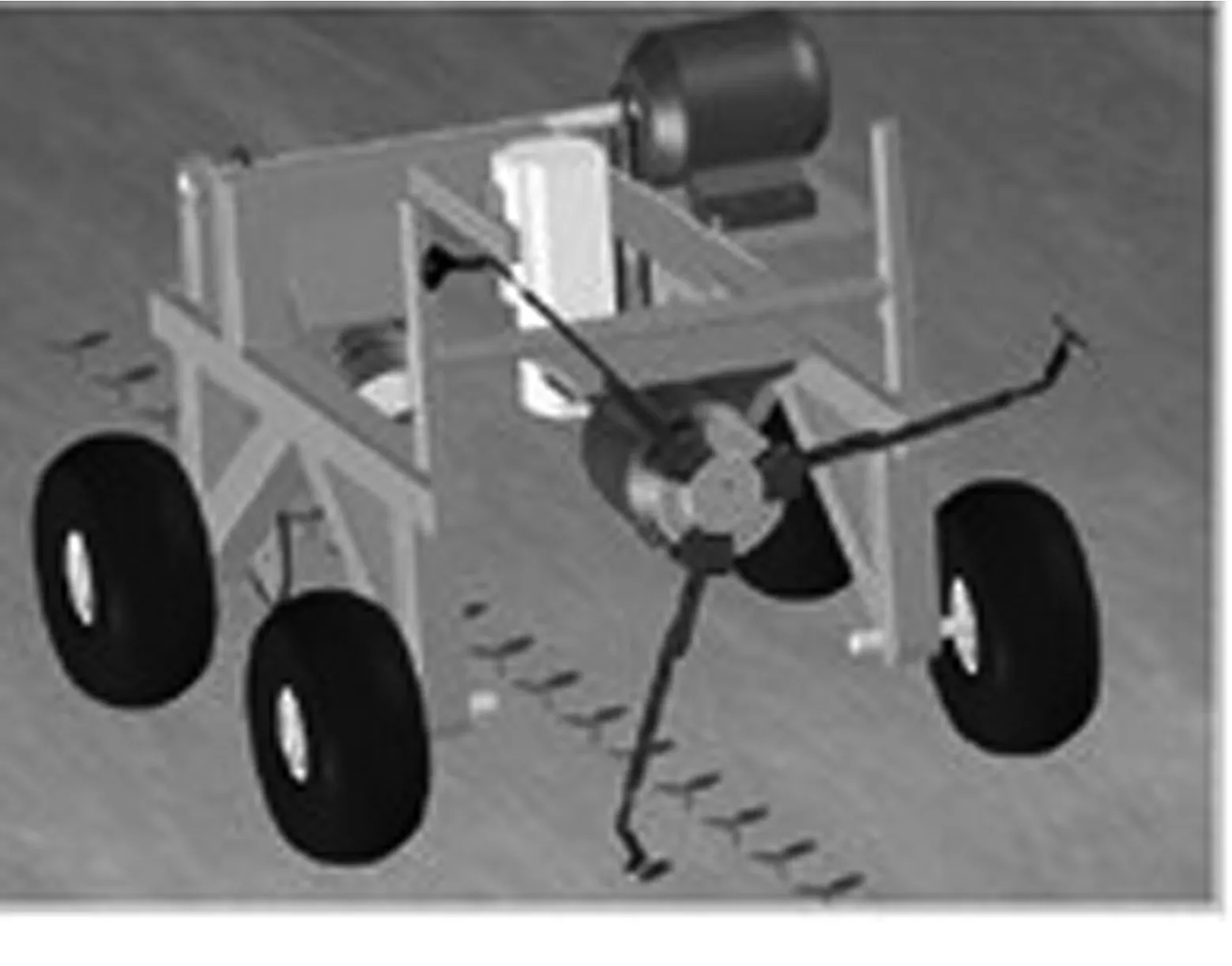
图4 旋转锄Fig.4 Rotary hoe
旋转式圆盘锄的除草部件是一个可旋转的圆盘,为了在株间除草时避免损伤作物,该旋转圆盘边沿处被切掉一部分,形成一个缺口[14],如图5所示。Dedousis等[15]研究结果表明:以1m/s的速度对150mm株距的卷心菜进行除草作业,圆盘除草区域达95%,80%的杂草可得到有效控制,且对作物的损伤率低,未见有卷心菜被圆盘切伤而死。
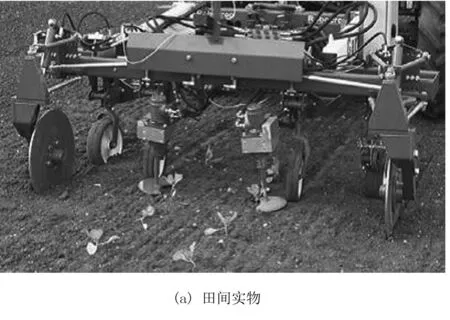
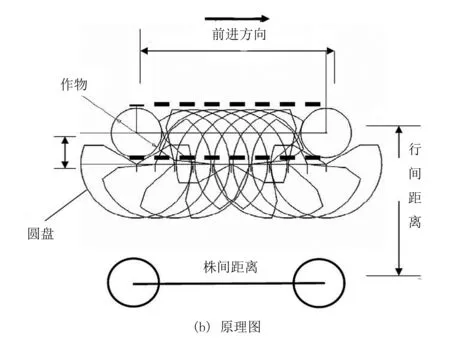
图5 旋转式圆盘锄(不带行间除草刀)Fig.5 Prototype guided rotating disc hoe without inter weeding unit
Home研制的株间中耕系统由“鸭脚”形行间除草刀和株间除草刀构成[16],株间除草刀可做来回运动,如图6所示。该系统使用机器视觉来区别杂草和作物,当检测到作物时,株间除草刀收拢;未检测到作物时,电动机驱动凸轮使株间除草刀展开。根据Home[16]研究,该系统对作物的损伤与作物株距和作业速度相关性很大,随着株距减小或作业速度增加,损伤率随之增加。
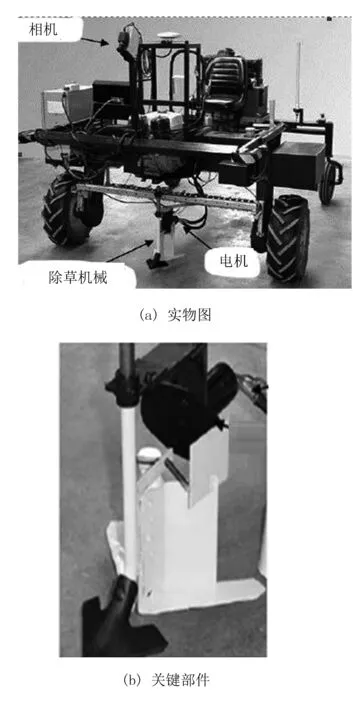
