
基于UWB/SINS组合的行人导航研究
2020-03-19 03:57张海华陈玮光刘锡祥汪宋兵
导航定位与授时 2020年2期
陈 昊,张海华,陈玮光,刘锡祥,汪宋兵
(1.国网江苏省电力有限公司检修分公司,南京 211102;2.东南大学仪器科学与工程学院,南京 210096)
0 引言
随着我国电力事业的发展,人们对供电可靠性的要求日益提高。变电站作为电网的重要组成部分,其日常的运维与检修工作对电网的安全稳定运行至关重要[1-3]。变电站,尤其是500kV及以上的大型变电站,常有规模较大的工程施工工作和检修工作,此时将有大量来自不同单位的工作人员进出变电站,长时间在一次带电设备区作业。一方面,需要在管理措施层面加强现场管控,确保作业人员不误入带电间隔,与各类带电体保持足够的安全距离;另一方面,需要在技术措施层面积极采用新技术,实时掌握作业人员的位置动态,提高现场工作的安全性。此外,变电站设备区障碍物多,负荷波动特征多变[4-5]、电磁环境复杂[6-7],局部区域卫星信号衰减严重,全球定位系统(Global Positioning System,GPS)设备无法有效定位。与此同时,变电站内人员在这些区域又有着相同的定位精度需求,在此背景下,在全区域内无差别实现实时跟踪个人的位置信息并提供位置服务,为施工和检修人员提供更高级别的安全保障成为重要的研究课题。
目前,可用于行人导航定位的技术种类繁多,适用范围和精度各有不同,其中惯性设备个人导航系统具有高稳定性、连续性与自主性的优点[8-11],成为研究的热点方向之一;然而低成本的惯性设备精度低,且其积分工作方式导致定位误差会随着时间累积,限制了其精确定位的时间长度[12]。利用无线技术实现行人定位的方案繁多[13-15],其中超宽带(Ultra Wideband,UWB)拥有独特的定位优势,其具有时间分辨率高、穿透能力强、发射功率低的特点[16];但UWB易受可视性和多径效应影响,使得定位出现不连续与不稳定的缺点[17]。本文结合惯性导航与UWB的优点,在传统的捷联惯导算法的基础上引入了零速检测,并通过阈值法剔除了UWB错误信息,使用联邦Kalman滤波将零速、UWB位置和航向信息进行融合,获得了高精度、连续且稳定的定位信息。通过现场实验证明了该方法能够大幅度提升系统定位精度,并进一步加强系统的稳定性与可靠性。
1 UWB/SINS算法定位模型
初始对准阶段,采用磁力计和加速度计输出数据对捷联惯性导航系统(Strapdown Inertial Navigation System,SINS)进行姿态角对准;行走过程中,利用陀螺仪输出积分获得姿态,加速度计积分获得速度,速度积分获得位置;在行走过程中,利用加速度计和陀螺仪输出数据进行零速检测,并利用UWB数据解算出位置与航向信息;采用联邦Kalman滤波融合零速度信息、位置信息以及航向信息,校正系统状态量,系统结构如图1所示。
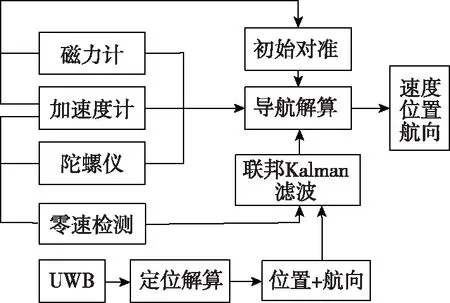
图1 系统结构Fig.1 System structure
1.1 初始对准

(1)

