基于焊接工艺的悬臂式重载码垛机械手
2020-01-09 04:04陈雪松侯荣国
山东理工大学学报(自然科学版) 2020年2期
陈雪松,侯荣国,吕 哲,王 涛,张 宇
(山东理工大学 机械工程学院,山东 淄博 255049)
码垛机械手操作方便、适应性强,在工业生产过程中可以节省大量的人力物力,提高生产效率和经济效益,降低工人的工作强度[1]。随着生产规模的不断扩大和劳动力成本的提高,市场对码垛机械手提出了更高的要求,为了使机械手向高速、重载、高精度、高灵活性方向发展,需要不断改进机械手的结构设计以适应市场的需求。
针对机械手结构优化,很多学者做了大量研究,主要集中在以下几个方面:(1)通过优化算法或有限元分析,调整零件局部的形状,如改变壁厚、设置局部加强筋或者去除部分材料,做轻量化设计以及最大刚度设计[2-4];(2)利用仪器如电阻应变片测量和分析复杂承力构件的应力分布,以便校核和改进设计[5];(3)通过模态分析计算机械手局部或整体结构的固有频率,在运行时避开这些频率,防止发生共振[6-7]。然而,针对机械手本身制造工艺的研究却很少,机械臂大多采用铸造工艺,但是铸件机械性能差、难以精确控制、质量不稳定,而且铸造生产过程中会产生大量粉尘、有害气体,污染环境,危害工人健康,因此改进机械臂的制造工艺是非常必要的。
本文设计了一种三自由度重载精密码垛机械手。通过SolidWorks建立三维实体模型,利用ANSYS和ADAMS进行力学分析,以期通过改进机械臂的局部结构来提高机械手的强度和刚度,适应工业生产的需求。
1 悬臂式重载码垛机械手整体结构
该码垛机械手采用多关节式平行四边形结构,整体结构如图1所示。整体机构由运动机构和平衡机构组成,两者相互关联但互不影响。运动机构由大臂、小臂和两连杆组成的平行四边形连杆机构Ⅰ组成,由两个伺服电机分别驱动大臂和一个连杆作回转运动,在连杆机构的作用下小臂作相应运动。平衡机构由两个平行四边形连杆机构组成,基座、大臂、平衡连杆1和V形架组成平行四边形连杆机构Ⅱ;小臂、手爪安装座、平衡连杆2和V形架组成平行四边形连杆机构Ⅲ。平衡机构使得机械手运动时保持手爪安装座底端始终水平,即机械手末端执行器的工作位姿始终保持不变[8]。考虑到生产线布局和空间的限制,与以往的码垛机械手不同,该机械手采用悬臂式结构,基座位于机械手系统的最上方,不占用地面空间,结构紧凑,有利于车间的良好布局。该机械手能实现3种不同方向的运动:大臂左右摆动、小臂上下摆动和腕部旋转运动。

图1 码垛机械手机械结构Fig.1 The mechanical structure of palletizing robot
由于该机械手的技术要求是抓取并移动1 000 kg的目标重量,而且机械手自重将近3 000 kg,自身重量对机械手运行的稳定性、刚度及精度也会产生很大影响,所以该码垛机械手的主要部件,如大臂、小臂、连杆、基座及腕部均采用焊接成形制造工艺。其主要优势是可以方便地将加工完成后的板材根据需要进行组合焊接,从而减轻自重、节省材料、降低成本、方便加工、降低操作难度,并且结构刚度大、整体性好,适合高强度、大刚度的中空结构,能保证该机械手运动平稳、强度变形量满足设计要求。
2 工作状态下主要部件静力学分析
由于该码垛机械手的负载和自重均很大,有必要对其进行静刚度分析。在码垛作业过程中,机械手的位姿不断变化,在所受力矩最大的位置,利用ANSYS中Static Structural模块对大臂、小臂进行静力学分析,得到应力分布和变形云图,分析承力构件的危险位置,找到零件的薄弱点及应力集中区,从而为机械手局部结构的优化提供理论依据[9]。
首先,利用SolidWorks进行三维建模,在进行有限元分析之前,需要对模型进行几何简化,即忽略对零件变形影响不大的螺纹孔、工艺孔及圆角、倒角等几何特征,有利于提高划分网格的质量,保证模拟的准确性和可靠性[10]。
机械手的大臂和小臂通过钢板组合焊接而成,由于焊接接头性能优异,所以对材料本身性能要求不高,因此机械臂材料选用普通碳素结构钢Q235,材料性能参数见表1。由于该结构钢含碳适中,强度、塑性和焊接等性能可以得到良好的配合,焊接件疲劳强度高,并且价格低廉,可有效降低制造成本。
表1 Q235碳素结构钢性能参数
Tab.1 The performance parameters of Q235 carbon structure steel

