
小型农用履带车辆通过性仿真与分析
2020-03-06 09:20郭凯文李军政孙超然孙松林唐卫国
农业工程与装备 2020年3期
郭凯文,李军政,孙超然,孙松林,唐卫国
小型农用履带车辆通过性仿真与分析
郭凯文1,2,李军政1,孙超然1,孙松林1,唐卫国1
(1.湖南农业大学机电工程学院,湖南 长沙 410128; 2.湖南国防工业职业技术学院,湖南 湘潭 411207)
为提升小型农用履带车辆在南方丘陵山区复杂环境下作业的适应能力,对某型小型农用履带车辆在定型农业路况下的通过性进行仿真与分析。利用Creo三维软件建立小型农用履带车辆的三维模型并导入多体动力学分析软件RecurDyn,对农用履带车辆在两种路面(硬质、软质)的平地直线行驶、3种沟宽(400mm、700mm、900mm)的越沟通过性、3种障碍物高(150mm、260mm、380mm)的越障通过性、3种斜坡(10°、20°、30°)的爬坡通过性进行仿真,分别得到农用履带车辆运动学规律,为进一步优化农用履带车辆结构提供参考依据。
履带车辆;通过性;仿真与分析;越障性能
履带式底盘具有接地比压小、转向灵活、路面适应性和机动性好等优异性能,更适用于丘陵山区农用机械[1]。近些年国家对农机逐渐重视与支持,履带式农机在理论和产品研发上都得到了飞速发展[2-3],采用缩短研发周期并降低成本的虚拟样机仿真研究成为重要方式。Francesco等利用动力学软件建立了农用履带车辆的多体动力学模型并研究了其运动特性[4]。李军政等人对农机履带进行建模仿真与试验研究获得了履带板结构参数与土壤相互作用规律[5-6]。王保卫等对农用履带收割机在典型路况下的动力学进行仿真分析并验证了模型及方法的真实性[7]。王慧、刘洁等人对小型履带拖拉机越障性能进行了爬坡、越沟、越台阶等典型工况的性能分析,并借助Matlab对履带拖拉机结构参数与越障性能的内在联系进行了分析[8]。陈安成等运用多体动力学软件RecurDyn仿真分析了履带车辆在水平路面的行驶工况及平顺性和可靠性[9]。