图6 自动除草机器和株间除草刀Fig.6 Autonomous vehicle with intra-row mechanism and intra-row blade
北海道大学的Masaki TERAWAKI[17]研制了一种能在甜菜地自动苗间刀控制系统,如图7所示。系统主要包括CCD相机、计算机、运动控制器及间苗刀,两把苗间刀呈“V”型使其能够闭合或者打开,如图7所示,但系统对杂草的控制效果未见报道。

图7 甜菜除草间苗刀Fig.7 Automatic weeding thinner
日本生研中心[18]研发的果园中耕除草机安装在拖拉机后部三点悬挂的液压驱动式偏移型作业机械上,除草作业部件通过主架和支撑臂连接拖拉机右侧,主架通过液压油缸伸缩可调节除草作业部件的偏移量,如图8所示。该除草机可在树枝伸展的果园中进行植株间的机械除草。

图8 果树除草机Fig.8 Weeder of the orchard
3 机器人智能化株间除草技术
Radis Mechanisation(2010)团队研发出一种在绕轴旋转的机械臂上安装有除草刀株间杂草控制系统[19]。该除草机械的不足之处在于作物检测传感器精度不高,不能准确区分作物和杂草,且其作业速度只有3 km/h(0.77 m/s)。奥斯纳布吕克大学与Amazone Werke合研制了一种机械除草控制系统[12],能除去株间和行间杂草[20]。