
无人驾驶汽车编队雾天主动拯救系统*
2020-03-18 04:51边辰通殷国栋徐利伟
汽车工程 2020年1期
边辰通,殷国栋,徐利伟,张 宁,朱 侗
(东南大学机械工程学院,南京 211189)
前言
与一般天气环境相比,在雾天环境中常常由于较低的能见度带来较多的交通事故[1-3]。研究表明,在雾天环境中驾驶员往往对车速估计过低而且对前方车间距估计过高[4],这也是雾天部分驾驶员行驶车速过高的主要原因,此外驾驶员的反应时间也会由于能见度的降低而增加[4]。因此许多驾驶员常由于未能及时制动而与路中突然发现的障碍物发生碰撞事故。
现有研究主要通过两类措施来避免雾天交通事故的发生。第1种为通过动态交通信号标志提示安全车速来警示雾天中的驾驶员降低车速[3,5]。如果驾驶员能够看到这种提示信号并及时减速到安全车速,可避免雾天环境中大部分交通事故。第2种为现在广泛研究的汽车主动安全系统,目前已经提出了许多种驾驶员辅助系统来减少此类碰撞事故,主要包括防追尾系统[6-7]和自适应巡航系统[8-9]等。这些系统可主动介入到汽车行车控制中来减少碰撞事故。然而目前动态交通信号标志尚未大范围应用到公路交通中,且一些驾驶员也会无意中忽略这种交通标志。由于成本和个人偏好等因素,现在公路中还有大量汽车未能安装主动防碰撞系统,因此目前在雾天中还存在着相当多的交通碰撞风险。
随着汽车和网络技术的发展,具备智能化和网联化的无人驾驶汽车受到了广泛的关注。基于先进环境感知系统,特别是在黑暗和雾天中,无人驾驶汽车能比普通驾驶员更容易探测到各种移动和静止障碍物。此外,基于车联网通信技术,无人驾驶汽车可相互分享道路交通信息,多辆无人驾驶汽车可组成编队来提高交通效率和降低能量消耗[10-11]。通过车载雷达和通信设备,无人驾驶汽车编队有机会在雾天探测到有人驾驶汽车潜在的碰撞危险,有可能帮助有人驾驶汽车避免在雾天中的碰撞事故。为减少雾天碰撞交通事故的发生,为无人汽车编队设计了一种主动拯救系统。该系统的基本原理为:如果编队在雾天中检测到有人驾驶汽车前存在静态障碍物,而且由于该车车速过高有碰撞风险,则编队主动超越该车并在车前占用所有车道,然后通过主动减速来强制有人驾驶汽车降低车速。这样该车驾驶员能在发现前方障碍物之前降低到安全车速来避免碰撞事故。