吴哲等设计了一种简易履带底盘并仿真分析了其通过性[10]。王川伟等提出了一种自适应调平农用底盘并对其进行仿真分析验证其有效性[11]。可见虚拟仿真技术在履带农机设计中应用广泛。笔者借助虚拟仿真技术研究小型农用履带车辆的通过性,为提升其对南方丘陵地区复杂作业环境的适应性提供参考依据。
1 仿真模型建立与参数设置
1.1 几何模型建立
以当前南方较通用的一款小型农用履带车辆1GL-2000F履带自走式旋耕机为研究对象,其主要技术参数如表1所示。
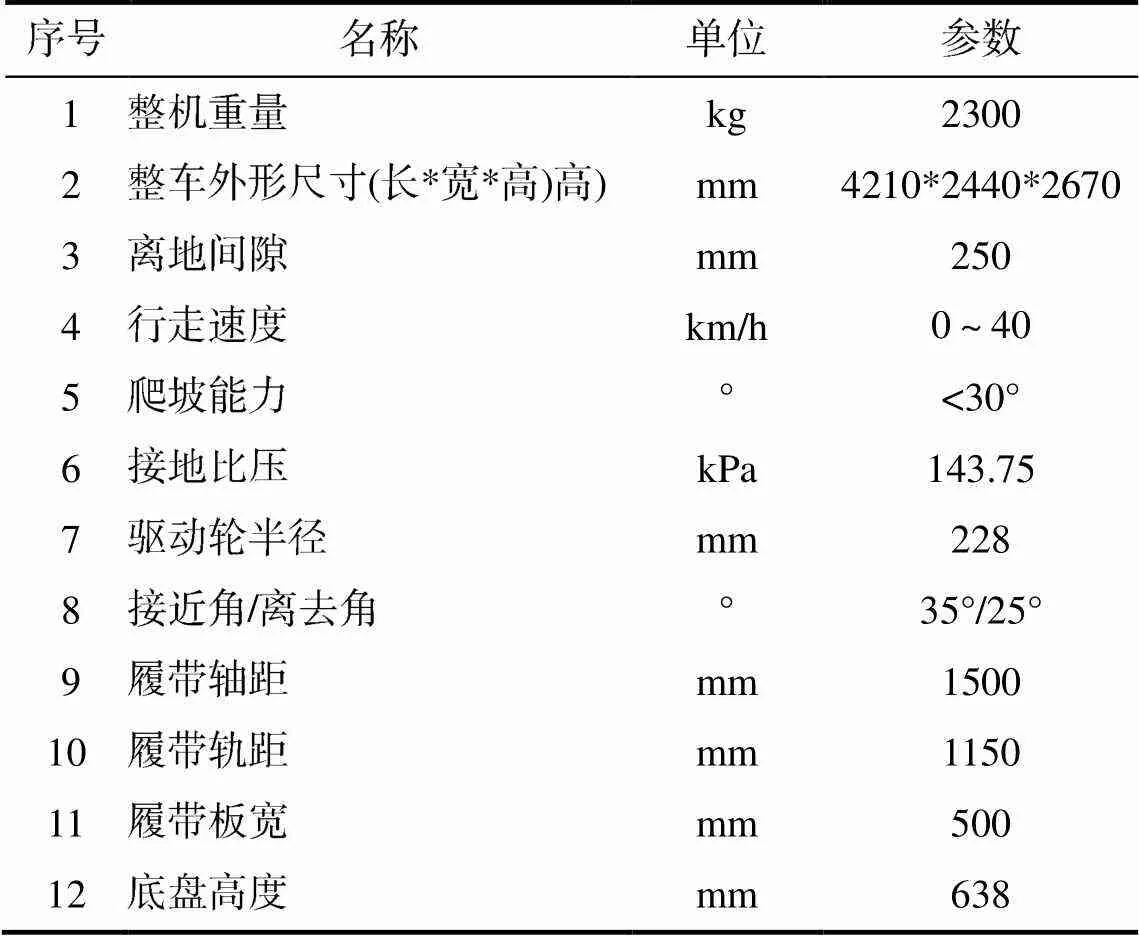
表1 1GL-2000F履带自走式旋耕机主要技术参数
首先使用三维软件Creo对其车体结构进行简化建模,并以Parasolid(x_t)格式保存导出。在RecurDyn中的低速履带模块Track-LM中建立履带底盘的驱动轮、张紧轮、承重轮、支撑轮、履带板等组件,再将各组件添加约束、摩擦系数、地面环境以及边界条件,最后再对车体与建立的履带底盘进行装配,车体整体装配如图1所示。

图1 小型农用履带车辆底盘三维模型
1.2 履带动力学模型建立
在RecurDyn中将履带底盘装配好后的三维模型导入RecurDyn软件中与履带底盘进行二次装配,最终得到完整的动力学模型。其中履带各组件添加约束的方法如表2所示。

表2 履带底盘约束设置表
在驱动轮的铰接处添加运动函数STEP函数(式1),这是一个3次多项式逼近阶跃函数,能够较为真实地反映驱动轮逐渐加速的过程。
函数STEP(,0,0,1,1)
当≤0时:STEP=0
当0≤≤1时:


式中:为STEP函数的自变量;0,1分别为自变量的初始值和结束值;0,1分别为STEP函数的初始值和结束值。
1.3 路面模型建立
在进行路面仿真运算时,路面由许多尺寸非常小的矩形方块单元块构成,RecurDyn中内置用于仿真的接触力公式(式2),从而能够计算出地面与履带间的水平摩擦力和履带给予地面的正压力。
=-(-0)(2)
