
机器人驾驶车辆的横向自适应反演切换控制*
2020-03-18 04:51苏树华
汽车工程 2020年1期
苏树华,陈 刚
(南京理工大学机械工程学院,南京 210094)
前言
驾驶机器人是实现车辆无人驾驶的新思路,是能安装到驾驶室代替人类驾驶员在危险和恶劣的情况下进行车辆自动驾驶的工业机器人[1-3]。机器人驾驶车辆与普通自动驾驶车辆相比,其最大的优点在于无须对车辆内部结构进行任何改装,驾驶机器人就能安装到驾驶室,实现车辆的自动驾驶,并且一台驾驶机器人能适用于多种类型车辆。目前国外主要有德国、美国、日本等国家拥有该项技术。国内掌握该项技术的主要有东南大学、南京理工大学、南京汽车研究所和中国汽车技术研究中心等高校和研究机构[4-6]。
作为实现无人驾驶的一种新途径,有必要对机器人驾驶车辆的车速和转向控制进行研究。针对机器人驾驶车辆提出了几种控制方法。Chen等[1]提出一种基于模糊逻辑理论的分层协调控制方法,以实现各种工况下行驶试验周期的协调控制和精确速度跟踪。张为公等[7]对驾驶机器人多层控制模型进行研究,并分析了自学习和自补偿算法、车速预瞄跟踪控制方法的基本思想,提高汽车排放试验的精度。Chen等[8]提出了汽车驾驶机器人多滑模车速跟踪控制,实现了对给定驾驶工况车速的跟踪。除了机器人驾驶车辆速度控制之外,转向控制也非常重要。王纪伟等[9]提出了一种基于模糊免疫PID的机器人驾驶车辆路径和速度跟踪控制方法,并针对其转向机械手设计了一种转向控制器,但在存在不确定性干扰的情况下,跟踪路径稳定性与精度较差。
在车辆横向运动控制方法方面,赵熙俊等[10]提出了一种由期望航向偏差生成器和反馈控制组成的智能车辆路径跟踪横向控制系统,但控制器自适应性较弱,输出动态响应超调量过大。汪伟等[11]将模糊控制理论引入汽车操纵逆动力学中,根据横向偏差及其变化率设计了车辆路径跟踪模糊控制器,但其控制精度不高,鲁棒性不强。李逃昌等[12]提出了一种基于模糊自适应纯追踪模型的农业机械路径跟踪方法,结合机械运动学模型来确定车轮期望转向角,但路径跟踪过程易振荡,路径跟踪响应稍显慢。郭景华等[13]建立了智能车辆横向运动控制模型,考虑车辆横向运动状态,建立了横向模糊控制器,但其控制精度不高,自适应性能较差。汪选要等[14]考虑到智能车辆在不同工况下表现出不同的系统特性,设计了遵循模糊控制律的横向切换控制器,但动态控制性能较差。Cayero[15]和 Amir[16]等采用基于Lyapunov函数的自适应反演方法设计了反馈线性化的替代方法,但闭环系统的稳定性不强。
常规的反演控制方法为控制子系统分别设计Lyapunov函数和虚拟控制量,直到完成整个系统控制律的设计,使控制系统逐渐趋于稳定。因此在进行车辆路径跟踪试验过程中,存在不确定性干扰时,反演控制器可稳定跟踪路径,鲁棒性强。但反演控制器瞬态响应超调量过大,且控制车辆跟踪路径过程中回归稳态时间较长。其中反演法定义的虚拟控制量本质上是一种静态补偿思想,不具备在线整定参数的功能。自适应控制法建立于模糊控制的基础上,是具有自适应学习算法的模糊逻辑算法,其学习算法依靠数据信息来实时调整控制系统的自适应律,自适应律与模糊隶属函数构造模糊系统逼近虚拟控制量。因此将反演法与自适应控制结合,可使参数实时整定,提高控制器自适应性。在路径跟踪过程中,加入横向状态切换器,可提高控制器控制精度。模糊自适应反演切换控制方法提高了模型的自适应性和控制精度,自适应反演法与Lyapunov型自适应律结合使用,可使整个闭环系统满足期望的动静态性能指标。
基于以上分析,本文中提出了机器人驾驶车辆横向自适应反演切换控制方法。建立了车辆纵横向动力学模型和转向机械手的动力学模型,设计了驾驶机器人的转向机械手模糊自适应反演控制器,建立了转向机械手状态切换器,并证明了控制系统的稳定性。仿真和试验结果验证了提出方法的有效性。
1 系统结构
驾驶机器人结构如图1所示,主要由转向机械手、换挡机械手、制动机械腿和油门与离合器机械腿组成,在无离合器踏板的自动挡车中,对离合器机械腿不采取控制。换挡机械手既能完成手动挡车的换挡任务,也能完成自动挡车的挡位变换。转向机械手由电机、减速机、万向节和转向盘抓手组成,对驾驶机器人施行转向控制。伺服电机作为驱动装置驱动转向盘。
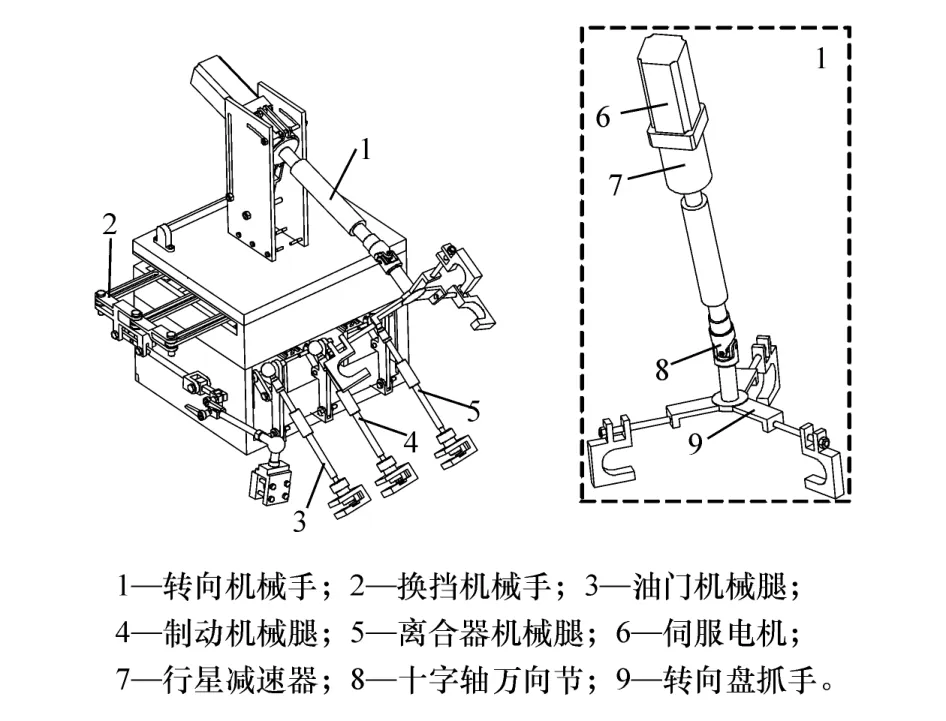
图1 驾驶机器人结构
2 机器人驾驶车辆的建模
2.1 车辆7自由度动力学模型
整车的受力分析如图2所示,xoy为车辆坐标系,x为以车辆自身为参考系的纵坐标,y为以车辆自身为参考系的横坐标,车辆的动力特性影响的因素主要有车辆纵向运动、横向运动和车辆横摆运动3个自由度。在此基础上,加上4个车轮的转动的自由度,确定了7自由度的车辆动力学模型。
纵向平衡方程:

图2 车辆7自由度动力学模型分析图

横向平衡方程:

绕整车z轴力矩平衡方程:

式中:m为整车质量;γ为横摆角速度;vx为纵向速度;vy为横向速度;Fxi、Fyi为车轮纵向力与横向力,i=fl,fr,rl,rr;h为整车质心高度;Iz为整车横摆转动惯量;a,b为质心到前后轮轴的水平距离;tf、tr为前、后轴的轮距。
分别对各个车轮轴建立相应的力矩平衡方程,可得如下平衡表达式:

式中:Iw为轮胎的转动惯量;Rw为轮胎半径;Tdi为各个轮胎的驱动力矩;Tbi为各个轮胎的制动力矩。
车辆各轮胎垂向载荷为

各轮胎侧偏角为

式中:αi为轮胎侧偏角;δi为轮胎偏转角。
Dugoff轮胎模型为

式中:Si为轮胎滑移率,i=1,2,3,4;Fxi,Fyi分别为轮胎横向力和纵向力,i=fl,fr,rl,rr;Cα,Cs为轮胎横纵向侧偏刚度;λ为轮胎力的一个计算当量参数。λ的取值和函数f(λ)的计算如下:

式中:μ为路面摩擦因数;εr为路面附着缩减系数;ui为纵向车速。
各车轮轮心在车轮坐标系下的纵向速度为
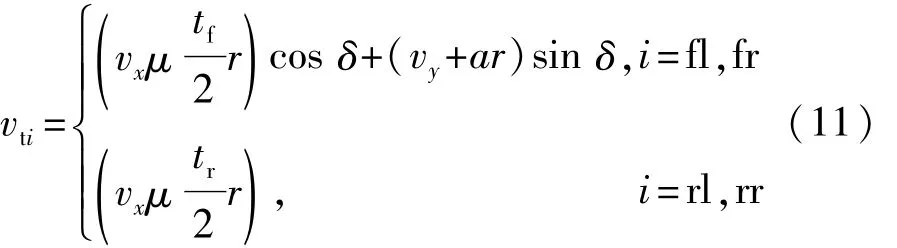
式中:vti为轮心纵向速度;r为轮胎半径。
2.2 转向机械手动力学模型
转向机械手运动简图如图3所示,电机输出的动力经过行星减速器的减速增矩作用,传递至十字轴万向节,最后再传递到转向盘上,起到转向的作用。

