基于BOOST电路的电磁阀流量控制器设计与试验
2020-03-09 07:36黄忠裕
农业机械学报 2020年2期
沈 跃 黄忠裕 刘 慧
(江苏大学电气信息工程学院, 镇江 212013)
0 引言
随着人们保护环境和节约资源意识的提高,精准施药技术得到越来越多的推广和应用[1-3]。其中,脉冲宽度调制(Pulse width modulation,PWM)变量喷药是精准喷雾过程中的一种重要控制方式,诸多学者对此进行了研究[4-7]。尽管PWM变量喷雾技术有良好的流量调节特性,但由于电磁阀的磁滞现象和阀芯机械惯性,造成了PWM对电磁阀进行控制时存在死区[8-9]。
为了提高电磁阀的动态响应特性,蒋焕煜等[10]使用响应面法对改进型脉冲宽度调制控制参数进行优化,有效缩短了电磁阀响应时间,但试验电路使用传统的单电压驱动电路;LIU等[11]设计了一种多通道变量喷雾数字流量控制器,提高了电磁阀的使用寿命,喷雾流量控制精度高,但适用的线性范围只能达到控制周期的10%~90%;刘浩等[12]设计了一种宽电压输出的驱动电路,通过多级自适应电压激励驱动策略,减少了阀芯的开启、关闭时间,但是需要额外的电源变换电路,降低了能量使用效率。
本文在前人的研究基础上,利用电磁阀的电感特性[13],设计基于BOOST电路的电磁阀流量控制器。采用双电压驱动的电磁阀,无需电源电压转换电路,能更精确宽范围地控制多个独立喷嘴的流量。
1 电磁阀特性和BOOST电路原理
1.1 电磁阀工作原理
变量喷雾使用的电磁阀为常闭状态,为了使电磁阀正常打开,电磁线圈流过的电流需产生足够强度的磁场,使电磁阀上的动铁和定铁吸合[14]。图1是电磁阀常闭和打开结构示意图。

图1 电磁阀结构示意图
1.2 响应时间的理论分析
由于常闭电磁阀阀芯在动作过程中受到电磁惯性和机械惯性[15-16],造成了电磁阀的响应延时。在电磁阀动作过程中,阀芯主要受到电磁力、液压力、弹簧力、阻尼力的作用[17]。为了缩短电磁阀的开启响应时间,需要在阀芯动作时提供较大的电磁力。忽略电磁阀动作过程中电感的变化,可得电磁力方程为
(1)
式中Fm——电磁力,N
L——电磁线圈电感,H
i——电磁线圈流过的电流,A
N——线圈匝数
Ae——电磁作用面积,m2
μo——空气磁导率,H/m
由式(1)可知,在电磁阀结构参数不变的情况下,电磁力取决于电磁阀线圈电流。再由电感的伏安特性可知,提高电磁阀的输入电压可以增大电磁线圈的电流,从而缩短电磁阀的响应时间。
1.3 BOOST电路工作原理
BOOST电路拓扑结构如图2所示,BOOST是一种开关直流升压电路,它可以使输出电压比输入电压高[18-19]。BOOST电路采用恒频控制方式,占空比可调。如图2所示,MOSFET管Q导通时电感L充电,并开始储能,二极管D防止电容对地放电;管Q关断时,电感L存储的能量通过二极管D给电容C充电,电容两端电压升高,且高于输入电压,升压完毕。