张春龙等设计出一种除草AGV小车平台[21],在小车上安装一个三爪锄草机械手,如图9所示。小车的仿真实验表明:为有效避免苗株损伤,在作物行两边各安装一组除草机械手时,该系统锄草率可达90%以上,但未见田间试验结果报道。
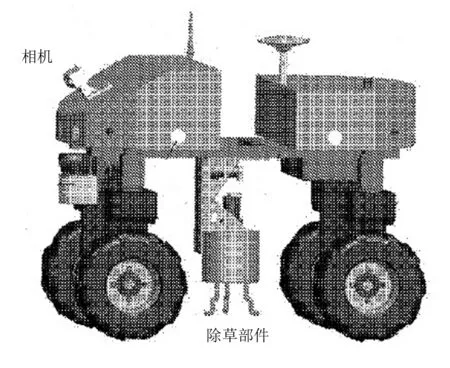
图9 三爪锄草机器人Fig.9 Weeding robot with three-finger manipulator
近年来,传感器和机器人技术成为研究热点,使得依托于这两种技术的除草技术也得到发展,国内外研究人员开展了许多研究。例如,为进行叶菜类移栽初期的除草,日本岛根大学和兵库县立中央农业技术中心从1991年开始共同进行了机器人株间除草的研究[22],由立体视觉检测杂草的三维位置,控制除草刀将杂草及其周围的土一起挖走。Karl D.hanse等研发了一套在甜菜地中能够对作物定位识别的系统[23],该系统基于计算机视觉,在甜菜地里对作物进行定位识别,但目前只能应用于杂草生长初期,且识别精度不高。
Hong Young Jeon等[24]开发了一种机器人杂草控制系统,由摄像机、机械臂和杂草控制机构组成,如图10所示。除草时,上层锯盘先切断杂草,之后下层在杂草切面上涂上除草剂。据报道,该系统在摄像机视野内除草成功率为83%。
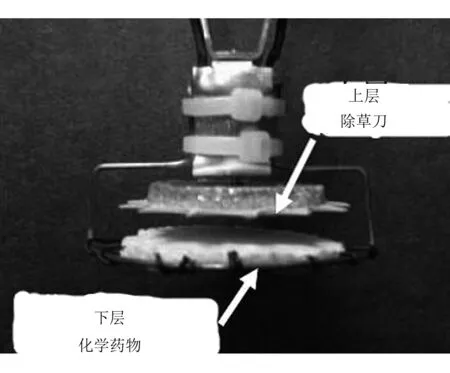