密度/(g·cm-3)弹性模量/GPa泊松比抗拉强度/MPa屈服强度/MPa7.852100.3380235
2.1 大臂零件静力学分析
大臂零件网格划分选用20节点的186号单元类型,对于关键部位,如钢板焊接处、两端轴连接处进行网格细化处理,网格划分完成后共有376 132个节点,235 670个单元。对机械臂施加约束和载荷,在大臂上端圆周进行面约束,下端孔施加载荷,然后进行静刚度计算,查看应力分布情况及变形量,安全系数取1.5,得到的分析结果如图2、图3所示。
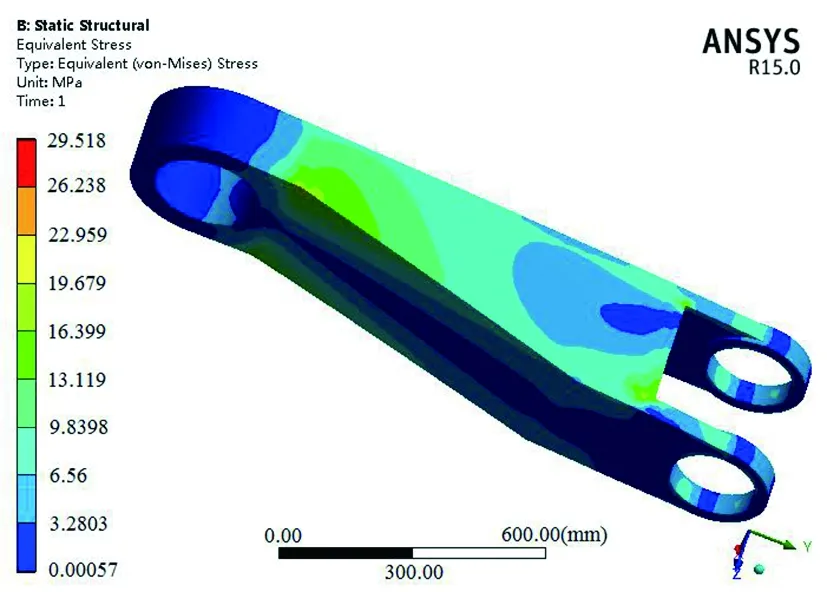
图2 大臂应力分布云图Fig.2 The stress distribution contour of big arm
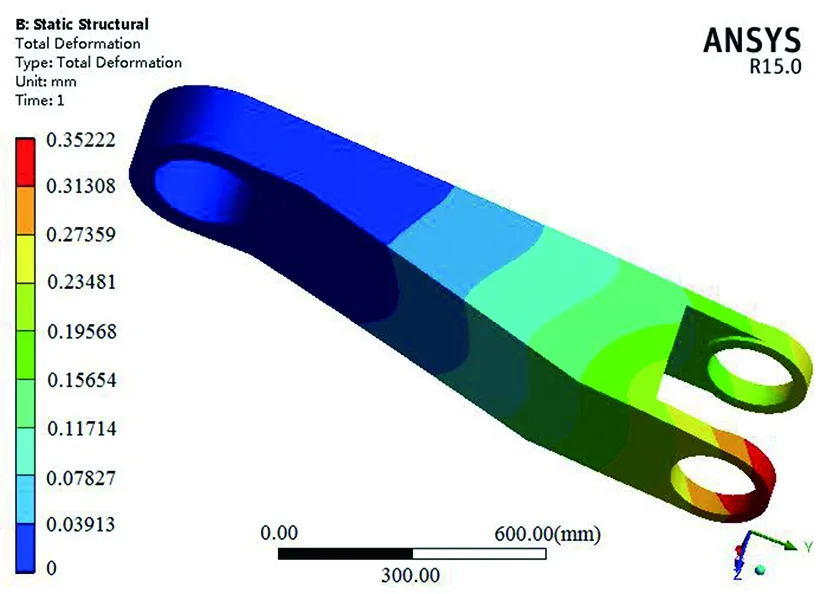
图3 大臂变形云图Fig. 3 The deformation contour of big arm
从图2和图3中可以看出,应力主要分布在钢板焊接接头处,即钢板边缘,在钢板中部应力很小。最大应力为29.518 MPa,材料最大应力强度极限为235 MPa,大于44.277 MPa(29.518×1.5),满足结构刚度要求。最大变形量为0.352 mm,相对于大臂的长度,变形量可以忽略不计,能保证机械手具有较高的工作精度,证明该结构设计合理有效。
2.2 小臂零件静力学分析
小臂零件的静应力计算过程与大臂零件类似,在小臂右端和中部孔进行面约束,左端孔施加载荷。应力和变形云图如图4、图5所示。