图2 BOOST电路拓扑结构
本文利用电磁线圈的电感特性和阀体保持阶段高频的PWM信号对输出电容进行升压,并将存储在电容中的高电位电压用于电磁阀的打开阶段,加速电磁阀导通。
2 控制器设计及参数确定
2.1 总体设计
为了降低电磁阀工作的死区,改进了喷嘴流量和占空比的线性区间,设计了一款多喷嘴输出的电磁阀流量控制器,结构示意图如图3所示。流量控制器由1个单片机、2个基于I2C总线控制的PWM信号发生器和电磁阀驱动电路组成,输入电压为12V DC。流量控制器通过RS-485总线连接上位机,并基于Modbus通信协议接收上位机的控制指令。
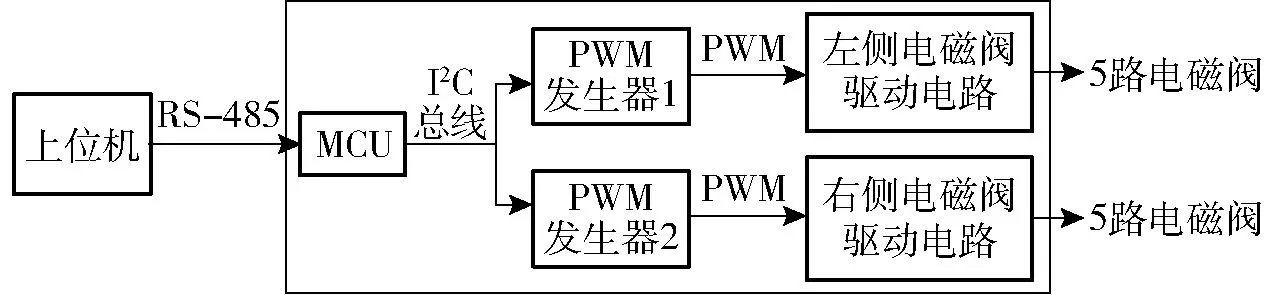
图3 电磁阀流量控制器结构示意图
2.2 电磁阀驱动电路设计

图4 电磁阀驱动电路原理图
设计了基于BOOST电路的电磁阀驱动电路,如图4所示。它由图腾柱驱动电路、BOOST电路和高电位电磁阀驱动电路组成。R5、Q4和Q5组成的图腾柱驱动电路,如图4中绿色标号器件。二极管D1、电磁阀电磁线圈L1、保险丝F1、MOSFET管Q1、肖特基二极管D3、瞬态抑制二极管TVS和电解电容C1组成BOOST电路,如图4中红色标号器件。MOSFET管Q2、二极管D2、电磁阀电磁线圈L1、保险丝F1和MOSFET管Q1组成高电位电磁阀驱动电路。图4中,PWM1端口输入的信号控制MOSFET管Q1,PWM2端口输入的信号控制MOSFET管Q2。