图10 杂草控制机构Fig.10 Machine of weeding control
塞维利亚大学(Universidad de Sevilla)M. Pérez-Ruiz等研发出适用于移植农作物的株间除草刀自动控制系统[25],如图11所示。该系统基于实时GPS系统来自动检测作物地理位置,并控制1对除草刀除草路径,使之沿着行中心线在作物间运动。试验在加利福利亚番茄地中以0.8~1.6km/h的速度行进,结果证明:只要操作者靠近作物区域范围在±0.5cm内,则速度0.8km/h时的标准差为0.9cm,速度1.6km/h时的标准差为1.39cm。

图11 番茄除草刀路径控制系统Fig.11 Tomato weed knife path control system
南京林业大学进行了机械臂除草研究(陈勇 等,2007;郭伟斌 等,2009),设计的除草机器人由本体、多关节机械臂、末端执行器及摄像头等组成。工作时,机器人通过视觉导航沿作物行自主行走,识别出杂草后接近目标杂草并执行除草任务,除草刀盘高速旋转切割杂草茎叶,再将除草剂涂抹到断茎茬断面上,然后继续前行。
Lin Chen等[26]提出了一种除草平台的自动调平系统,如图12所示。机器人在株间行走除草时,末端执行器不随底盘姿态变化而倾斜。试验数据表明:调平后割草刀的倾斜度低于0.25°,横滚俯仰角低于9°,但仅适用于大白菜和洋葱除草。