式中:为接触碰撞前地面位置参数;0为接触碰撞后地面位置参数;0为沉陷深度,mm;为变形指数;为接触刚度系数;为地面阻尼系数。参数取决于履带所用材料类型、履带的尺寸等,地面与履带间的摩擦力由库仑摩擦定律计算得出。
本次履带车辆底盘仿真模拟路面选用农业中典型的沙土硬质地面和黏土软质地面进行参数设置。根据查阅资料设置路面模型参数[12]如表3所示。

表3 路面模型参数
2 仿真结果与分析
2.1 平地通过性
分别在沙土与黏土两种路面进行仿真,首先对履带车辆设置速度,使履带车辆从0.1~1s加速,1s后达到5km/h的速度并保持匀速行驶,从RecurDyn中提取驱动轮力矩、质心速度、承重轮受力、质心的俯仰角数据,整理拟合后得到曲线图如图2所示,图中绿色表示履带车辆在沙土土壤行驶数据,蓝色表示履带车在黏土土壤行驶数据。
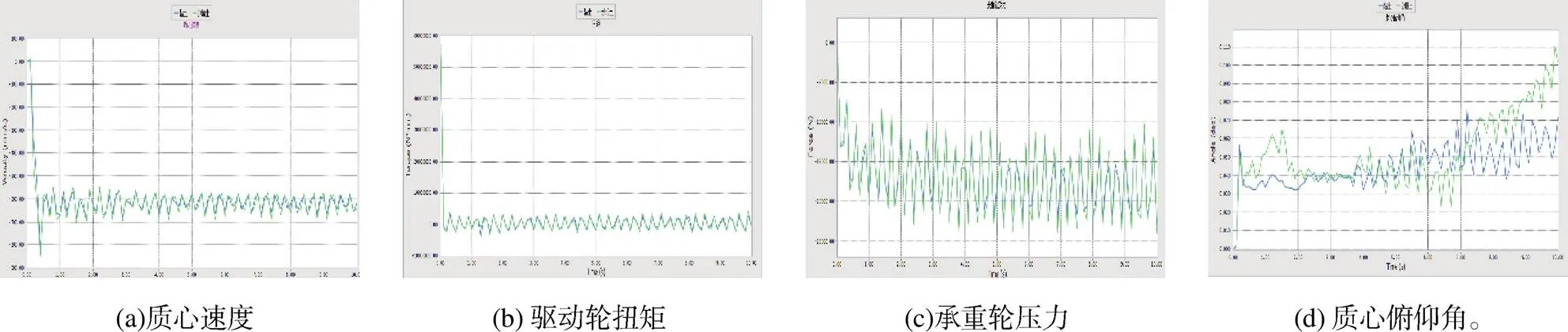
图2 平地通过性仿真
由图2(a)可知,两种路面到达稳速时间基本一致,说明履带车辆在两种路面具有很好的通过性。由图2(b)驱动轮转矩仿真结果可知,在黏性土壤路面匀速行驶过程中的驱动轮转矩较大,因此在水田作业时应加驱动力,以免发生沉陷。由图2(c)承重轮压力仿真结果可知,履带车辆在硬质土壤路面行驶的承重轮压力明显高于在黏性土壤路面行驶,因此要减少在硬质路面长时间行驶,防止硬质路面对履带的磨损。由图2(d)质心俯仰角的仿真结果可知,履带车辆在软质地面加速过程中没有发生滑移,在减速阶段履带车辆受到软地土壤的阻力作用俯仰角波动比较小,在硬质路面上履带车辆俯仰角的波动没有很大改变。
2.2 越沟通过性
在RecurDyn软件中沙土与黏土路面中分别设置深为300 mm、宽为400 mm、700 mm、900 mm的三种沟对本履带车辆进行仿真,如图3所示。提取质心速度、承重轮受力、质心的俯仰角以及改变质心后的俯仰角等数据拟合得到曲线图如图4所示。

图3 越沟行驶仿真
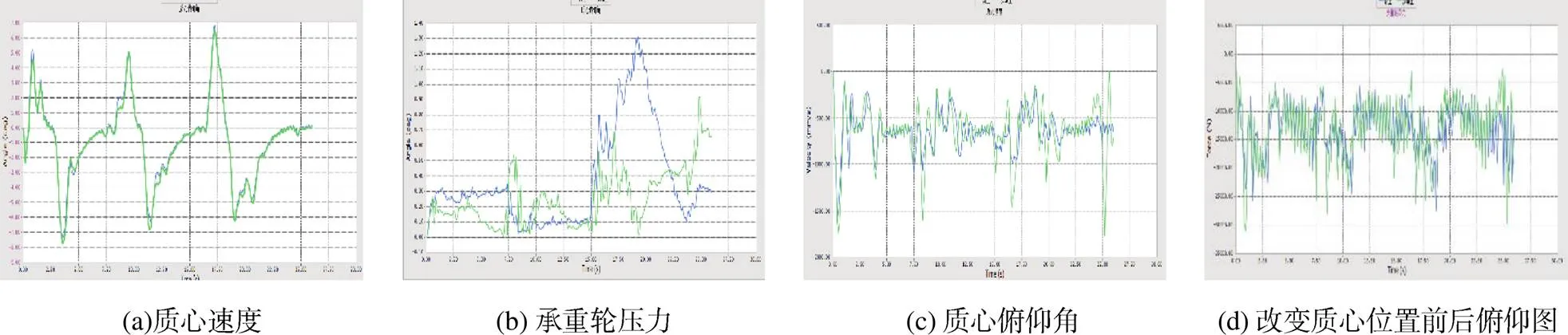