图5 电磁阀流量控制器电路板
PWM信号发生器由2个PCA9685PW和外围电路组成。在IAR for STM8开发平台下,用C语言编写单片机STM8S005K6T的程序。单片机通过I2C总线向PCA9685PW发送控制指令,使每片PCA9685PW输出10路占空比可调的PWM信号,电路板如图5所示。
2.3 参数选择
本文使用的电磁阀为美国TeeJet公司生产的DS55295-12型电磁阀,该电磁阀参数如表1所示。
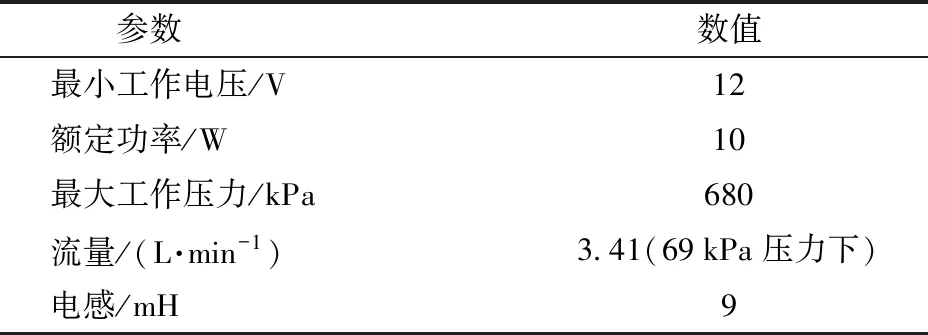
表1 DS55295-12型电磁阀参数
如图4所示,在电容C1升压过程中,为了防止电磁线圈L1产生的反电动势超出电容C1的耐压值和MOSFET管Q1的漏源电压,在电容C1端并联单向瞬态抑制二极管TVS,将电压箝位到24V DC。经测试,电磁阀在24V DC下导通5 ms,可有效打开。电容C1所需要的容值计算式为
QL=Ptc
(2)
(3)
式中QL——电磁阀吸收能量,J
P——电磁阀功率,W
tc——Q2和Q1导通时间,s
Qc——电容C1释放的能量,J
C1——电容容值,F
Uh——高电位电压,24 V
Ul——低电位电压,12 V
根据能量守恒定律,可知QL等于Qc,代入数值得到C1为231.5 μF。为了减少电容电压的衰减,取计算容值的2~3倍为电容C1容值,因此选择耐压值为35 V,电容值为680 μF的电解电容。
3 模糊控制策略
3.1 电磁阀驱动电路的工作模式
电磁阀依次工作在加速导通、维持导通和关闭模式。
加速导通模式:高电位电磁阀驱动电路工作,控制Q2和Q1导通,电容C1存储的高电位的24V DC通过MOSFET管Q2和二极管D2流过电磁阀的电磁线圈L1,电磁阀打开,如图6a所示。相比较于12V DC,24V DC驱动的电磁阀能更快地达到峰值电流,提高了开阀响应速度。
维持导通模式:BOOST电路工作,Q2始终关闭,Q1工作在高频通断状态。此时电磁阀电感线圈L1中维持的电流足够保持电磁阀导通。在Q1导通时,输入12V DC通过二极管D1流过电磁阀的电磁线圈L1,电磁阀线圈L1开始储能,并维持电磁阀导通,如图6b所示。Q1关闭时,由于电磁线圈L1的电感特性,电流不能突变,存储在电磁线圈L1的能量通过二极管D3流向电容C1,电容C1电压升高到瞬态抑制二极管TVS击穿电位24V DC,如图6c所示。如表1所示,电磁阀电磁线圈电感为9 mH,电磁线圈储能较强,为了减少电磁阀在高频状态下对电路的干扰,设定BOOST电路在维持导通模式下的工作频率为1 kHz。
关闭模式:BOOST电路、高电位电磁阀驱动电路都停止工作,Q2和Q1关闭,电磁线圈L1中的能量通过二极管D3和瞬态抑制二极管TVS迅速释放到地端,电磁阀关闭,如图6d所示。

图6 电磁阀工作状态
3.2 维持导通占空比的模糊控制

图7 不同占空比下的电磁阀状态
由于电磁阀的电磁特性,造成了电磁阀的回滞现象[20]。在电磁阀维持导通模式下,设置MOSFET管Q1的占空比为0~100%,每10%步进,测试不同占空比状态下电磁阀的开关状态,如图7所示。测得电磁阀的关闭阈值为20%占空比,导通阈值为70%占空比。同时,为了保证BOOST电路能为电容C1充电,设定高频模式下控制周期的20%为死区时间。最终,设定维持导通模式下的占空比在20%~80%区间内。本文通过模糊控制算法设置维持打开占空比工作在合适的值,保证了储能电容能为加速打开模式提供足够的电能。
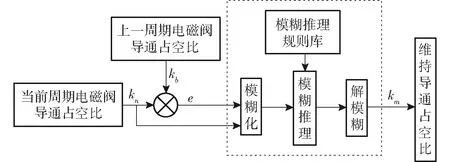
图8 维持打开占空比模糊控制结构图
模糊控制是把精确的数值转换为模糊集合中的元素,再经过模糊推理得到模糊化的输出变量,最后对输出变量进行解模糊,输出精确的控制量[21-22]。如图8所示,模糊控制器的输入为当前周期与上一周期电磁阀导通占空比的差值以及当前周期电磁阀导通占空比,经过模糊推论,输出维持导通占空比。
当前周期电磁阀打开占空比kn,模糊语言值为{ZO(零)、PS(正小)、PM(正中)、PB(正大)},变化范围为[0,100],论域为{0,30,60,90,100};当前周期与上一周期电磁阀导通占空比的差值e,模糊语言值为{NB(负大)、NS(负小)、ZO(零)、PS(正小)、PB(正大)},变化范围为[-30,30],论域为{-30,-10,0,10,30};输出维持导通占空比km模糊语言值为{S(小)、M(中)、B(大)、VB(极大)},变化范围为[20,80],论域为{20,40,60,80},输入输出的隶属函数为对称三角形函数。根据试验操作经验可知,当前周期电磁阀导通占空比kn较小时,输出维持导通占空比km应设置较大值,为储能电容提供足够的电能;当前周期与上一周期电磁阀导通占空比的差值e较大或者较小时,储能电容中存储的电量将受到影响。模糊推理规则采用IF-THEN语句,维持导通占空比设定值的推理规则如表2所示。运用Matlab软件的FIS编辑器对模糊控制进行仿真得到模糊规则曲面,如图9所示。