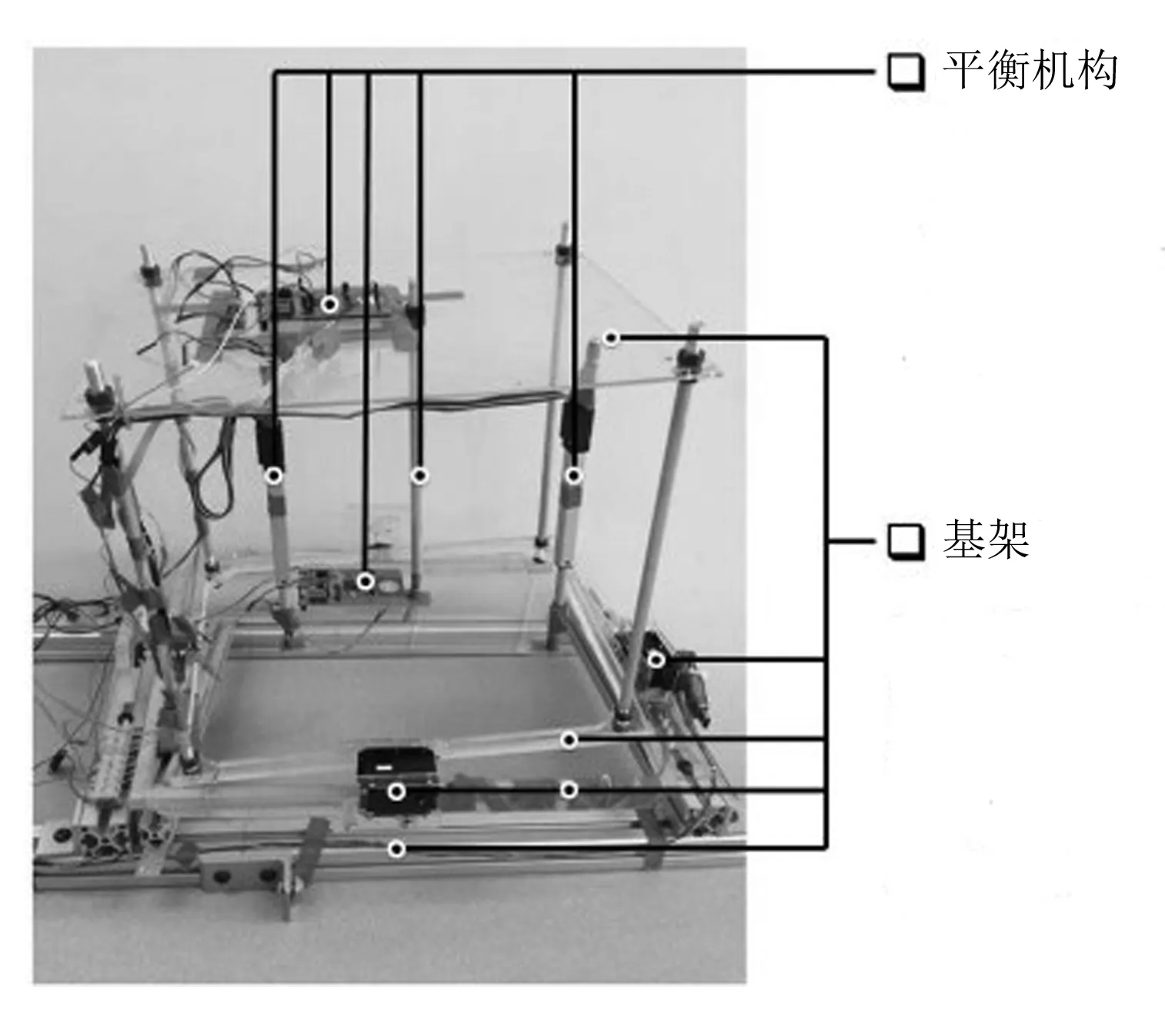
图12 除草机器人自动调平系统Fig.12 Levelling system for weeding robot
日本福井大学和南昌航空大学[27]联合研制了一款水田机器人来进行水田除草[18]的理论模型,设计了一个机械臂安装在小车上,利用立体相机观察稻田,传递处理信息给稻田机器人,从而达到远程控制机器人去除杂草的目的。机器人主要具备3种能力:①在水田中作业时能探测到障碍物;②智能化操作和移动;③所有的作业均能通过遥控来进行。水田除草机器人如图13所示。
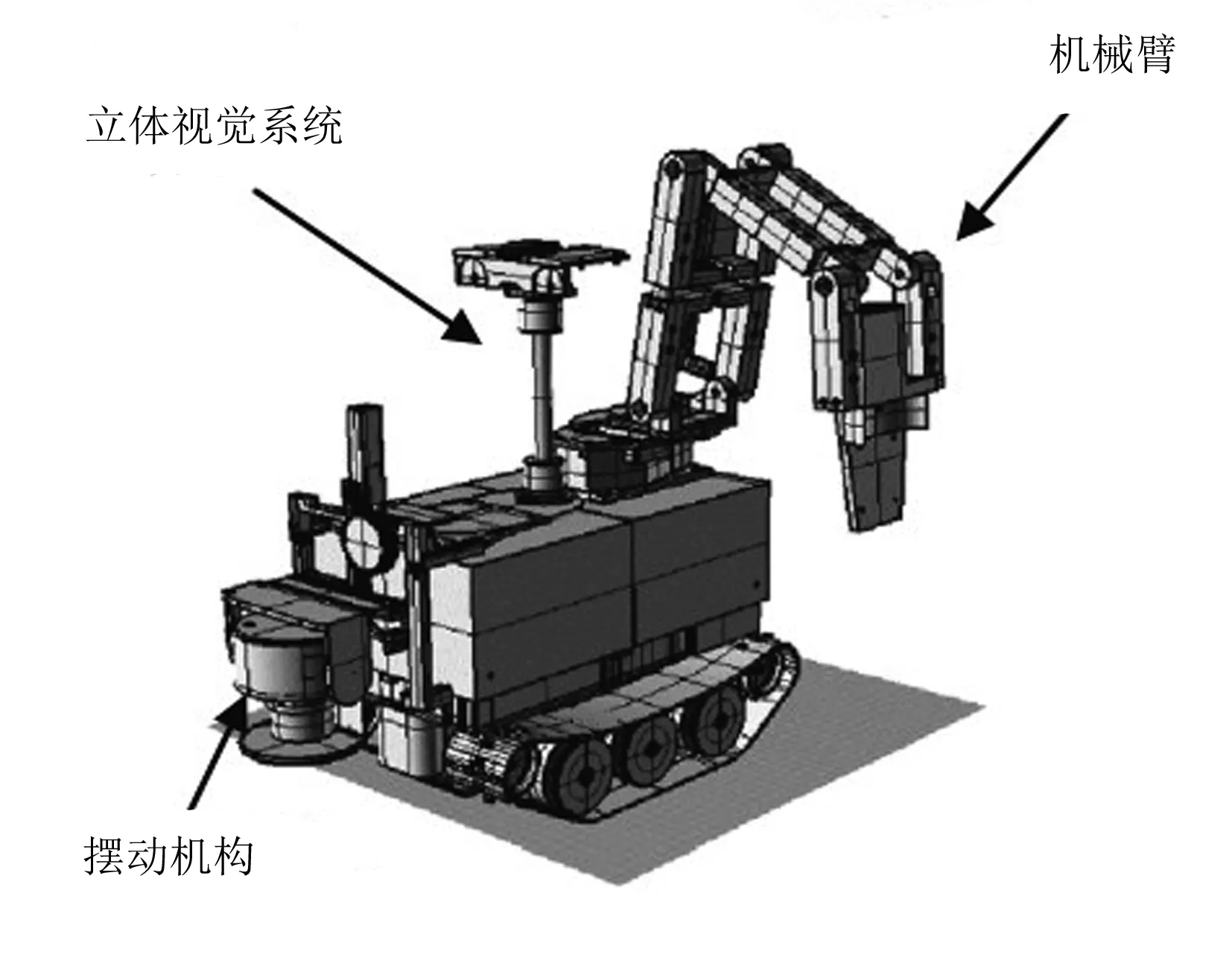
图13 水田除草机器人Fig.13 Weeding robot for paddy field
奥尔胡斯大学的Bo Melander等[28]在洋葱地和白菜地分别做了两个对比试验,以除草和收获效果为准。在两块作物地智能除草试验中,仅能估计除草效果。试验结果显示:智能化除草系统在该试验中与简单除草方式有差异,其在不需要人工操作的情况下能够有效控制杂草。试验装置如图14所示。
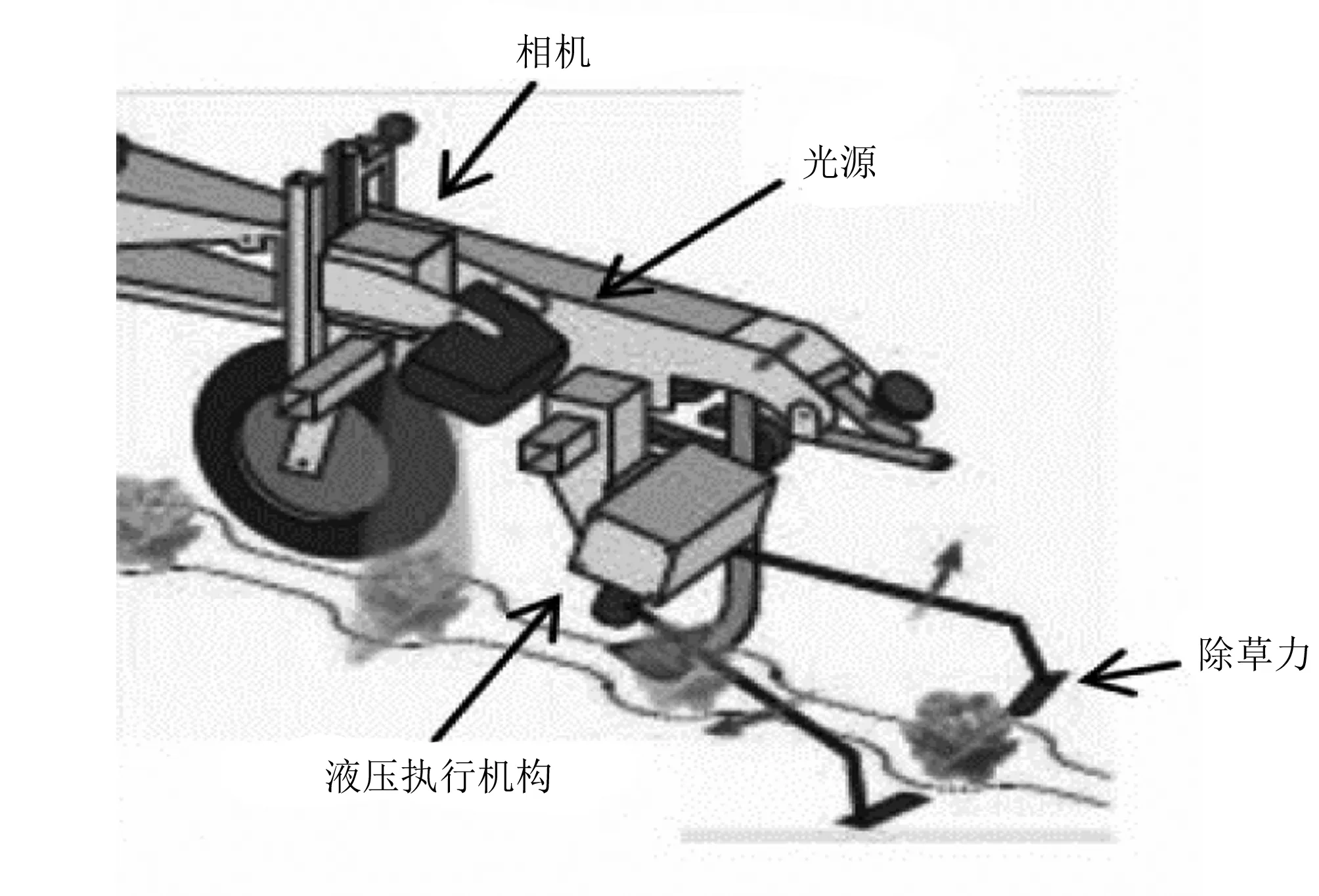
图14 智能株间机械除草刀Fig14 intelligent mechanical intra-row weeder