图4 越沟行驶仿真结果
履带车辆在越沟时,由图4(a)质心速度仿真结果可知,履带车辆在0~2s启动后保持匀速进行行驶;履带车辆2.5~5s经过第一沟宽400 mm,7.5~10 s经过第二沟宽700 mm,15~20s经过第三沟宽900 mm;随着沟宽增加质心速度波动增大且在沙土壤中质心速度波动更强烈,履带车辆在沙质土壤会发生刚性碰撞。由图4(b)承重轮压力仿真结果可知,履带车辆在沙质土壤路面行驶的履带承重轮压力明显高于在黏性土壤路面行驶;说明沙土对履带车辆的反作用力大,而黏土使其接地比压减小。由图4(c)质心俯仰角的仿真结果可知,履带车辆在越沟行驶时履带车辆的俯仰角波动较小,而在越沟时都出现不同程度的波动,沟宽越宽其波动更大。由图4(d)可知,当履带车辆质心后移100 mm后质心的俯仰角波动范围变大,履带车辆容易发生侧翻。
2.3 越障通过性
在RecurDyn软件的沙土与黏土两种路面中设置150 mm、260 mm、380 mm三种不同高度的障碍物对履带车辆进行仿真,在黏土越障仿真中履带车辆的质心位置的改变如图5所示。
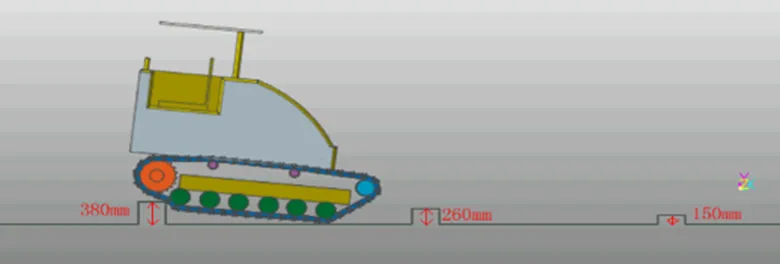
图5 履带车辆越障行驶仿真
从RecurDyn软件中提取质俯仰角等数据进行拟合得到如图6所示的曲线图。
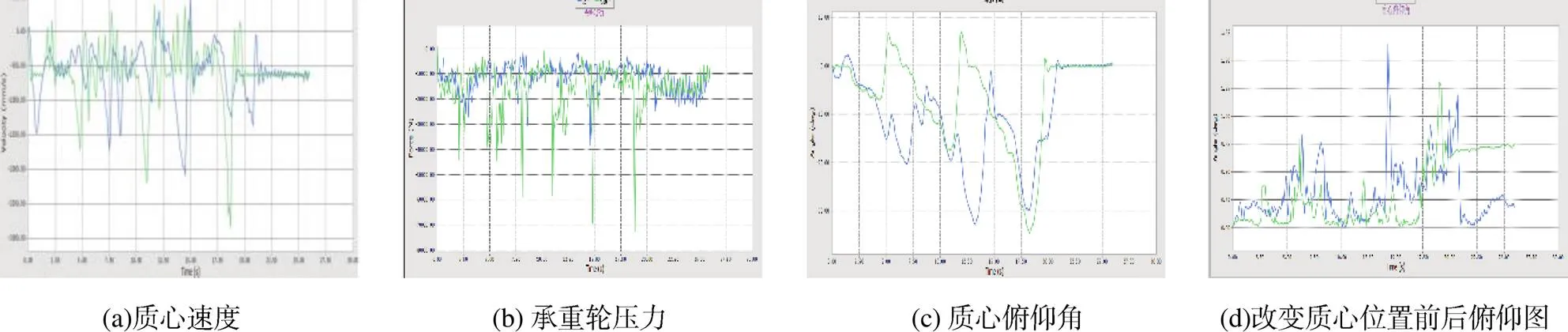
图6 履带车辆越障行驶曲线图
由图6(a)可知,履带车辆在0~2.5s启动,然后保持匀速进行行驶,3.5~9s时经过第一个150 mm高障碍物,10~15s经过第二个260 mm高障碍物,17.5~21s经过第三个380 mm高障碍物,说明履带车辆在沙质土壤易发生刚性碰撞。由图6(b)承重轮压力仿真结果可以看出,履带车辆在沙质土壤路面行驶的履带承重轮压力明显大于在黏性土壤路面行驶;这是由于在越障碍物时障碍物的沙质土壤对履带车辆的刚性反作用力大,而黏土壤的障碍物边沿会发生沉陷,土壤发生流变使其对履带车辆的承重轮压力变小。