(2)
根据式(2)可以获得初始横滚角与俯仰角R0和P0,P0∈(-π/2,π/2),R0∈(-π,π)。
(3)
(4)
表示载体坐标系b系到水平坐标系L系的姿态转换矩阵。不考虑偏向磁分量,当规定航向角北偏东为正,北偏西为负时,初始航向角表示为
H0=-tan-1(myLmxL),H0∈(-π,π)
(5)
1.2 零速检测算法
零速检测是零速修正的前提,本文采用广义似然比检测,并通过判断运动模式设置差异化的阈值来适应不同速度的步态。
1)判断运动模式
这里将惯性测量单元(Inertial Measurement Unit,IMU)的x轴看作行走方向的前向轴,可以很大程度反映行走速度,通过计算x轴基于时间窗口的平均加速度来判断运动快慢,设k时刻的x轴的平均加速度为
(6)
根据经验值设置2个阈值Thv1和Thv2,划分三种运动速度模式mod1、mod2和mod3,分别代表慢速模式、中速模式和快速模式,划分标准如下
(7)
式中,modi表示运动模式i。
2)广义似然比检验模型
定义k时刻IMU的输出为
(8)

(9)

(10)
Thi为运动模式i下的经验阈值,zero_flag表示零速标志,其值为1时表示零速,其值为0时表示非零速。根据不同的运动速度设置不同的阈值可以更加准确地判断零速。
1.3 UWB定位

UWB解算位置会受到可视性误差的影响出现跳变,而融合后的解算位置不出现跳变误差;且行人行走属于一个连续相对较慢的过程,本文利用式(11)进行UWB误差数据剔除
(11)

ThL为阈值,uwb_flag表示UWB数据是否可用,其值为1时表示可用,否则不可用。
剔除误差数据后,UWB提供的位置相对准确,其航向角相对磁力计将更加稳定,利用两点确定直线的方式确定航向角,计算方程如下
(12)
2 导航系统联邦Kalman滤波器
组合导航系统联邦Kalman滤波器由SINS、零速修正系统、UWB系统以及磁力计构成,以SINS作为公共的参考系统,联邦Kalman滤波结构如图2所示。
图2中,Xi和Pi分别表示各个子滤波器的局部状态估计值与协方差矩阵;Xm和Pm分别表示主滤波器的状态估计值与协方差矩阵;Xg和Pg分别表示公共系统的状态估计值与协方差矩阵;βi表示系数。
2.1 导航系统联邦Kalman滤波算法

(13)
对子滤波器分别进行时间更新

(14)
对子滤波器分别进行量测更新
Pi,k=(I-Ki,kHi,k)Pi,k|k-1(I-Ki,kHi,k)T+
(15)
由于主滤波器没有量测信息,所以只进行时间更新
(16)
将子滤波器与主滤波器的估计信息融合成为新的全局状态估计信息,如下
(17)
最后按式(18)重置子滤波器与主滤波器
(18)
2.2 子滤波器系统模型
当选取支撑相位内的速度输出作为伪观测值时,传感器误差的可观测性较差,利用Kalman滤波计算难以得到精确的传感器误差估计[18],且磁力计与UWB无累计误差,因此在联邦Kalman滤波中各个子滤波器不考虑传感器误差,选择速度、位置与姿态作为状态量,即X[(δφ)T(δvn)T(δpn)T]T。
1)SINS/零速检测系统子滤波器
SINS/零速检测系统子滤波器模型如下
(19)
其中,Wk-1和V均视为彼此不相关的零均值白噪声序列;状态转移矩阵Fk|k-1与噪声输入矩阵Gk|k-1具体如下
(20)
对SINS/零速检测系统子滤波器进行速度融合。通过观测值对系统的速度进行修正,观测向量及观测矩阵分别为
(21)
其中,Z=03×1-vn中03×1表示零速检测获得的零速矢量,vn表示惯性导航解算获得的速度矢量。
2)SINS/UWB系统子滤波器
其状态方程与SINS/零速检测系统子滤波器相同,观测方程不同;对SINS/UWB子滤波器进行位置、航向融合。通过观测值对位置、航向进行修正,观测向量及观测矩阵分别为
(22)
式中,Hs是SINS解算出来的航向角,Hu是UWB解算出来的航向角,Ps是SINS解算出的位置,Pu是UWB解算得到的位置。
3)SINS/磁力计子滤波器
其状态方程与SINS/零速检测系统组合子滤波器相同,对SINS/磁力计子滤波器进行航向融合。通过观测值对航向进行修正,观测向量及观测矩阵分别为
(23)
式中,Hs是SINS解算出来的航向角,Hc是磁力计解算出来的航向角。
3 现场应用
捷联惯性导航实验设备采用法国SBG SYSTEMS公司的Ellipse2-A系列,产品内部包含3个正交的加速度计和3个正交的陀螺仪以及1个三轴磁力计。SBG安装于脚部(建议安装处为试验中采用的右脚脚踝),对行人行走数据进行采集,实验中坐标系采用的是前右下坐标系,系统的采集频率为100Hz(见图3)。UWB采用的是研创物联的Mini3s系列,其最大测量距离为50m,定位误差为35cm,频率为3.5Hz,UWB数据包含可用基站数目,当可用基站数小于3时,弃用UWB数据信息(见图4)。