表2 模糊控制规则

图9 输入、输出变量关系曲面
3.3 软件设计
当前,成熟的变量喷雾电磁阀驱动策略主要为单电压普通PWM模式激励。但这种驱动方式的电磁阀开启响应时间相较于双电压驱动方式较长。本文在电磁阀由关闭到打开阶段,设置电磁阀工作在加速导通模式;电磁阀有效打开后设置电磁阀工作在维持导通模式,维持导通工作频率为1 kHz,通过模糊控制算法选择维持导通占空比km;在电磁阀由打开到关闭过程阶段,设置电磁阀工作在关闭模式。电磁阀的控制周期为100 ms,有效打开时间为5 ms,电磁阀控制流程图如图10所示。图11为传统和改进PWM控制方法波形图,占空比均为60%。图11中1阶段为加速导通模式,2阶段为维持导通模式,3阶段为关闭模式,其中2阶段维持导通占空比为44%。

图10 电磁阀控制流程图

图11 传统和改进PWM控制方法波形图
4 试验平台与方法
4.1 电磁阀流量采集试验平台
试验平台如图12所示,主要包括人机控制部分、恒压控制部分和变量喷雾部分。其中人机控制部分主要由计算机、USB转串口和串口转485模块组成;恒压控制部分主要由药箱、隔膜泵(DP-70型,上海新西山实业实业有限公司)、压力传感器(WMB2012-HS型,烨立工控)和隔膜泵控制器组成;变量喷雾部分由电磁阀驱动器、电磁阀和喷头(XR8001VS型,美国TeeJet公司)组成,喷头适用压力范围为100~400 kPa。量杯用于收集电磁阀喷洒的药液。喷头喷雾角为80°,量杯杯口距离喷嘴1.5 cm,喷头垂直于量杯,防止喷出的药液落入量杯之外。

图12 流量采集试验平台
4.2 流量获取
在电磁阀喷雾过程中,需要对压力进行闭环控制,保证采集流量数据的准确性。计算机将期望的压力发送到隔膜泵控制器,隔膜泵控制器检测压力传感器的压力信号,通过PID控制算法,实现输出压力的恒定。设定喷雾时间为60 s,喷雾结束后读取量杯中液体的体积,计算流量。
4.3 试验设计
为了研究传统方式[11]和本文方法的电磁阀流量和占空比之间的线性关系,测试XR8001型喷嘴在110、180、250、320、390 kPa压力下的流量,试验占空比依次为3%、4%、6%、8%、10%、20%、30%、40%、50%、60%、70%、80%、90%、92%、94%、96%、97%,占空比小于3%电磁阀不能打开,流量为0,大于97%电磁阀不能有效关闭,输出流量停止变化。每组试验重复5次,求取平均值和标准差,如表3所示。选取采集数据中每组最大流量数据和XR8001型喷嘴手册中的连续喷雾流量数据对比,在100、150、200、250、300、400 kPa压力下,对应的手册流量为0.23、0.28、0.32、0.36、0.39、0.45 L/min。不同压力下手册数据和试验的最大流量数据相对误差小于5%,说明采集的试验数据可靠。

