
共轴刚性直升机前飞状态气动配平与性能分析
2020-03-17 01:54张永华赵旭周平徐跃宇林永峰
航空科学技术 2020年2期
张永华,赵旭,周平,徐跃宇,林永峰
1.西北工业大学,陕西西安710072
2.中国直升机设计研究所,江西景德镇333001
共轴刚性旋翼直升机采用转向相反的上下旋翼,空气动力对称,机身结构紧凑,提高了直升机的速度和机动性,是武装直升机的重要发展方向。
美国先后研制了XH-59A、X2 和S-97 直升机,但仅有XH-59A 的数据公开且较为完整。例如,其风洞悬停和前飞试验[1,2]以及全机飞行试验[3],试验状态中都包含了全部机身。图1 为XH-59A 直升机。刚性旋翼上下各三个桨叶,半径为5.4846m。机身两侧配有涡喷发动机作为辅助动力。旋翼主发动机功率为1102.5kW,两个涡喷发动机可提供13350N的总推力。旋翼由NACA系列翼型组成,非线性扭转角-10°,根切位置位于0.1R处,实度0.1267,详见参考文献[4]。
共轴刚性旋翼因上下旋翼间距小、控制变量多带来流动复杂、性能相互干扰的问题。周国仪等[5]将单旋翼一级谐波形式Pitt/Peters静态非均匀入流模型推广到共轴旋翼,得到了诱导速度的时空分布。袁野等[6]也采用该模型,考虑挥舞和变距运动,完成了XH-59A直升机纯直升机状态的配平特性,验证了飞行试验。本文也采用此入流模型。

图1 XH-59A直升机Fig.1 XH-59A helicopter
针对控制参数多,配平困难的问题,Lyu and Xu[7]简化了约束和控制量个数,采用一阶泰勒展开,计算目标量和操纵量之间的雅可比(Jacobi)矩阵,使用自由尾迹法,完成了仿X2 直升机的迭代配平。其约束5 个(推力、阻力和三个方向的力矩),操纵量5 个(上旋翼总距、横向周期变距、纵向周期变距、下旋翼总距及推进螺旋桨总距)。并且在相同前进比下,找到了多组不同配置的解。影响此方法效率的主要因素是初始值和计算精度。陈全龙等[8]指出该类直升机配平变量多于方程数(控制量9个、约束6个),采用优化方法,其目标函数可根据实际需要选择配平变化量、前飞效率或升力偏置量。此外,旋翼转速是影响直升机飞行性能的一个重要因素。将转速作为旋翼的一个操纵量,具有降低耗油和功率的作用。有关旋翼转速对飞行性能研究见参考文献[9]、参考文献[10]。共轴刚性旋翼在叶尖Ma数达到0.75后,也会降低转速。为了简化,本文研究刚性旋翼定转速前飞。针对XH-59A 直升机,采用计算流体力学(CFD)方法获得了操纵量的变化,验证飞行试验数据。本文采用的控制量7个、约束6个,鉴于上述文献,采用梯度优化算法实现配平。
1 共轴刚性直升机气动力模型
直升机气动力模型包括旋翼、机身、平尾三部分,因垂尾阻力较小,忽略其影响。
鉴于XH-59A 直升机的风洞试验数据详细[1,2],旋翼形状[2]和工况参数完备,机身气动特性矩阵[2]真实可靠,飞机三视图精确,因此根据试验建立直升机气动力模型。
Phelps 和Mineck[1]对1∶5.131 缩比的XH-59A 直升机进行了风洞试验,测量了悬停和前飞性能。前进比为0~0.31。旋翼叶尖切线速度为88m/s,低于设计转速。因试验是在飞机的力和力矩达到配平条件下完成的,测量的旋翼及直升机整体的力和力矩可作为标模验证计算结果。
Felker[2]对全尺寸XH-59A直升机进行了风洞试验,测量前飞性能。旋翼叶尖切线速度为180~207m/s,接近设计转速。旋翼工作时前进比为0.25~0.45,桨盘倾角为0°~10°。因试验没有进行力和力矩配平,不同于常规前飞桨盘倾角为负值,因此试验数据不考虑。但其去掉旋翼的机身试验提供了机身气动特性,该试验是在来流速度33~93m/s、桨盘倾角-10°~10°状态下完成的,接近真实前飞状态,机身气动特性具有通用性。
1.1 旋翼气动力模型
1.1.1 基本假设
在低前进比下,刚性旋翼的挥舞可以忽略。本文忽略旋翼挥舞和摆振,考虑周期变距,假设旋翼是刚性运动,翼型气动力采用准定常线性假设,忽略桨尖损失和失速效应,忽略旋翼和直升机的气动干扰,旋翼的力和力矩是采用周期平均值。
1.1.2 入流模型
前飞状态,上下旋翼桨盘处诱导速度采用基于非定常激励盘理论的Pitt/Peters静态入流模型[11],并考虑上下旋翼相互干扰,引入干扰因子,作为附加的诱导速度叠加到上下桨盘中。干扰因子是经验系数,与上下旋翼的间距和直升机飞行状态有关。本文基于欧飞[12]对某共轴直升机飞行数据拟合获得的干扰因子,将前进比μ为0.275部分光滑延伸至0.4,如图2所示。