本文中的主要贡献在于针对无人汽车编队设计了一个主动拯救系统来降低其他有人驾驶汽车在雾天的碰撞事故。现有汽车主动安全系统主要用于提高受控汽车的安全性。与现有研究相比,所设计的主动拯救系统是用于提高非受控有人驾驶汽车的安全性。在某种程度上,所设计的系统是用于拯救有人驾驶汽车中的驾驶员和乘客,因此该系统被称为主动拯救系统而非主动安全系统。
从人道主义角度考虑,十分有必要构建一个对人类友好的智能交通系统,在系统中每个没有生命的交通工具都应该能在有必要时主动救援有人驾驶汽车中的驾驶员和乘客。无人驾驶汽车受芯片和程序控制,能通过传感器和网络获取更多的交通环境信息。随着汽车技术的发展,交通系统中将会有越来越多的无人驾驶汽车。这些汽车不仅能探测到自身的事故风险,且可检测到其他有人驾驶汽车的潜在风险。因此很有必要研究无人驾驶汽车如何协助有人驾驶汽车避免潜在的交通事故,然而目前国内外针对该类问题的研究较少,尚须进一步发展完善。
1 雾天主动拯救工况说明
所讨论的雾天主动拯救问题如图1所示,其中主要包括一组含4辆汽车的无人驾驶汽车编队和1辆有人驾驶汽车。道路为双向8车道且路中存在隔离带,汽车无法穿过隔离带到对侧车道行驶。有人驾驶汽车前方由于交通事故存在静止障碍物。当对侧车道的无人驾驶汽车或道路监控设施探测到这些障碍物后,将障碍物信息发送到交通控制系统中心,控制中心通过车联网将障碍物信息发送给临近区域内装备车联网的汽车,当无人驾驶汽车编队进入该区域时可收到该障碍物信息。在雾天中有人驾驶汽车驾驶员未能观察到前方障碍物而且车速较高。受能见度限制,在该车速下驾驶员将无法在发现前方障碍物后及时制动停车。显然,如果编队忽略有人驾驶汽车存在的潜在碰撞事故,编队可在障碍物前直接减速停车。然而从人道角度考虑,编队应该主动帮助驾驶员而不是忽略驾驶员的安全风险。
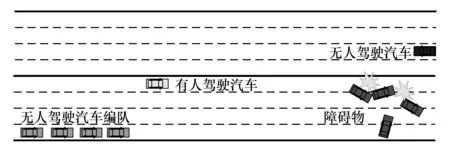
图1 无人编队在雾天拯救有人驾驶汽车
为便于研究讨论做以下假设:编队采用集中式控制系统,可直接规划和控制编队中每辆车的运动;编队可通过车载传感器探测到有人驾驶汽车的运动状态;编队可通过传感器或车联网通信获取能见度信息;编队中没有乘客;编队为匀质编队,即其中的每辆汽车有着相同的动力特性;编队中的汽车均装有自动驾驶系统且能跟踪规划的轨迹;有人驾驶汽车为未装驾驶员辅助系统和车联网通信的汽车。