4 总结和展望
本文对国内外智能化机械株间除草技术做了综述,并对其关键技术进行了介绍和评价。然而,目前国内对智能化株间机械除草技术与机具的研究还较少,主要集中在株间机械除草机构的结构设计与研究,至今未见有成熟的智能化株间除草系统应用于农业实践。存在的主要问题有:
1)目前智能农业已经成为各大高校及相关科研机构的研究热点,也有较多研究成果面世;但是,多数都是从某个方面来解决部分问题,没有从农业机具的整套系统角度来着手研究,绝大部分研究都偏向于图像处理领域,在实际应用中还存在一定问题。
2)识别并定位作物是目前株间机械除草的重点和难点。农田作物行不像工业自动化轨道那样可以做到几近直线或路径比较规整,植株也不像工件那样可以做到标准化,各植株间差异较大,所以作物识别与定位成为一大难题。解决这一问题有很多方法,可使用传感器、机器视觉和GPS定位技术等。就目前的研究程度来说,传感器能很好地区分杂草和作物,但精度有待提高;基于机器视觉技术的研究又受当前图像采集、传输和算法处理速度的影响,导致作业效率不高,且田间环境多变,识别算法没有较好的适应性;GPS定位技术,其系统较为复杂,成本昂贵,作业时需要精确的路径图,在田垄间作业也不灵活,目前还难以得到广泛应用。