图3 SBGFig.3 SBG Ellipse 2-A AHRS used in the experiment

图4 超宽带Fig.4 UWB Mini 3s and in the experiment
现场试验区域为南京地区某500kV变电站设备区14m×16m的矩形区域,围绕该区域行走1圈,总路程60m。当可用基站数据少于3时,就不使用UWB数据。图5中,(0,0)是起点也是终点,围绕该矩形区域逆时针旋转;从(0,0)出发依次经过(-14,0)(-14,16)(0,16)回到(0,0);点表示WUB解算位置;虚线表示SINS解算获得的轨迹,实线表示SINS-UWB组合导航轨迹,图中五角星的位置为4个基站的位置。

图5 定位轨迹Fig.5 Location trajectory
误差曲线如图6所示。图6中,虚线为SINS轨迹误差,点划线为UWB解算估计误差,实线为SINS-UWB联合解算误差。统计3条曲线定位误差,如表1所示。
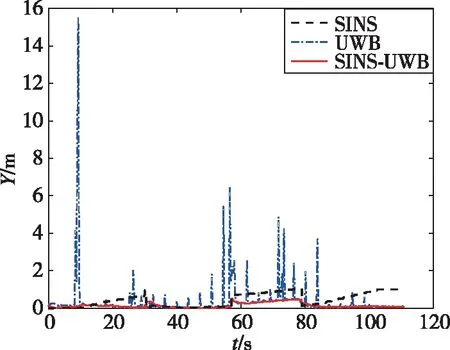
图6 定位误差Fig.6 Location error

表1 定位误差Tab.1 Location error
从表1中可知,SINS与UWB定位误差均值与最大值均大于SINS-UWB组合导航,其中SINS是由于误差累计导致位置与航向发生漂移,而UWB主要由于可视性误差与多径效应导致定位误差;组合导航方法可以平滑轨迹曲线,其轨迹更加接近于真实轨迹,误差未明显受到变电站复杂电磁环境的干扰。
4 结论
采用UWB/SINS组合系统实现了变电站现场区域的定位功能,在传统的捷联解算基础上引入了零速检测,并通过阈值法剔除了UWB错误信息,最后利用联邦Kalman滤波融合了UWB、磁力计、零速等信息,获得了较高的系统定位精度。现场试验表明,组合系统的定位误差小于UWB系统与SINS,能够消除UWB系统中的可视性误差以及SINS的累计误差,稳定性与可靠性都有进一步提升,适用于高精度变电站现场区域无差别导航。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
客联(2022年4期)2022-07-06
舰船科学技术(2022年10期)2022-06-17
成都信息工程大学学报(2022年2期)2022-06-14
国际太空(2021年11期)2022-01-19
科技与创新(2021年24期)2022-01-03
当代陕西(2019年17期)2019-10-08
地理教育(2019年1期)2019-03-06
中国化妆品(2017年12期)2017-06-27
智能计算机与应用(2016年1期)2016-03-02