图3 转向机械手运动简图
转向机械手是单自由度的系统,设该自由度为角度θ,电机输出端转矩为T1,输出端负载转矩为T2,则根据动量矩定理,有

根据折算前后系统储存动能不变的原则,等效转动惯量具有的动能为

于是

式中:ωi为机构中第i个构件的角速度;vsi为其质心的速度,这里 vsi=0。
则电机输出轴的负载等效转动惯量为

式中:in1(n=2,3,4)为转向机械手各构件转速与电机输出端转速的速比;J1为太阳轮转动惯量;J2为行星轮转动惯量;J3为调节杆转动惯量;J4为转向盘抓手转动惯量。
定义电动机动力学方程为

式中:J为转向机械手等效至电机输出轴端的转动惯量;D为转动机械手等电动机输出轴端黏性摩擦因数;θ为电机转动角度;I为电枢绕组电流;Ua为电动机电枢输入电压;L为电枢绕组电感;Ra为电枢绕组电阻;Kb为电动机反电动势系数;KT为电动机转矩系数。
则转向机械手的动力学模型为
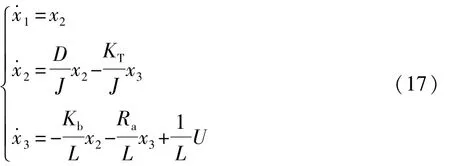
式中:x1为电机旋转角度θ;x2为旋转角速度θ·;x3为电枢绕组的电流i。
3 控制方法
机器人驾驶车辆的横向自适应反演切换控制系统框图如图4所示,主要由操纵车辆模型、驾驶机器人转向机械手模型、模糊自适应反演控制器、状态切换器模型和路径曲率计算模型组成。其中,状态切换器模型输入为路径曲率ρ、车辆轴距B和路径横向偏差Δd,输出为理想转角 δ。控制系统输入为Δδ、隶属度函数xi、机械手角度x1与角速度x2和电机电枢电流x3,通过设计模糊自适应反演控制器自适应律θ,将对应的自适应律输入模糊自适应反演控制器控制律模块,产生对应的控制器控制律,直到完成整个控制器控制律ut,模糊自适应反演控制器输出对应的电机电压U,转向机械手模型输出转向盘转动角度δm和所受力矩T,最终作用于车辆模型,该车辆模型输出实际坐标点,并将自身所受干扰传递给转向机械手,用于验证控制系统的稳定性能。
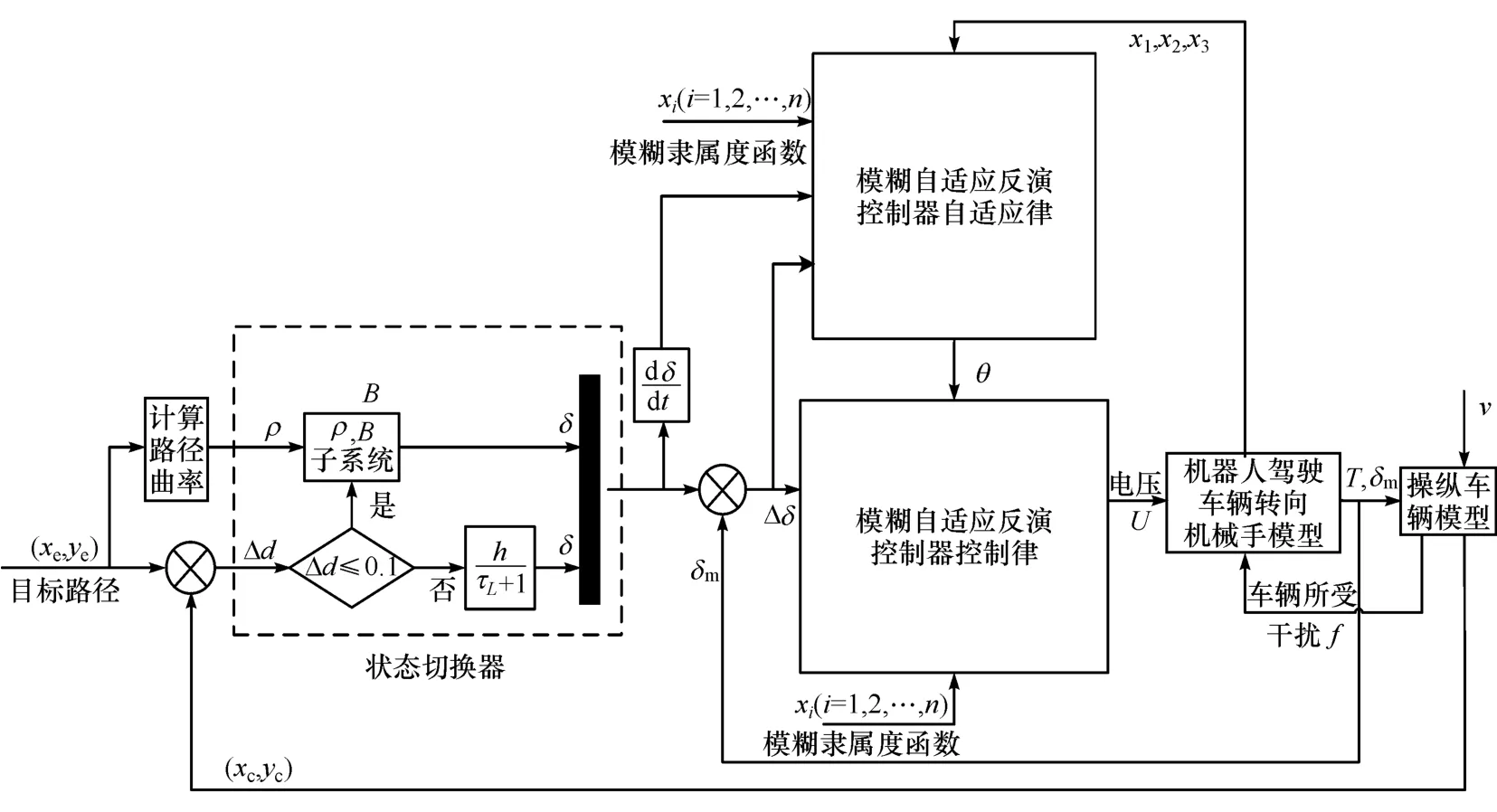
图4 机器人驾驶车辆横向自适应反演切换控制系统框图
3.1 理想转向角度
车辆转向过程中车轮偏转角度δ随时间t的变化如图5所示,车辆在转弯过程中分为转向轮的偏转、保持和回正3个阶段,与图中的0-t1、t1-t2和t2-t33段相对应。