3)目前,对于株间机械除草技术的研究主要集中在像蔬菜等一些植株较矮的作物上,机械可以横跨在农田上进行作业。像果园类等植株较高的作物,相关理论研究报道较少,这类作物都要求机械能够在植株之间工作,由作物的侧面进入进行除草作业,靠近作物时退出避免损伤作物。
通过以上问题分析不难发现:在现有的一些研究中,虽然应用了自动导航技术进行作物定位跟踪,但其精度难以满足株间除草的需要。因此,研究结构简单的株间机械除草装置和可靠的控制系统、通过低成本传感器实现高精度自动作业,有助于加速株间机械除草技术的研究进度与应用推广。随着算机图像处理算法的不断更新,深度学习技术应用更加广泛,智能化株间机械锄草技术也将会迎来更大的发展机遇,把各种作物、和杂草的相关特征参数做成数据库,实现作物株间机械除草在线实时控制,目前存在的作物识别与定位的难题将会得到更好的解决,全过程自动高效高质量的作物株间机械除草将不难实现。
猜你喜欢
今日农业(2022年15期)2022-09-20
科教新报(2022年22期)2022-07-02
趣味(作文与阅读)(2022年3期)2022-06-10
今日农业(2021年5期)2021-11-27
今日农业(2021年21期)2021-11-26
今日农业(2020年20期)2020-12-15
今日农业(2020年17期)2020-12-15
世界农药(2019年4期)2019-12-30
高中生学习·阅读与写作(2019年2期)2019-09-10
今日农业(2019年10期)2019-01-04