2 系统基本工作原理
受雾天能见度较低的限制,驾驶员往往无法在看到障碍物后及时制动。在无法超车的情况下,驾驶员在发现前车减速时也会随之降低车速。因此可采用编队变换的形式占用有人驾驶汽车前的所有车道,再通过减速来迫使有人驾驶汽车提前减速来避免碰撞事故。基于上述考虑,设计的主动拯救系统采用如图2所示的4个阶段使有人驾驶汽车减速:第1阶段通过加速快速完成对有人驾驶汽车的超车;第2阶段通过换道来占用所有的车道;第3阶段通过纵向协调编队汽车形成横向队列来防止有人驾驶汽车超车;第4步通过减速迫使有人驾驶汽车在未发现前方障碍物时就能够提前减速,并在障碍物前实现完全制动。
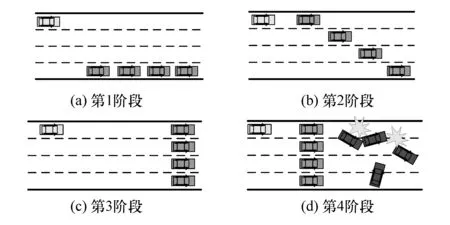
图2 算法基本原理
3 主动拯救系统
本章首先介绍了编队控制系统结构,然后给出了判断有人驾驶汽车碰撞风险的方法,最后设计了主动拯救系统在救援有人驾驶汽车所需4个阶段的编队轨迹规划方法。
3.1 编队控制系统结构
本研究针对于集中式编队控制系统,其结构如图3所示,图中汽车1-4表示编队中的4辆汽车。编队中汽车可通过车联网通信把交通环境和自身的运动状态信息发送到编队控制系统。编队控制系统可根据周围交通环境和编队中汽车运动状态做出决策并规划合适的轨迹,再通过车联网发送到每辆汽车控制系统中。编队中汽车通过自身自动驾驶系统来跟踪所规划的轨迹。一般而言,集中式编队控制系统可位于编队中任意一辆汽车中。
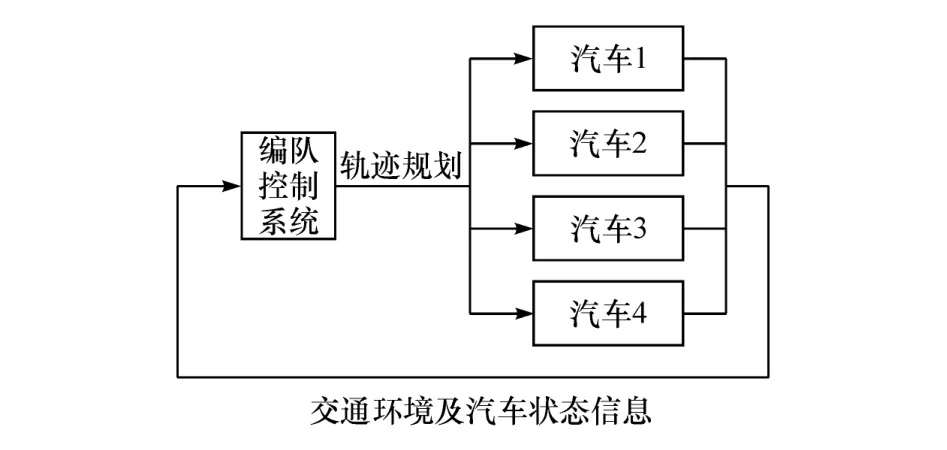
图3 编队控制系统结构
3.2 有人驾驶汽车碰撞风险检测
系统可通过比较实际能见距离和估计的有人驾驶汽车最小制动距离来判断有人驾驶汽车是否存在碰撞风险。如果估计的最小制动距离比实际能见距离更小,则有人驾驶汽车存在着一定的碰撞事故风险。有人驾驶汽车的最小制动距离可估计为