图5 车辆转向过程中车轮偏转角度状态
当车辆行驶在目标路径时,其转弯半径R和车轮偏转角δ满足Aeklman几何关系:

式中:B为车辆轴距;ρ为车辆运动路径曲率。
当车辆偏离目标路径时,车辆路径跟踪运动如图6所示,定义一条包含平缓曲线、可近似为直线的目标路径,车辆沿着目标路径行驶,其中X轴是车辆沿着目标路径的方向,Y轴是与其垂直的方向,由于路径近似平缓,则|β|<<1,假定车辆在前视点处的横向偏移量为

式中:y为车辆横向位移;β为车辆横摆角;L为预瞄距离;yOL为目标路径在前视点处的横向偏移量。则横向偏移量与前轮转向角的传递函数为

式中:h为比例因子;τL为延迟时间。

图6 车辆路径跟踪运动
3.2 模糊自适应反演控制器虚拟控制量
控制器设计过程是通过逐步构造中间量ei=xiαi-1完成的,其中αi是第i步的虚拟控制量,最后的虚拟控制量αn是施加于系统反演控制律ut的一部分。
被控对象为
设δd为期望的角度,且δd具有2阶导数,定义误差为

α1是x2的虚拟控制量,定义误差:

为使e2趋近于0,则使α1趋近于x2,则令

引入虚拟控制量α2,定义误差:

为使e3趋近于0,则使α2趋近x3,则令

3.3 模糊自适应反演控制器自适应律
对变量 xi(i=1,2,3),定义 3个模糊集 Flii(li=1,2,3)。采用 27条模糊规则来构造模糊系统 f^(x|θf),则模糊系统的模糊逼近函数为
式中μli(xi)Fi为xi的隶属度函数。
引入向量 ξ(x),式(27)变为