由图6(c)俯仰角的仿真结果可知,履带车辆在高黏性土壤中越沟更易发生侧翻。由图6(d)改变质心位置的仿真结果可知,将履带车辆质心后移100 mm;由图6可知,当履带车辆在黏土越障行驶时,履带车辆质心后移,质心的俯仰角波动范围变大;与越沟相同,履带车辆质心后移在越沟时俯仰角增大,履带车辆容易发生侧翻。
2.4 爬坡通过性
在RecurDyn软件的沙土与黏土两种路面中设置3种不同的坡度(10°、20°、30°)对履带车辆进行仿真,在黏土壤进行爬坡中履带车辆的质心位置的改变如图7所示;从RecurDyn软件中提取质心速度、承重轮受力、质心的俯仰角以及改变质心后的俯仰角等数据,再把数据进行拟合得到图8所示的曲线图。
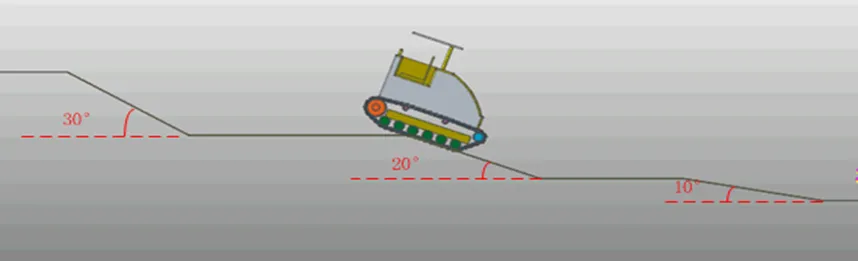
图7 履带车辆爬坡行驶仿真

图8 履带车辆爬坡行驶曲线图
履带车辆在两种路面爬坡时,由图8(a)履带车质心速度仿真结果可知,履带车辆在0~2s启动后保持匀速进行行驶,10~13s经过第一个坡度10°,22~28s经过第二个坡度20°,42~45s经过第三个坡度30°。由图8(a)、图8(b)、图8(c)综合可知,履带车辆在爬10°、20°斜坡时,不论是沙土还是黏土地面都能平稳通过,而到斜坡为30°时,在黏土地面履带车辆发生侧翻,说明履带车辆在湿软的泥土里易打滑、侧翻;当将履带车辆的质心后移时,履带车辆在黏土中爬坡俯仰角将增大,这说明爬坡时履带车辆前轮抓地力不足,易发生侧翻。
3 结语
通过对小型农用履带车辆在沙性和粘性两种地面的平地直线行驶、越沟、越障、爬坡等通过性能进行仿真研究,获得了其质心速度、承重轮受力、质心的俯仰角以及改变质心后的俯仰角等规律曲线,结果表明同样条件下黏性地面有助于减小履带车辆的接地比压,车体行驶的稳定性较好,但是履带车辆在越沟、越障和爬坡时容易发打滑和侧翻,而且随着质心后移将加大这种倾向。
[1] 刘妤,谢铌.小型山地履带底盘设计与仿真分析[J].机械设计,2020(6):115-122.