图2 共轴旋翼干扰因子与前进比关系Fig.2 Interaction factor vs advance ratio
无量纲速度采用小写字母,均以叶尖线速度(ΩR)为基准,上下旋翼的无量纲诱导速度viu和vil见式(1)、式(2):

式中:v0u为无量纲上旋翼平均诱导速度,x为无量纲桨叶截面位置(=r/R),vcu为上旋翼诱导速度一阶余弦谐波,δu为上旋翼对下旋翼的干扰因子,ψu为上旋翼方位角,vsu为上旋翼诱导速度一阶正弦谐波。v0l为下旋翼平均诱导速度,vcl为下旋翼诱导速度一阶余弦谐波,δl为下旋翼对上旋翼的干扰因子,ψl为下旋翼方位角,vsl为下旋翼诱导速度一阶正弦谐波。
将上下旋翼的平均诱导速度v0、诱导速度一阶正弦vc和余弦谐波vs分别代入到入流方程中,见式(3)。获得该旋翼的推力系数CT,滚转力矩系数Cl和俯仰力矩系数Cm[11]:

矩阵L详见参考文献[11]中式13(b),可由旋翼入流比、前进比和平均诱导速度v0等确定。
将上下旋翼的推力、滚转和俯仰力矩系数叠加起来,再转化对应的力和力矩,就完成了旋翼气动力的计算。
1.1.3 旋翼变距运动与气动力分析
考虑共轴刚性旋翼的周期变距,上下旋翼桨距分别为式(4)和式(5):

式中:θ为共轴旋翼0.7R处总距,θp为差动总距,A1为纵向周期变距,A1p为差动纵向周期变距,B1为横向周期变距,B1p为差动横向周期变距。方位角定义为沿桨叶旋转方向增大,故而相同的ψu与ψl在空间的位置不同。
根据叶素动量理论,将旋翼截面的相对速度分解为切向速度UT、径向速度UR和法向速度UP,见式(6)~式(8):

式中:ψ为方位角,V为飞行速度,r为某截面翼型距转轴的半径,α为桨尖平面与来流方向夹角,β为桨叶预锥角。诱导速度Vi是有量纲平均诱导速度,其无量纲速度(vi= Vi/ΩR)通过动量理论,采用式(9)迭代完成,再转化为有量纲结果。

式中:CT为桨盘推力系数,λ0=μsinα。将vi的迭代结果作为式(3)中的v0初值,进而求出矩阵L的初值。再将式(1)、式(2)代入到式(3)中,通过式(3)迭代求解v0、vc和vs。这样,入流模型就整合到气动计算中。
考虑桨叶迎角α为桨距θ与入流角φ之差,而入流角近似为法向速度与切向速度之比,见式(10),将式(4)、式(5)中的对应桨距代入式(10),就可以将周期变距包括在气动计算之中:

根据二维翼型升阻力特性获得为叶素在旋转平面的切向力和径向力沿方位角的变化,沿圆周积分后,获得旋翼旋转一圈的平均气动特性,代入式(3)中,迭代求解诱导速度,最终获得拉力、功率等性能,详见参考文献[13]。其中翼型气动特性采用CFD计算,确保翼型在失速和反流工况下的性能准确性。
1.2 机身模型
机身气动力计算需要精确的外形参数且计算复杂。本文根据Felker风洞试验获得的XH-59A机身的气动特性矩阵计算气动力特性,详见参考文献[2]中表3。
1.3 平尾模型
根据参考文献[14]中式(3-38)计算平尾升力LHT与阻力DHT,即式(11)~式(15):

式中:CLHT为升力系数,SHT为平尾面积。V为前飞速度,αHT为平尾升力系数斜率,依照参考文献[15]中附录B的直升机样机,平尾升力系数斜率取值3.2rad-1。α为平尾迎角,iHT为平尾安装角,ηHT为平尾展弦比。εHT是旋翼对平尾的下洗角,根据参考文献[16]中式(6-22),即本文式(16)求解出的无量纲特性诱导速度vi,将上文中求出的旋翼推力系数代入式(16),得到vi,再转化为有量纲平均诱导速度Vi,代入式(17)获得下洗角。

测绘XH-59A直升机三视图[1],获得平尾展弦比ηHT=4。依照参考文献[17]测绘出的全尺寸XH-59A飞机的平尾面积,代入式(11)~式(17)可以得到平尾升力LHT和阻力DHT。
再根据测绘出的平尾质心到直升机重心的纵向距离xHT和垂直向上距离yHT,代入到式(18)求出平尾对直升机重心的俯仰力矩Mz,HT,而平尾对直升滚转和偏航力矩为零。

在3.1节中,验证缩比试验,因此,将对应面积和距离按照1∶1.513缩比。而在3.2节,验证飞行试验,参数将选择全尺寸飞机测绘数据[17]。
考虑垂尾的阻力较小,对直升机俯仰力矩影响可以忽略,本文计算中忽略垂尾的气动力和力矩,将以上三部分的气动力和力矩叠加起来,获得直升机整体气动特性。
2 共轴刚性旋翼飞行器配平
2.1 配平过程
直升机在匀速平飞时,受到的外力与力矩为零。其气动的性能研究只有在平衡条件下才有价值。XH-59A飞行试验仅提供了直升机性能,而无控制参数的数据。因此,本文建立快速配平策略,借助上节中的性能计算,通过迭代等方法完成飞行力学平衡和飞机性能预估,预测试验参数。
本文主要考虑旋翼配平。通过调节控制参数(共轴旋翼总距θ,差动总距θp,横纵向周期距B1、A1,差动周期距B1p、A1p,桨盘倾角α共计7个),见式(19),使旋翼的载荷(桨盘阻力FX、侧力FY、推力FZ、滚转力矩MX,俯仰力矩MY和偏航力矩MZ共6个)达到特定的值,见式(20),从而稳定直升机的姿态和航向。具体约束为阻力最小、侧力为零,推力的垂直分量平衡直升机重力,其他三个力矩为零:

设“F*”作为配平值,配平问题转为求解方程(21):

考虑到控制参数比约束多一个,采用梯度下降优化法求解优化问题(式(22)和式(23)),编制MATLAB程序完成计算,设置收敛标准为残差小于1×10-5,详见参考文献[13]。