采用 φk=ξT(x-)θ逼近未知函数,存在最优逼近向量,对于给定的任意小的常量 εk>0,
则自适应律为

其中各个变量xi对应的隶属度函数为

3.4 模糊自适应反演控制器控制律
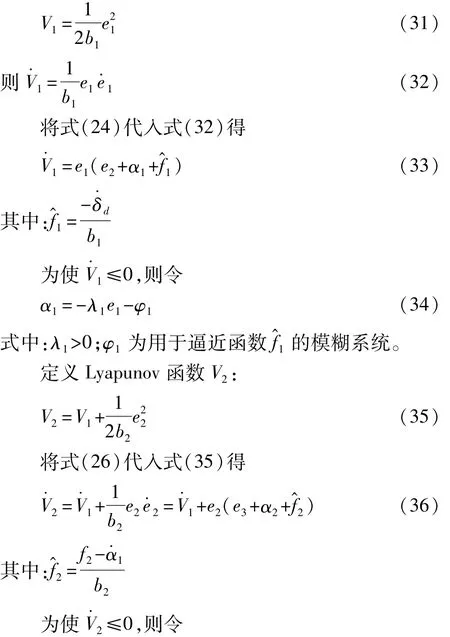
定义Lyapunov函数V1:

式中:λ2>0;φ2为用于逼近未知函数2的模糊系统。
定义Lyapunov函数V3:

由式(25)可知:


3.5 状态切换器设计
车辆在按预定路径行驶的过程中,自身会处于两种状态,一种是在预定路径上行驶,另外一种是偏离预定路径。在这两种状态下转向盘的转角计算方法不同,因此设计状态切换器使这两种状态能平滑过渡。
当车辆行驶在预定路径时,车辆自身轴距、路径曲率半径和车轮偏转角度可由式(18)得出,其中路径曲率半径为

式中y′和y″由预定路径离散点的横纵坐标的数值微分得出。
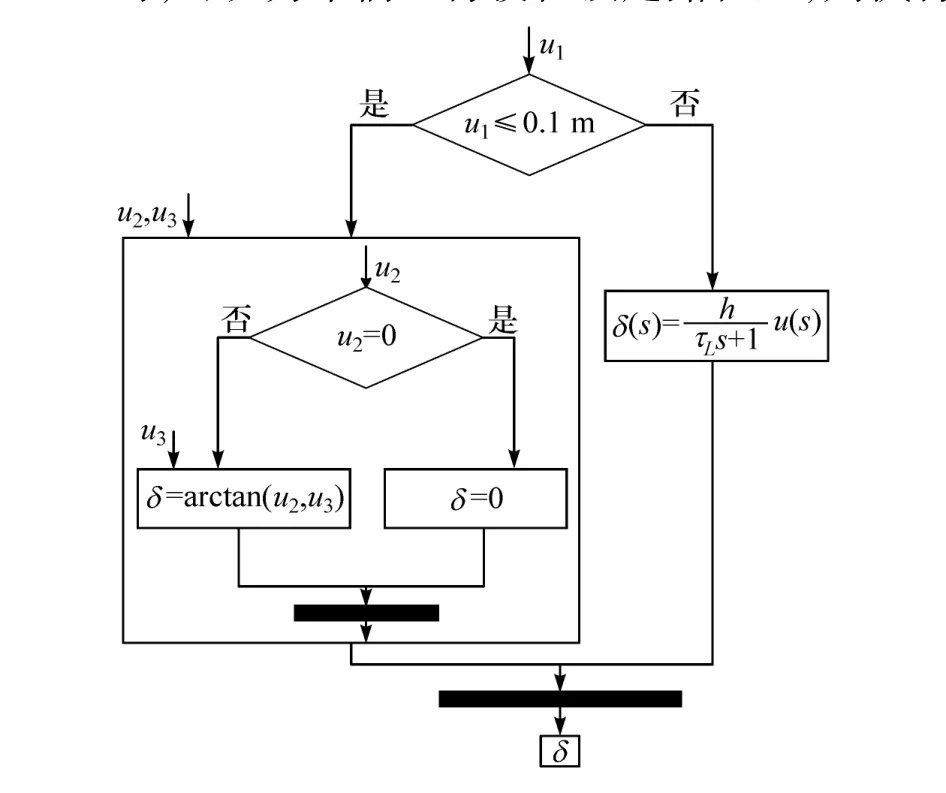
图7 状态切换器模块框图
状态切换器模块框图如图7所示,模块输入u1为车辆与预定路径的横向偏差,当偏差小于或等于0.1 m时,可认为车辆已行驶在预定路径上,则执行由u2和u3组成的模块,u2为路径曲率,u3为车辆轴距,当模块的输入u2等于0时,表明车辆在直线路径上行驶,则此时转向盘转角δ为0,否则就由式(18)推导求出δ;若模块输入u1大于0.1 m时,表明车辆目前偏离预定路径,则执行由式(20)求出δ,再综合输出期望的转向盘转角δ。
4 仿真与试验验证
为验证提出的方法在转向控制中的有效性,将驾驶机器人安装于试验车上(见图8),进行了机器人驾驶车辆跟踪双移线仿真和人类驾驶车辆的双移线试验(采用某型桑塔纳轿车在交通部公路交通试验场进行)。其中,机器人驾驶车辆及其机械手和控制器的主要参数如表1所示。