[2] 王锋,杨玲.一种三角履带式果园动力底盘的设计与研究[J].农机化研究,2019(05).
[3] 孙术发,任春龙.基于履带式底盘的改进型森林消防车通过性[J].农业工程学报,2018(17).
[4] FRANCESCO MOCERA,ANDREA NICOLINI.Multibody simulation of a small size farming tracked vehicle[J].Procedia Structural Integrity,2018(8):118-125.
[5] LI J,LIU S,DAI Y.Effect of grouser height on tractive performance of tracked mining vehicle[J].J Braz.Soc.Mech.Sci.Eng,2017 (39):2459-2466.
[6] 李军政,孙松林,彭姣春.履带板牵引性能试验研究[J].农业装备与车辆工程,2017,55(10):15-18.
[7] 王保卫,冯勇.农用履带收割机典型路况下的动力学仿真分析[J].机械设计,2015,32(10):33-37.
[8] 王慧,刘洁.小型山地履带底盘设计与仿真[J].林业科技,2014,39(4):77-81.
[9] 陈安成,穆希辉,杜峰坡,等.基于RecurDyn的小型履带车的建模与仿真[J].机械设计,2013,30(10):36-39.
[10]吴哲,马岩,杨春梅,等.简易履带式行走机构的设计及通过性分析[J].林业机械与木工设备,2013,41(12): 14-16.
[11]王川伟,彭凤娟,李海涛,等.丘陵山区农用自适应调平底盘设计与试验[J].农业机械学报,2017,48(12):42-47.
[12]王治林.高驱推土机履带行走机构研究[D].吉林:吉林大学,2012.
[13]刘义.RecurDyn多体动力学仿真基础应用与提高[M].北京:电子工业出版社,2013.
Simulation and analysis of the mobility of small agricultural tracked vehicles
GUO Kaiwen1, 2, LI Junzheng1, SUN Chaoran1, SUN Songlin1, TANG Weiguo1
(1.College of Mechanical and Electrical Engineering, Hunan Agricultural University, Changsha, Hunan 410128, China; 2.Hunan Defense Industry Polytechnic, Xiangtan, Hunan 411207,China)
In order to improve the adaptability of small agricultural tracked vehicles in the complex environment of southern hilly and mountainous areas, the mobility in typical agricultural terrains of the small agricultural tracked vehicle was simulated and analyzed. The kinematics laws of agricultural tracked vehicles were obtained through the 3D software Creo and multi-body dynamics software Recurdyn. The simulation was carried out for the agricultural tracked vehicle running straight on flat ground with two kinds of road surfaces (hard and soft), and ditch crossing performance of three trench widths (400mm, 700mm, 900mm), and obstacle crossing performance of three obstacle heights (150mm, 260mm, 380mm), and climbing performance of three slopes (10°, 20°, 30°). The kinematic laws of agricultural tracked vehicles are obtained, which provides a reference for further optimizing the structure of agricultural tracked vehicles.
tracked vehicle; mobility; simulation and analysis; obstacle crossing performance
S229
A
2096–8736(2020)03–0007–05
湖南省重点研发项目(2018NK2061);湖南省自然科学基金(2020JJ5239)。
郭凯文(1989—),男,研究方向为车辆检测与运用。
李军政,男,副教授,研究方向为农业地面作业装备与控制。
猜你喜欢
当代陕西(2021年13期)2021-08-06
兵器装备工程学报(2021年3期)2021-04-09
党的生活(黑龙江)(2020年10期)2020-12-18
农民致富之友(2020年14期)2020-05-25
当代工人(2020年1期)2020-05-11
创新作文(1-2年级)(2017年11期)2018-04-17
坦克装甲车辆(2000年6期)2000-06-13
父母必读(1999年3期)1999-06-07
祝您健康(1985年3期)1985-12-30