梯度优化方法收敛速度快,局部优化效率高,当初始值接近精确值时收敛速度比较快。考虑到本文需要验证有配平解的试验值,因此有初值供参考,故选用该法。其步骤为:(1)计算当前点梯度信息gk和搜索方向pk;(2)计算沿当前搜索方向的步长αk,使得f(xk+αkpk)<f(xk);(3)更新设计变量xk+1=xk+αkpk,验证是否收敛。本文选择BFGS 拟牛顿方法来加快收敛速度,其基本原理来源于牛顿法[13]。
2.2 配平案例
以前进比0.2的全尺寸直升机模型为例[18],控制参数初值X0为[10°,0°,0°,0°,0°,0°,0°],根据上述搜索方向和步长迭代46步收敛,在处理器为I3-4160、内存为8G的台式机上运行,耗时约0.5h。最终结果为x=[8.97°,0.14°,-1.22°,5.94°,-0.47°,0.21°,-2.13°]。得到的残差随迭代次数变化如图3所示,控制参数随迭代次数变化如图4所示。

图3 残差随迭代次数变化Fig 3 Residual variation with iteration
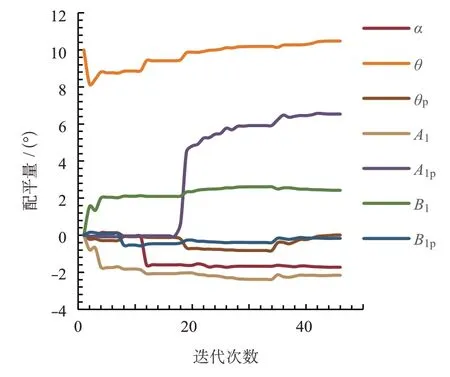
图4 控制参数随迭代次数变化过程Fig 4 Control variables variation with iteration
3 直升机前飞性能的验证
为了评估直升机气动力模型的可靠性,先采用风洞试验的结果验证第1 节中气动特性预测的准确性。然后,针对直升机飞行试验,使用配平策略,在第1节、第2节的基础上,预测纯直升机状态下前飞时的控制参数变化。
图3和图4显示,控制变量和残差在收敛过程会经历数个平台段,表明目标函数梯度在个别区域较为平缓,收敛慢,但该配平方法整体收敛速度是理想的。
3.1 验证风洞试验
Phelps 和Mineck[1]采用风洞试验测量了XH-59A 直升机缩比模型悬停和前飞性能。旋翼叶尖切线速度为88m/s。本文选用前进比为0.31的前飞试验Run78,辅助动力未开。该工况的具体参数为:直升机俯仰迎角-8.1°,侧滑角0°,差动总距-0.6°,旋翼纵向周期变距-8.5°,横向周期变距0.3°。改变总距,测量旋翼推力系数CT、直升机水平方向力系数CH、侧力系数CY、滚转力矩系数CMX、俯仰力矩系数CMy、偏航力矩系数CMZ。参考文献[17]中表2给出了真实尺寸XH-59A 直升机的质心坐标,位于旋翼轴线,距离下旋翼轴心0.89m 位置。根据缩比模型,求出风洞模型质心位置位于下旋翼轴心偏下0.1735m。
采用第1 节中直升机气动模型,预测的结果与试验对比如图5~图10所示。
图5 显示预测的旋翼推力系数约为试验值的88%~101%,随总矩增加而增加且误差降低。总距在12°~13°时,预测值略小于试验。因为旋翼模型基于叶素动量理论,忽略机身干扰。理论模型不能计算旋翼翼型所有流动工况下的气动特性,而是通过有限个雷诺数和马赫数下二维翼型定常流动CFD模型获得升阻力系数,没有计算的工况按线性插值获得气动特性,因此没有试验结果准确。在小总距下,旋翼推力小,翼型相对迎角小,机身干扰较大,因此理论模型误差略大。