图8 驾驶机器人安装图
为验证所提出方法的自适应性,分别进行了45、50、55和60 km/h的4种车速下的双移线仿真对比,跟踪同一双移线路径的转向盘转角变化。双移线路径有4个拐角,即有4个转弯点,每个转弯点转向盘转角都要经历转动、保持和回正3种状态。仿真结果如图9所示。由图可见,4种车速下转向盘转角基本符合跟踪双移线路径过程中的转弯变化规律,每个波峰与波谷都代表了车辆的转弯过程,且每一次转弯过程基本符合所述的3种状态。随着速度的增加,转向盘转角会随之减小,表明控制器为适应不同车速,在保证路径跟踪精度情况下,会适当减小转向盘转角转动时间;随着速度的增加,在跟踪路径直线行驶阶段,也即转向盘转角为零的阶段也会随之减小。
为验证所提出方法的稳定性,进行了50 km/h车速下的双移线曲线路径跟踪仿真,且在路径曲线X=50 m处加入横向位移为1 m的干扰量,仿真结果如图10所示。由图可见,t=3.8~4 s时转向盘转角产生约0.01 rad的变化量,该变化是为了克服车辆在X=50 m发生的横向偏移所产生的,t=4 s之后转向盘角度逐渐趋近未受干扰时的变化曲线,但仍然存在些许误差。相应的作用也使转向盘的力矩在t=3.8~4 s产生了突变,输出稳定的转动角度。其作用在转向盘上产生相应的转角,在t=4 s之后,力矩反向是为了转向盘转角回到未受干扰时的状态。

表1 主要性能参数
为验证本文提出方法的有效性,采用模糊PID控制方法、PID控制方法和本文提出控制方法,在50 km/h的车速下进行机器人驾驶车辆双移线跟踪控制性能对比仿真和人类驾驶车辆的试验验证,如图11所示。
由图可见,人类驾驶员得到的试验误差较大,最大可达0.45 m,在车辆行驶过程中,驾驶员会预判路面状况,在第1与第2个转弯点处,在人类驾驶员没有减速的情况下转向,因此人类驾驶员路径跟踪曲线就会超出理想路径。驾驶员容易受到驾驶经验、环境的影响,在第2与第3转弯处之间的直行阶段,跟踪效果较差,但人类驾驶员具有路径规划和决策能力,在一定程度上克服了外界干扰,在第3与第4转弯处,路径跟踪效果明显提高。
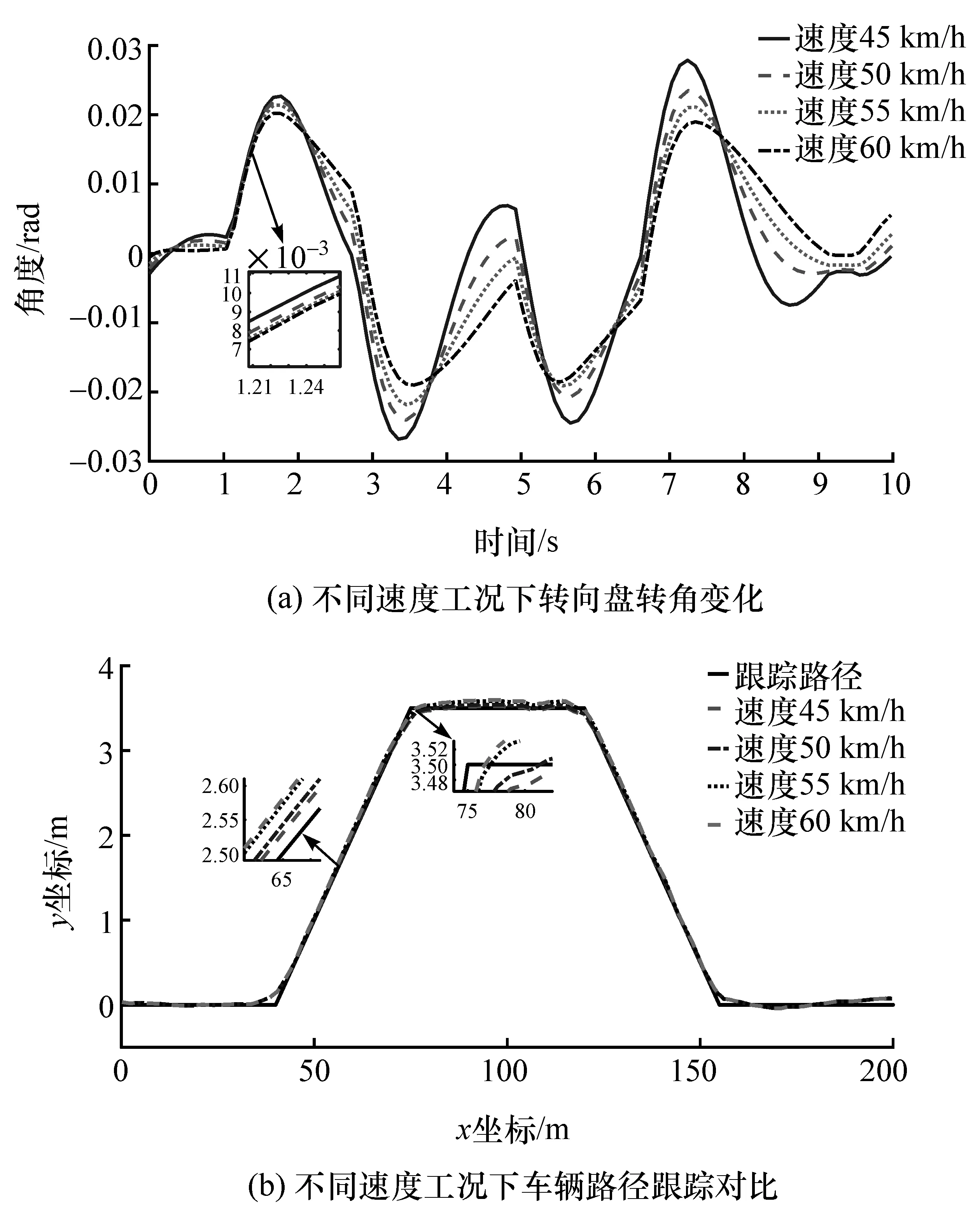
图9 不同速度工况下车辆跟踪响应仿真效果