式中:vm为汽车的初始速度;tra为估计的驾驶员反应时间汽车的制动距离;am为估计的有人驾驶汽车最大制动减速度。由于无法准确获知该车的驾驶员反应时间和最大制动减速度,可采用较长的反应时间和较小的最大制动减速度来估计该车的最小制动距离。这种方法较为保守但更能保障有人驾驶汽车的安全性,可防止出现由于误判造成的未能在危险时救助车内人员。
3.3 轨迹规划
主动拯救系统的轨迹规划包含超车、换道、纵向调整及主动减速4个阶段。本节给出了在这4个阶段的轨迹规划方法。其中超车、纵向调整和主动减速3个阶段,汽车沿原车道保持直线行驶,因此只须为汽车规划其纵向位移的时间历程。
3.3.1 超车轨迹规划
“每个医生都拥有自己的数字证书和签章,可开具电子申请单和书写电子病历,各种信息都通过信息系统进行传递,并通过数字化病案管理系统实现了病案的电子化归档及管理,节省了工作时间,提高了工作效率。”
在本阶段中,编队需要超越有人驾驶汽车一段距离。主动拯救系统中的一个关键点是在有人驾驶汽车前形成一个横向编队,为防止有人驾驶汽车在编队变换过程中超越编队,一种简单办法是在超出驾驶员能见距离处进行编队变换。为减少编队变换所用的时间,采用如下过程来超越有人驾驶汽车:开始时编队以最大加速度加速到最高车速以超越有人驾驶汽车;当编队超越该车且距离超过可见距离后,以最大减速度制动以降低到有人驾驶汽车的速度。由于在该阶段中编队的速度始终高于有人驾驶汽车速度,因此在该阶段编队最后车辆和有人驾驶汽车的距离应超出驾驶员可见距离。
3.3.2 换道轨迹规划
在该阶段编队中的汽车须以相同的纵向速度换道以完全占用所有的车道。在换道过程中编队中汽车只改变横向相对位置,纵向间距不变,因此无须考虑编队汽车间的碰撞问题。可采用基于余弦的换道轨迹来规划编队中各辆汽车的换道轨迹:

式中:t为时间;x(t)和 y(t)分别为该车的纵向和横向轨迹;v为该车的纵向速度;lw为该车换道横向位移;ts为换道起始时间;xs和ys分别为该车换道起始纵向和横向位置;tlc为换道的时间长度。对于编队中的汽车可按照图2(a)及图2(b)中各车换道宽度,根据式(2)确定本车在该阶段的换道轨迹。
3.3.3 纵向调整
在该阶段,编队中汽车需要调整纵向位置以形成横向队列,由于不涉及换道,只须规划各车的纵向位移时间历程行驶。为简化问题,编队头车设置为匀速,其他汽车需要调整纵向相对位置以与头车形成横向队列。在该阶段结束时头车的纵向位置和速度为