图5 旋翼推力系数随总距变化Fig.5 Rotor CT-θ curves

图6 直升机水平方向力系数随总距变化Fig.6 Helicopter CH-θ curves

图7 直升机侧力系数随总距变化Fig.7 Helicopter CY-θ curves

图8 直升机滚转力矩系数随总距变化Fig.8 Helicopter CMx-θ curves

图9 直升机俯仰力矩系数随总距变化Fig.9 Helicopter CMy-θ curves

图10 直升机偏航力矩系数随总距变化Fig.10 Helicopter CMZ-θ curves
图6表明计算的直升机水平方向力系数约为试验值的87%~95%。水平方向力包括旋翼阻力在水平方向的分量,计算未考虑起落架、桨毂等产生的阻力在水平方向的分量,而导致预测略微偏小。
图7表示计算的侧力系数为试验值73%~132%,侧力相比于拉力和纵向力小得多,因此模型的计算结果是合理的。
图8 显示计算获得的滚转力矩系数非常小,约为-6×10-5,与试验获得的零力矩非常接近。
图9表明计算的俯仰力矩系数为试验值的46%~151%。计算得到的力矩系数不随总距变化,而试验值随总距增大而增大。在总距为13.5°时,二者更接近。俯仰力矩系数的差异与旋翼、机身、平尾相互干扰,以及机身和平尾气动模型的简化相关,平尾的测绘面积与实际面积之间的差异对结果也有影响。试验中,俯仰力矩系数随总距增大,但计算值恒定,原因是计算中忽略旋翼和机身的流动干扰。总距增大导致旋翼推力增大,下洗气流增大。由于力矩参考点位于桨轴所在直线,距离上旋翼桨毂向下0.2804m处(接近直升机质心),旋翼拉力改变对俯仰力矩无影响。但总距增大导致下洗气流增大,机身相对迎角减小,机身升力减小。由于稳定性要求,飞机的气动中心都位于质心之后,因此,升力减小使得对质心的低头力矩减小,所以俯仰力矩系数略微增加。而计算采用机身气动特性数据是通过去掉旋翼的风洞试验获得的,俯仰力矩系数仅与飞机俯仰角和动压有关,忽略了旋翼对机身的流动干扰。
图10 显示计算的偏航力矩系数很小,约-0.0024,而试验值为零。原因是旋翼滑流对机身的影响没有考虑。
由此可见,除图5外的其他图基于全机的特性,预测值与试验值的偏差比图5略大。这是因为试验是对飞机整体开展的,包括了旋翼、机身和尾翼的流动干扰,起落架、桨毂等具体部件的影响均考虑在内。而气动模型建立在旋翼、机身、尾翼的孤立的性能计算基础上,并通过叠加获得整体特性,流动的相互干扰以及起落架等部件均不考虑。
综上,本文采用气动力模型预测的旋翼推力系数、飞机纵向力系数准确度高,飞机俯仰力矩系数误差略大,飞机侧力和滚转力矩、偏航力矩系数都在理想范围内。
3.2 飞行试验验证
采用参考文献[18]中的XH-59A直升机的飞行试验数据,控制参数来源于参考文献[6]提供的飞行数据。前飞速度10~88m/s,直升机的重量(质量)为5700kg。本文仅考虑前飞速度小于79m/s 的情况,即前进比为0~0.4。对应叶尖马赫数Ma小于0.75,旋翼转速恒定为36.1rad/s,旋翼叶尖切线速度198m/s,辅助推力不打开。此范围对应旋翼最大雷诺数为5×106。
通过配平计算获得该直升机在纯直升机状态下前飞时的控制参数的变化,大约48次迭代收敛,将旋翼桨盘倾角、总距、差动总距、纵向周期变距与横向周期变距与试验对比,如图11~图15 所示。图中,因计算获得的工况点分散,为了显示其变化趋势,采用了多项式曲线拟合了离散点,而飞行试验和参考文献[6]的计算结果为离散点。
图11中的桨盘倾角即飞机俯仰角,因为刚性旋翼轴不倾斜而二者相同。可见,随前进比增加,直升机更加低头,倾角量值增加,计算结果略高于试验值。在前进比较大时,倾角计算误差增大,参考文献[6]更接近试验值。

图11 桨盘倾角随前进比变化Fig.11 Rotor α-μ curves
图12显示总距随前进比变化趋势与试验相同,参考文献[6]更接近试验值。在前进比μ<0.3 时,总距计算值较于试验值略高。而前进比μ>0.3 时,计算值与试验值非常接近,总距的计算误差在25%左右。分析原因是在前进比较低时,机身和旋翼的干扰较为强烈,所以叶素理论不能很好地预测其影响,当前进比逐渐增大时,计算值接近试验值。