图10 存在干扰时转向盘角度与所受力矩变化
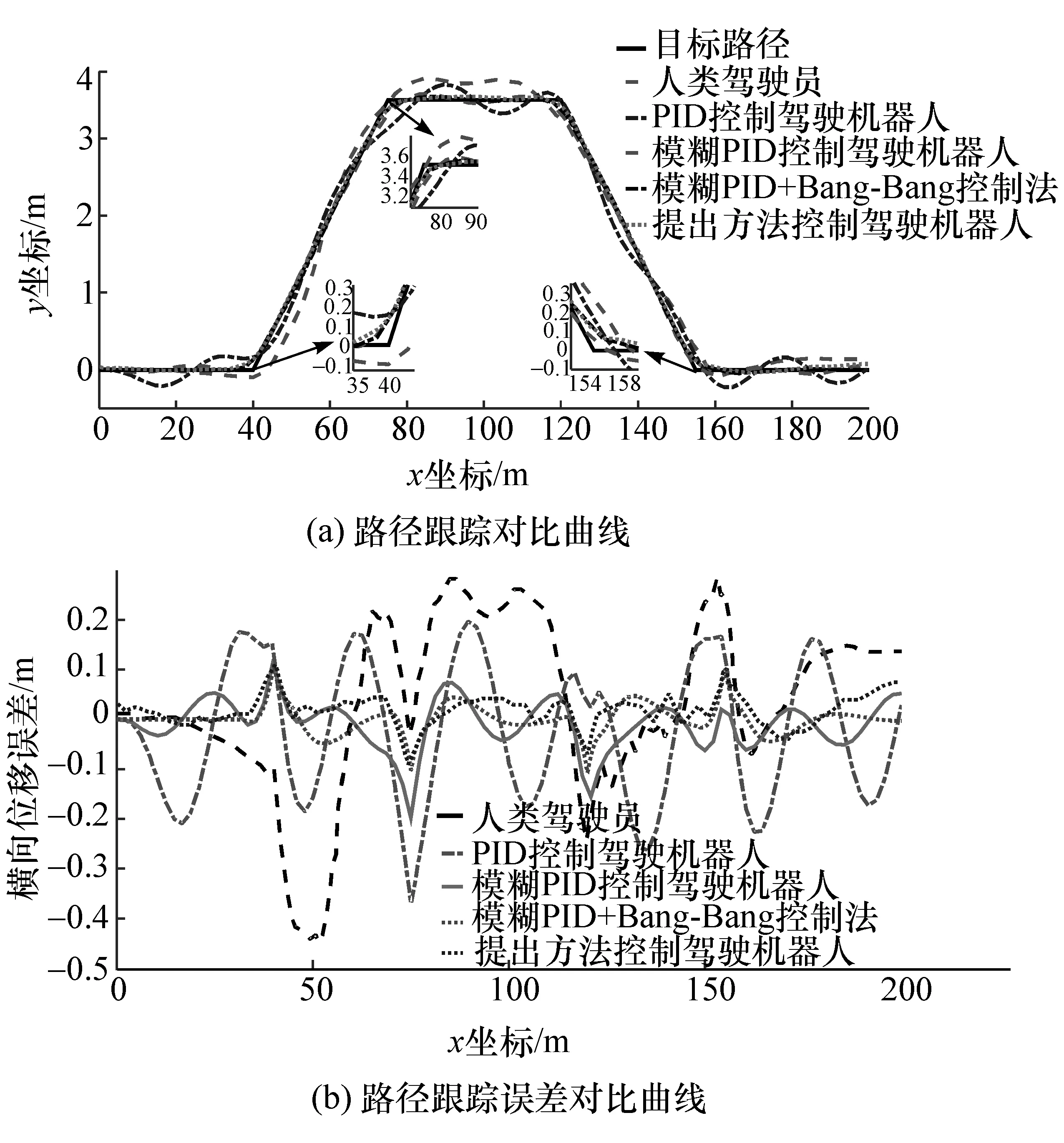
图11 双移线工况下路径跟踪对比曲线
另外,PID控制驾驶机器人控制车辆跟踪预定路径的过程中波动仍然很大,PID控制过程是将车辆路径横向误差不断地反馈回控制器,使得跟踪误差尽量小,由于其参数是离线调节,因此较难达到理想跟踪效果。PID控制驾驶机器人会根据横向跟踪误差大小,在临近转弯点时提前转向,因此路径跟踪曲线不会超出理想路径,其中路径跟踪误差上下波动幅度基本一致,但在第2个转弯处跟踪误差较大,表明该控制器瞬态响应时间过大,使得在第2个转弯处跟踪精度减小,且在直线行驶阶段控制器超调量过大,调整时间也增大,因此跟踪误差呈现出不断波动的状态。模糊PID控制器通过横向误差作为模糊输入,其中模糊PID控制器的参数可以在线调节,使得控制精度优于PID控制,在每个转弯处车辆路径跟踪误差均控制在±0.2 m以内,相较于PID控制大幅度减小。
图中同时示出文献[17]中采用PID+Bang-Bang控制法的结果。由图11(b)可以看出,本文提出方法的跟踪误差比模糊PID+Bang-Bang控制法小。总之,本文提出的方法能很好地完成路径跟踪任务,整体跟踪性能波动和路径跟踪误差均较小,在道路转弯处路径跟踪误差均在±0.1 m以内,满足性能要求。
5 结论
提出了驾驶机器人驾驶车辆横向自适应反演切换控制方法,建立了7自由度的车辆横纵向动力学模型,构建了无人驾驶机器人转向机械手动力学模型。在此基础上,定义了转向机械手每个子系统的虚拟控制量,接着定义了子系统的模糊隶属度函数,构造了模糊系统逼近器,并通过虚拟控制量与真实子系统状态值的偏差、模糊逼近函数以及模糊隶属函数,设计了模糊自适应反演控制器自适应律。