式中pi为确定该车纵向运动的参数,i=1,2,3。对式(4)求导可得规划的速度:

将该车初始和结束位置及速度代入式(4)和式(5)可得

式中:ts和te分别为该阶段的开始和结束时间;vs和xs分别为汽车在开始时刻的速度和位置;ve和xe分别为汽车在该阶段结束时的速度和位置。在该阶段开始时间各车的速度和纵向位置为已知,在结束时各车的速度和纵向位置相同,因此对编队中头车后任一辆汽车,当 vs、xs、ve和 xe确定后,可代入式(6)解得pi,来确定该车的纵向位移时间历程。
3.3.4 主动减速
在本阶段编队须主动减速来迫使有人驾驶汽车减速,编队须在该阶段结束时停在障碍物前。在此阶段编队中汽车在各自车道内横向位置保持不变,由于采用横向队列的形式,因而各车的纵向位移时间历程相同。编队中汽车最终的纵向位置为

式中:xobs为障碍物位置;d0为编队到障碍物的最小距离。
为简化计算,采用匀减速运动来规划编队中汽车的纵向位移时间历程,在匀减速运动中加速度为常数且最终速度为零,编队中汽车在该阶段的平均速度为

式中va为汽车在该阶段的初始速度。该阶段的时间长度为

式中la=xb-xa为编队中汽车的制动距离,xa为该阶段开始时汽车的纵向位置。该阶段汽车的制动加速度为

在计算得到该阶段的加速度后,可得为编队中汽车规划的纵向位移时间历程:

式中ta为该阶段的初始时间。由于在该阶段编队中所有汽车保持横向队列,其纵向位移时间历程相同,因此皆可根据式(11)来规划各自的纵向位移时间历程。
4 仿真分析
为验证所设计主动拯救系统的有效性,设计了两组仿真以便对比。仿真采用Matlab软件,在华硕FX63VM型计算机上进行。采用常见驾驶员模型[12]控制有人驾驶汽车的纵向运动,驾驶员反应时间为1 s且能在发现障碍物后进行制动。驾驶员模型[12]为
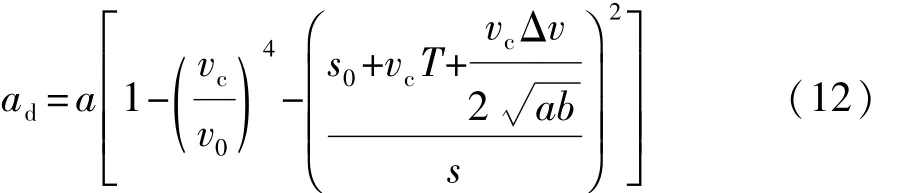
式中:ad为驾驶员控制汽车的加速度;a为最大加速度;v0为理想行驶速度;vc为自车行驶速度;s0为车车安全距离;T为车车安全时距;Δv为与前车的速度差;b为考虑制动舒适性的制动减速度;s为与前车的距离。