表3 传统方式和本文方式采集的流量
4.4 结果与讨论
传统模式在前4种压力试验下,占空比3%~8%对应采集的流量为0,在压力390 kPa试验下,占空比3%~6%对应采集的流量为0,说明电磁阀并没有打开,为了保证数据拟合的有效性,只对非零数据区间进行线性拟合;同理,改进模式也只对非零数据区间进行拟合,并计算决定系数和适用区间,处理结果如表4所示。拟合线性方程为
Q=aDc+b
(4)
式中Q——喷嘴流量,L/min
a、b——标定常数
Dc——PWM占空比,%
由表4可知,随着压力的增大,传统方式和本文方式线性回归方程的决定系数均有所增加。传统方式喷雾压力为110、180、250、320、390 kPa时,决定系数为0.994 6、0.995 8、0.996 2、0.996 3、0.996 7,同样,改进方式决定系数为0.995 4、0.996 3、0.996 9、0.997 2、0.997 3。此外,同一喷雾压力下,改进方式的决定系数比传统方式的决定系数略高。改进模式占空比适用范围得到了提高,在110、180、250、320、390 kPa压力下,PWM线性区间分别从10%~92%、10%~92%、10%~92%、10%~92%、8%~92%提高至4%~92%、4%~94%、4%~94%、4%~94%、3%~94%。电磁阀流量和占空比适用区间的增加提高了农药利用率,尤其在占空比(0,10%)区间内,改进方式药液使用量分别是传统方式的86.85%、92.09%、83.15%、85.57%、86.54%。在压力250 kPa下根据拟合的线性回归方程进行变量喷雾,为了确保靶标上有足够的药液沉积,传统方法输出流量对应占空比低于10%的均设为10%,对应占空比大于92%的均改为100%,而改进方法输出流量对应占空比低于4%的设为4%,对应占空比大于94%的设为100%。因此,在压力250 kPa下,传统方式输出流量对应占空比在(0,10%)区间,输出流量均为0.957 L/min,而改进方式输出流量对应占空比在(0,4%)区间输出流量均为0.074 L/min,占空比在[4%,10%)区间对应输出流量线性区间为[0.074,0.092 6) L/min,对占空比在(0,10%)区间的流量进行面积分析,发现改进方式药液使用量是传统方式的83.15%。

表4 改进前后数据处理
5 结论
(1)设计了一款应用于农业变量喷雾领域的电磁阀流量控制器,利用电磁阀的电感特性,将BOOST电路和传统的电磁阀驱动电路相结合,实现了电磁阀的双电压供电。使用改进型PWM控制方式,在电磁阀打开时接入高电压,维持阶段使用高频PWM控制,并为储能电容充电,通过瞬态抑制二极管迅速释放电流,使电磁阀快速关闭。
(2)使用XR8001型喷头,通过搭建的试验平台,测试了110、180、250、320、390 kPa压力下改进前后的占空比和流量,并进行了线性拟合,结果表明,流量对应占空比的线性区间分别从10%~92%、10%~92%、10%~92%、10%~92%、8%~92%提高到了4%~92%、4%~94%、4%~94%、4%~94%、3%~94%。更宽范围的线性区间提高了药液使用率,尤其是占空比在(0,10%)区间内,改进方式药液使用量是传统方式的86.85%、92.09%、83.15%、85.57%、86.54%。
猜你喜欢
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
莆田学院学报(2021年5期)2021-11-13
防爆电机(2021年3期)2021-07-21
电子制作(2019年19期)2019-11-23
汽车与驾驶维修(维修版)(2019年3期)2019-05-08
速读·下旬(2019年3期)2019-04-11
科学与财富(2017年27期)2017-10-17
知识就是力量(2016年6期)2016-05-31
汽车电器(2014年2期)2014-12-02