接着为每个子系统分别定义了Lyapunov函数,通过虚拟控制量与真实子系统状态值的偏差、模糊逼近函数和模糊自适应反演控制器自适应律值,设计了模糊自适应反演控制器控制律。针对车辆是否行驶在预定路径,以路径跟踪横向偏差作为输入,建立了转向机械手状态切换器,并进行了仿真与试验验证。
在试验车辆的不同驾驶速度工况下,无人驾驶机器人能根据车辆速度快慢和在保证车辆路径跟踪精度情况下,车速较快时转角会减小,反之车速慢时转角会增大,验证了提出方法的自适应性。在试验车辆路径跟踪过程中存在横向干扰的情况下,且该干扰会增大路径跟踪的误差,设计的控制器则反向增大转向机械手转矩的变化,克服了试验车辆干扰带来的影响,验证了提出方法的稳定性。试验和仿真结果表明,本文方法能在模糊PID稳定跟踪控制的基础上,进一步将车辆跟踪误差减小到±0.1 m以内,满足路径跟踪试验要求。
后续将考虑无人驾驶机器人车辆轮胎和轮胎不确定性与不同路面之间的相互作用,并将该作用力反馈至转向机械手,再分析转向机械手控制器的变化规律。考虑车辆横向加速度、横摆角速度因素,保证误差满足要求的情况下,实现车辆稳定的路径跟踪控制。在性能分析方面,考虑无人驾驶机器人驱动电机负载波动对车辆转向以及车速控制的影响。
猜你喜欢
中等数学(2022年5期)2022-08-29
农机使用与维修(2022年7期)2022-07-14
机电工程技术(2021年3期)2021-09-10
环球时报(2019-07-18)2019-07-18
小资CHIC!ELEGANCE(2019年20期)2019-07-02
学校教育研究(2018年8期)2018-07-09
中国建筑金属结构(2018年4期)2018-05-23
现代职业教育·中职中专(2018年7期)2018-05-14
地震研究(2017年3期)2017-11-06