第1组仿真中编队未考虑救援有人驾驶汽车,第2组仿真中编队基于所设计的主动拯救系统来救援有人驾驶汽车。在仿真中有人驾驶汽车和编队的初始位置如图4所示。障碍物纵向位置为1 400 m。雾天中能见度为50 m。编队和有人驾驶汽车初始速度分别为15和20 m/s。有人驾驶汽车最大制动加速度为-4 m/s2。

图4 编队和无人驾驶汽车初始位置
4.1 不考虑主动拯救的仿真
在该仿真中,汽车编队忽略了有人驾驶汽车的潜在碰撞风险并在距离障碍物较远处完全停车,因此编队不会有碰撞事故发生。仿真中有人驾驶汽车和障碍物的纵向位置、速度和加速度分别如图5、图6和图7所示。有人驾驶汽车和障碍物的纵向位置的局部图如图8所示。由于考虑的障碍物为静态,其速度和加速度均为零。为便于讨论,图中仅绘制出了有人汽车驾驶员和障碍物的距离小于能见度后障碍物的状态,此时驾驶员可观察到前方障碍物。
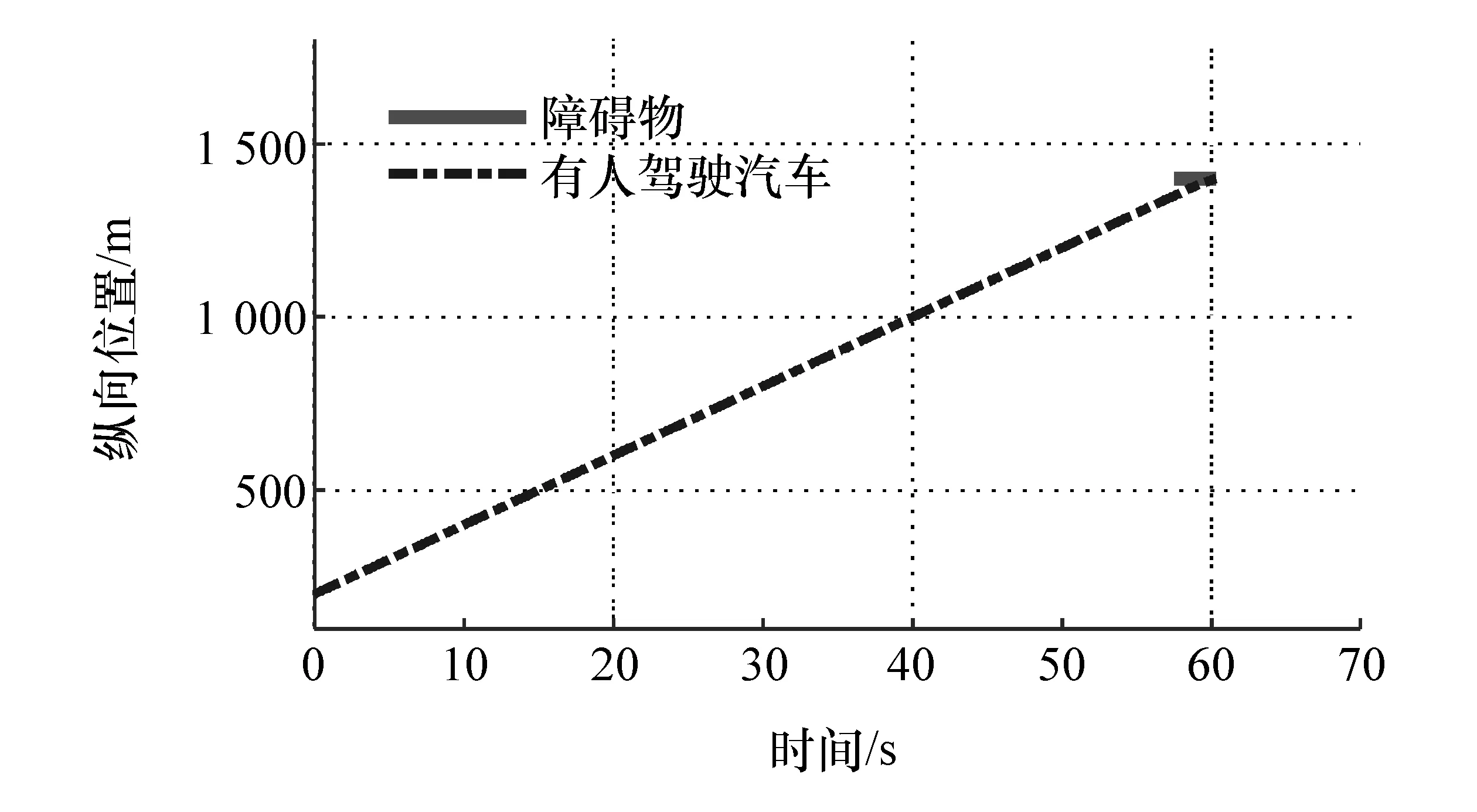
图5 有人驾驶汽车和障碍物的纵向位置

图6 有人驾驶汽车和障碍物的速度
图7 表明,驾驶员在看到障碍物后,经过很短的反应时间后以最大制动强度进行了制动。然而由于制动距离过短,如图6和图8所示,驾驶员没能在障碍物前完全制动停车,汽车与障碍物发生了碰撞。该仿真表明在低能见度的雾天环境中过高的车速会带来很高的危险。由于驾驶员感知距离不超过雾天中的能见度,当驾驶员突然发现路中障碍物后,很可能难以及时停车而引发碰撞事故。因此很有必要在这种情况下迫使驾驶员在离障碍物较远时就降低车速,即引入无人驾驶汽车编队主动拯救系统。
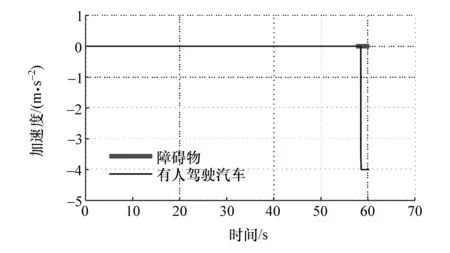
图7 有人驾驶汽车和障碍物的加速度
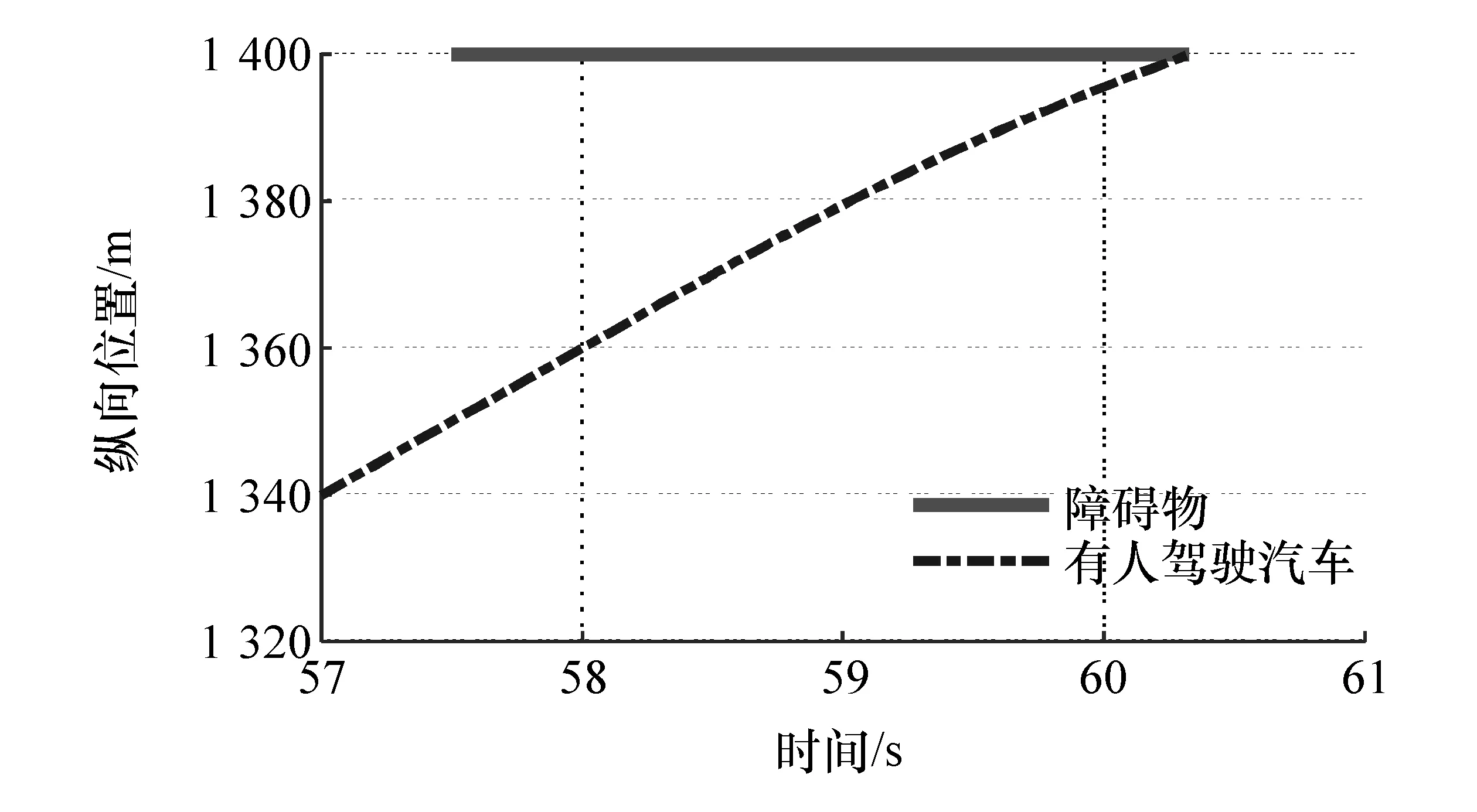
图8 有人驾驶汽车和障碍物的纵向位置的局部图
4.2 考虑主动拯救的仿真
在该仿真中,编队采用所设计的主动拯救系统来避免有人驾驶汽车的碰撞事故。为便于讨论,称经过编队变换后与有人驾驶汽车在同一车道的无人驾驶汽车为拦阻汽车。拦阻汽车、有人驾驶汽车和障碍物的纵向位置、速度和加速度分别如图9、图10和图11所示。与第一组仿真相同,这些图中仅绘制了拦阻汽车和障碍物在驾驶员可见距离范围内的状态,此时驾驶员可观察到前方的拦阻汽车和障碍物。在编队换道过程和最后停车时这些汽车的仿真截图如图12和图13所示,为更清晰说明汽车的运动状态,图中也绘出了汽车后面的行驶轨迹。