图12 总距随前进比变化Fig.12 Rotor θ-μ curves
图13 表明差动总距随前进比增大而增大。接近悬停时,上旋翼总距比下旋翼小1°。在前进比0.02~0.28 区间内,二者差值逐渐减小到0°。而当前进比进一步增加,上旋翼总距逐渐大于下旋翼,在μ=0.4时差值达到1°。差值的变化与上下旋翼的相互干扰密不可分,又与桨盘倾角变化相互联系。在前进比0.02~0.28区间,计算的桨盘倾角由0°降低为-3°,变化值小。可以近似认为气流平行于桨盘方向,对旋翼气动影响小。而上下旋翼的气动干扰主要受到前进比影响,前进比增大,干扰减小。而在前进比0.28~0.4 区间,计算的桨盘倾角由-3°降低到-5°,导致气流垂直于桨盘的分量和上下旋翼气动干扰增强。可见,前进比增加导致一方面桨盘倾角减小,另一方面在相同桨盘倾角情况时,上下旋翼流动干扰减小,这种双重作用导致上旋翼总距在较大前进比下略微大于下旋翼。虽然图11 中计算的桨盘倾角与飞行试验在较大前进比下差异略大,但图13中差动总距的计算值和飞行试验[18]趋势相符,比参考文献[6]更接近试验值。

图13 差动总距随前进比变化Fig.13 Rotor θp-μ curves
图14显示纵向周期变距值计算值与试验值略有差异,但基本变化趋势相同,而参考文献[6]更接近试验。
图15 表明计算的差动横向周期变距保持在一个不超过1°的范围,随前进比增加而略有增加,与飞行试验趋势略有不同,因数值很小,二者接近。因为前飞状态没有其他滚转力矩的来源,故而桨盘本身的滚转力矩系数也较小,参考文献[6]未提供此数据。

图14 纵向周期变距随前进比变化Fig.14 Rotor A1-μ curves

图15 差动横向周期变距随前进比变化Fig.15 Rotor B1p-μ curves
可见,采用本文直升机气动模型和配平策略获得的旋翼操纵参数变化基本与飞行试验吻合,由于没有考虑旋翼挥舞和提前操纵角,相对误差略大于参考文献[6]。但本文控制参数包括了上下旋翼各自周期距,不同于参考文献[6]中假设上下旋翼周期距相同,接近飞行试验控制参数。本文获得的桨盘倾角、纵向周期变距和差动横向周期变距误差随前进比增大而增大,表明挥舞运动在高前进比情况下的影响显著。
4 结论
本文采用叶素动量理论,考虑旋翼相互干扰,结合机身和平尾气动特性,预测的共轴刚性旋翼与直升机气动特性,经风洞试验验证,旋翼推力系数误差小于12%,直升机纵向力系数误差小于13%,直升机俯仰力矩系数、侧力和滚转力矩、偏航力矩系数都在理想范围内。
本文建立的共轴刚性旋翼直升机快速配平策略,包含了桨盘倾角共7个操纵量和6个约束,采用梯度优化算法完成了旋翼在0~0.4 前进比下的匀速前飞的气动力配平和性能预估。经飞行试验对比,控制参数的变化趋势相同,桨盘倾角、总距、纵向周期变距最大相差6°,差动总距最大相差1°,横向差动距最大相差2.4°,因飞行试验与预测模型本身的差异,结果是较理想的。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年6期)2021-07-20
军民两用技术与产品(2021年9期)2021-03-09
学习周报·教与学(2020年25期)2020-10-21
电子制作(2019年9期)2019-05-30
数学学习与研究(2019年5期)2019-05-08
劳动保护(2018年5期)2018-06-05
理科考试研究·高中(2017年7期)2017-11-04
百科探秘·航空航天(2017年4期)2017-07-10