图4 小臂应力分布云图Fig. 4 The stress distribution contour of small arm

图5 小臂变形云图Fig. 5 The deformation contour of small arm
从图4和图5中可以看出,在满负载情况下,应力主要分布在小臂前半部分钢板焊接处,后半部分所受应力很小,可在后半部分去除适量材料,减轻小臂重量,做轻量化设计,对整体刚度几乎无影响。小臂承受的最大应力为39.803 MPa,出现在中部连接件与小臂连接的位置,因为连接处采用焊接工艺,焊接接头力学性能良好、刚度大,所以结构强度满足设计要求。最大变形量为0.147 mm,在允许范围之内,小臂在该工况条件下能安全稳定运行。
3 机械手运动学分析
为了保证码垛机械手运行快速、平稳实现所设计的运动要求,利用ADAMS对机械手进行运动学分析[11]。将SolidWorks装配模型另存为Parasolid x_t格式,导入ADAMS中[12],并定义各部件的材料属性,自动计算出转动惯量和质量,确定各部件的质心。根据运动要求,对模型添加约束及转动副,模拟整个工作行程,包括提升,平移,下放,复位4个阶段。如图1所示,大臂和小臂只有Y、Z两个方向上的运动,大臂和小臂在Y方向上的速度与加速度变化如图6、图7所示,大臂和小臂在Z方向上的速度与加速度变化如图8、图9所示(图中实线为小臂,虚线为大臂)。

图6 大臂和小臂在Y方向的速度变化曲线Fig. 6 The velocity curves of big arm and small arm in Y direction

图7 大臂和小臂在Y方向的加速度变化曲线Fig. 7 The acceleration curves of big arm and small arm in Y direction
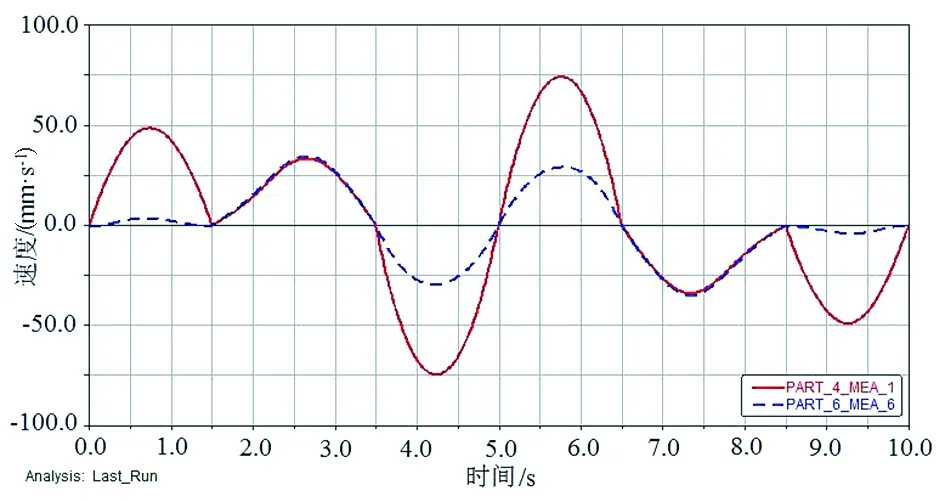
图8 大臂和小臂在Z方向的速度变化曲线Fig. 8 The velocity curves of big arm and small arm in Z direction

图9 大臂和小臂在Z方向的加速度变化曲线Fig. 9 The acceleration curves of big arm and small arm in Z direction
由图6—图9可知,机械手大臂和小臂的控制精度较高,结构合理、运动平稳且控制性能良好。
4 结束语
本文设计了一种悬臂式重载码垛机械手,为了提高其结构刚度、降低制造成本,该机械手的主要零件采用了焊接制造工艺。利用ANSYS和ADAMS对大臂和小臂进行的静力学及动力学仿真表明,大臂和小臂的强度和刚度完全满足设计要求,且控制灵敏度较高,运行平稳、快速。该设计还能节省材料、降低加工难度,为下一步码垛机械手系统结构的分析和改进提供了理论支持。
猜你喜欢
橡塑技术与装备(2022年11期)2022-11-08
南方农机(2022年20期)2022-10-20
现代制造技术与装备(2022年1期)2022-02-21
渤海大学学报(自然科学版)(2021年3期)2021-12-27
商品与质量(2021年41期)2021-12-04
包装与食品机械(2021年5期)2021-11-06
科学技术创新(2021年13期)2021-05-16
家庭百事通·健康一点通(2020年11期)2020-11-30
科学时代·上半月(2013年6期)2013-08-22
少林与太极(2011年8期)2011-11-17