图9 拦阻汽车、有人驾驶汽车和障碍物的位置
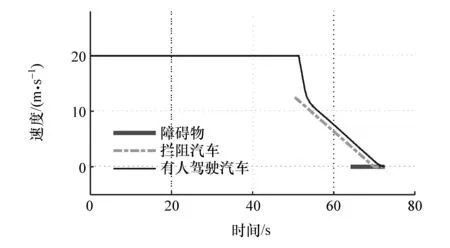
图10 拦阻汽车、有人驾驶汽车和障碍物的速度
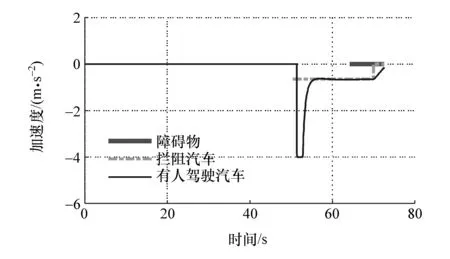
图11 拦阻汽车、有人驾驶汽车和障碍物的加速度
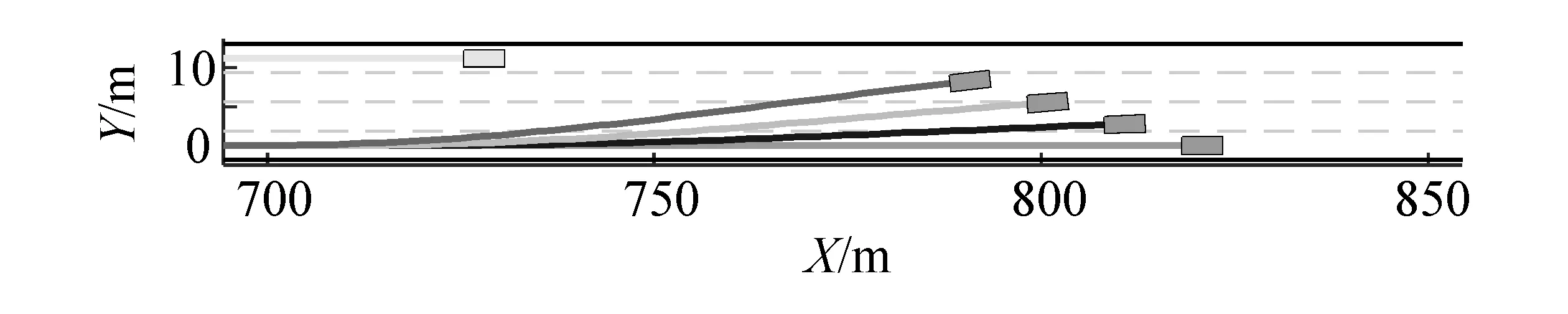
图12 编队换道时截图
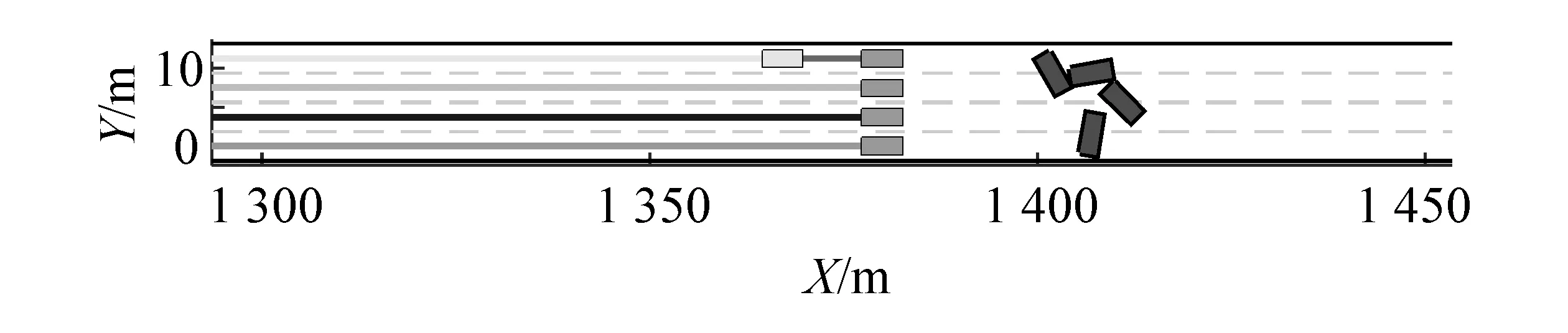
图13 仿真结束时截图
从图11中可以看出,当驾驶员看到拦阻汽车后,驾驶员随即进行了制动以维持和该车的距离。注意到当驾驶员开始减速时,由于距离路中静止障碍物距离超过能见度,故仍然未看到路中的障碍物。由图9和图10可见,在仿真结束时有人驾驶汽车和编队都能安全停在障碍物之前,并未发生碰撞事故。为进一步比较说明主动拯救系统的必要性,在图14和图15中比较了有人驾驶汽车在被拯救和未被拯救时的速度和加速度。从图15中可以看出,当驾驶员观察到前方静态障碍物或前方减速的无人驾驶车队突然出现且距离较近时,均试图通过减速来维持安全距离。受能见度较低影响,驾驶员都是在前方非常近的距离处突然发现障碍物或车辆,一般均须尽快制动保证安全的间距,所以在开始均采用了最大制动减速度控制汽车运动。在第1组仿真中驾驶员采取了最大减速度制动,但未能维持与障碍物的安全距离,与障碍物发生了碰撞;在第2组仿真中,驾驶员首先采用了最大减速度制动来避免与无人驾驶车队碰撞,然后采取了较小的制动减速度来维持与无人驾驶车队的安全距离。注意到障碍物位于1 400 m处。从图中可以看出,如果编队不考虑拯救有人驾驶汽车,由于在雾天中制动距离不足,有人驾驶汽车无法在障碍物前安全制动。当编队考虑拯救有人驾驶汽车后,驾驶员可提前进行制动来避免和前方障碍物相碰撞的危险事故。
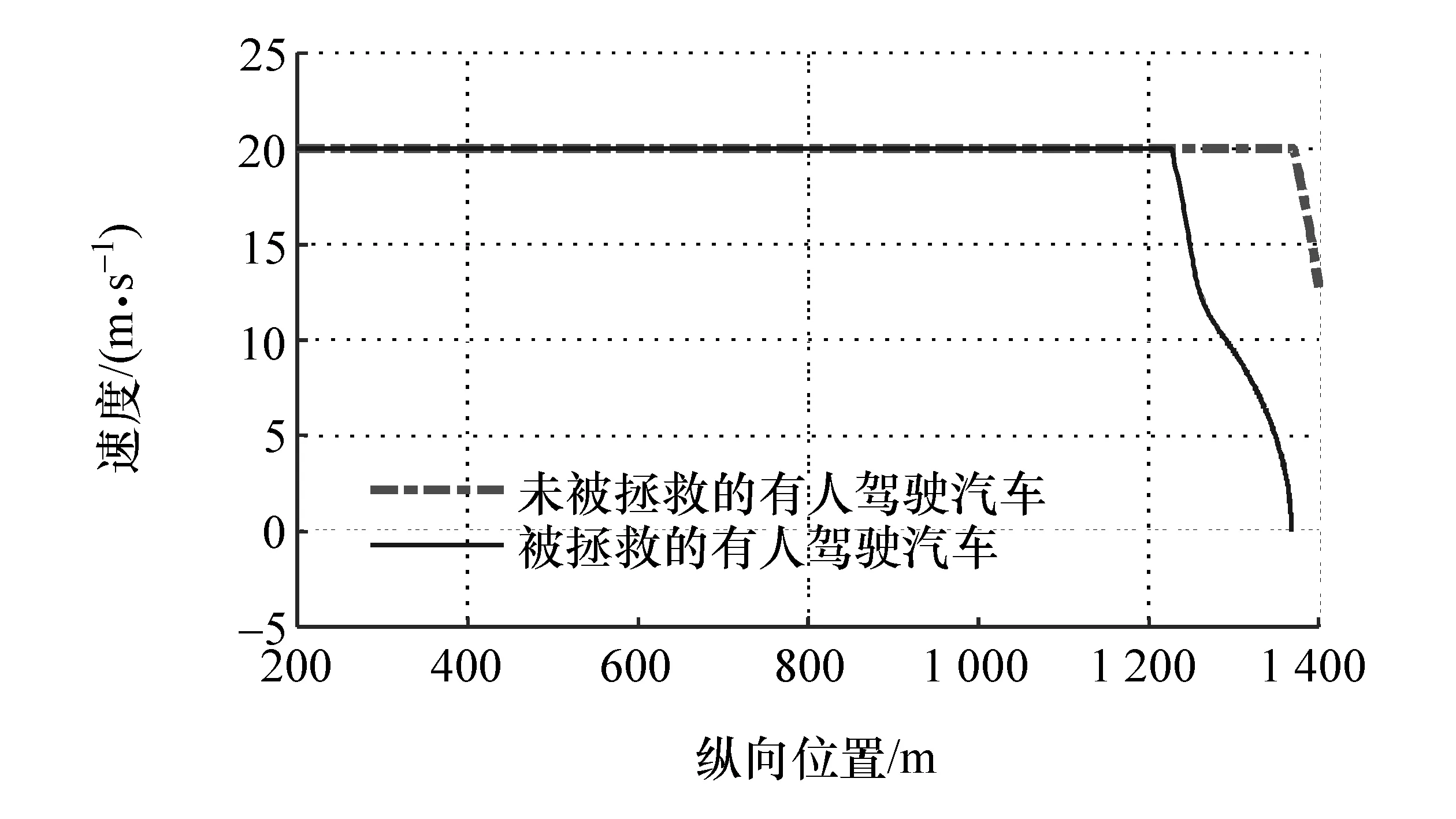
图14 有人驾驶汽车在是否被拯救下的速度对比
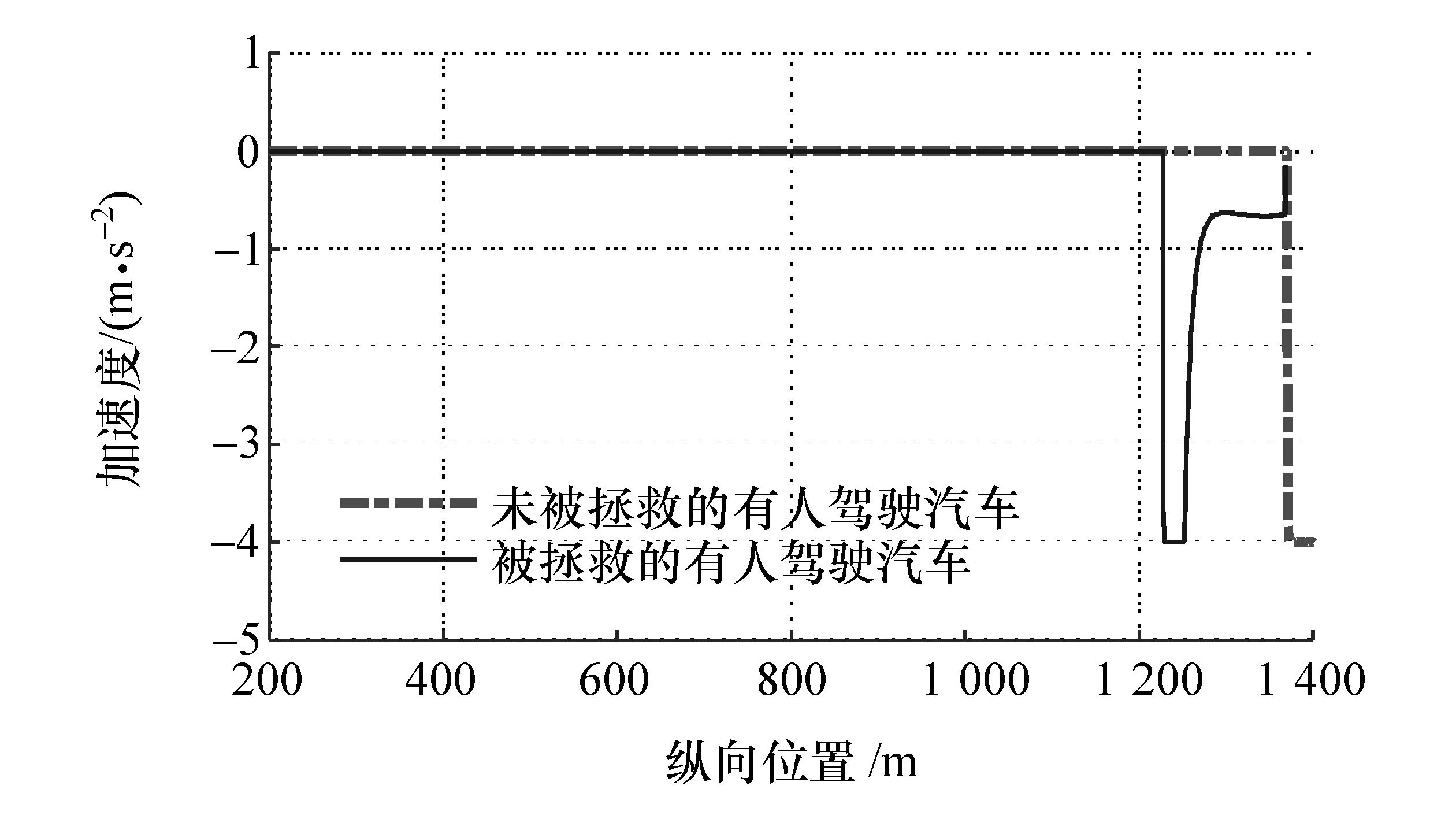
图15 有人驾驶汽车在是否被拯救下的加速度对比
编队拯救有人驾驶汽车的过程如图16所示。为更清楚表示汽车之间的相对位置,该图采用非等比例坐标绘制,图中汽车与图12和图13中汽车形状相同。其中图16(a)为主动拯救第1阶段的过程,在该过程中无人汽车编队加速超越有人驾驶汽车;图16(b)为主动拯救第2阶段的过程,在该过程中编队通过换道占用了所有车道;图16(c)为主动拯救第3阶段的过程,该过程中编队进行纵向协调形成了横向编队以防止有人驾驶汽车超车;图16(d)为主动拯救第4阶段的过程,在该过程中编队减速以迫使有人驾驶汽车及时制动减速。
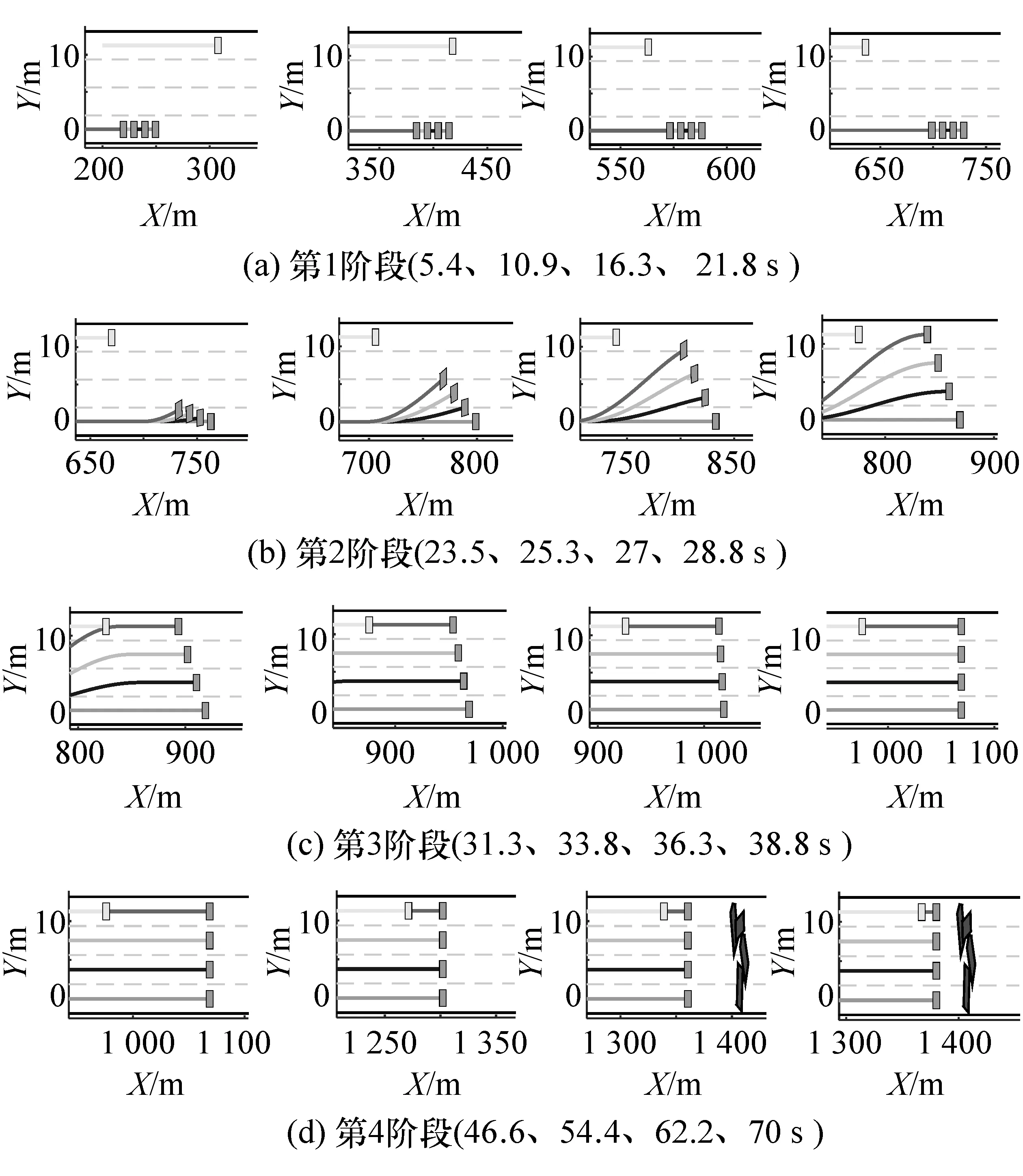
图16 编队拯救有人驾驶汽车的4个阶段
该仿真表明,如果编队能考虑拯救有人驾驶汽车,一些有人驾驶汽车潜在的危险碰撞事故是可以避免的。所以不应该仅考虑如何保证受控汽车编队的安全,也应该考虑如何通过控制汽车编队来保障有人驾驶汽车的安全。与有人驾驶汽车相比,无人驾驶系统可通过环境感知传感器和车辆通信获取更多的道路交通信息。因此无人驾驶汽车更可能在如雾天等恶劣天气中探测到有人驾驶汽车的事故风险,这为无人驾驶汽车协助有人驾驶汽车避免交通事故提供了可能。
5 结论
本文中提出了可提高未装主动安全系统汽车安全的主动拯救系统,该系统可通过控制无生命的无人车队来挽救有人驾驶汽车中的驾驶员和乘客。目前本研究仅考虑了没有乘客的无人驾驶编队,对于有乘客的无人驾驶编队而言,主动救援有人驾驶汽车会给乘客带来一定的危险。是否应该让编队中乘客担负这类风险去救援其他车辆的乘客,是未来需要进一步研究讨论的重要方向。
猜你喜欢
人民交通(2020年5期)2020-05-03
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
科学大众(中学)(2017年3期)2017-07-06
海外英语(2013年11期)2014-02-11
航空知识(2001年5期)2001-06-12
