
球形机器人非线性PID控制器研究与设计
2020-03-27 18:18高宏力邱德军应宏中
机械设计与制造 2020年3期
廖 丹,高宏力,邱德军,应宏中
(西南交通大学机械工程学院,四川 成都 610031)
1 引言
球形机器人属于一类典型欠驱动机械系统,即控制输入数目少于系统自由度的机械系统。欠驱动机械系统的分析与控制系统设计一直是极具挑战性的研究领域[1],而球形机器人属于其中最复杂的系统:MIMO系统。
球形机器人的研究历史只有近十年,主要集中于美国,瑞士等国家。2006年,由文献[2]在前人的基础上首次推出一种新型独轮自平衡机器人Ballbot。该团队将系统近似为两个独立的二维无耦合系统,对两个平面系统分别设计控制器,控制系统由两层构成,内层采用比例-积分控制器处理反馈,外层采用线性二次型调节器,成功实现其平衡控制。该方法控制器设计相对简单,但忽略了平面系统间的强耦合性,与实际系统模型相差较大,控制效果也不理想。2008年某研究团队设计了BallIP独轮机器人[3],2010年瑞士某大学研发出单球自平衡机器人[4],2012年某大学研发团队设计一款相似结构的机器人[5],上述三个团队控制方法主要采用线性PID控制器与LQG控制器,并且其完整动力学模型过于复杂不能转化为二阶非线性微分方程,现有的非线性控制方法无法用于该欠驱动机器人。综上所述,目前应用于球形机器人系统的控制方法主要是针对机器人的线性模型进行的线性控制方法,非线性控制方法在球形机器人系统上的研究鲜有发现。针对上述问题,运用拉格朗日法得到球形机器人动力学模型的二阶非线性微分方程形式,并验证该动力学模型的正确性,为非线性控制器的研究提供基础。设计一种并联非线性PID控制器,实现了球形机器人的平衡控制和运动控制,通过Simulink进行仿真,验证控制策略的可行性,同时该控制器对外界扰动具有一定的自适应性。
2 球型机器人系统结构
球形机器人主要由三大部分组成:机身,万向轮与底部圆球。该机器人由三个伺服电机直接驱动三个全向轮运动,全向轮在水平面投影的角度均为120°,与球轴线的倾斜角度为45°。机器人的结构示意图,如图1所示。传感器由陀螺仪,加速计和地磁三个传感器组成,用于检测机器人的自身姿态信息,编码器用于测量球体轮的转动。
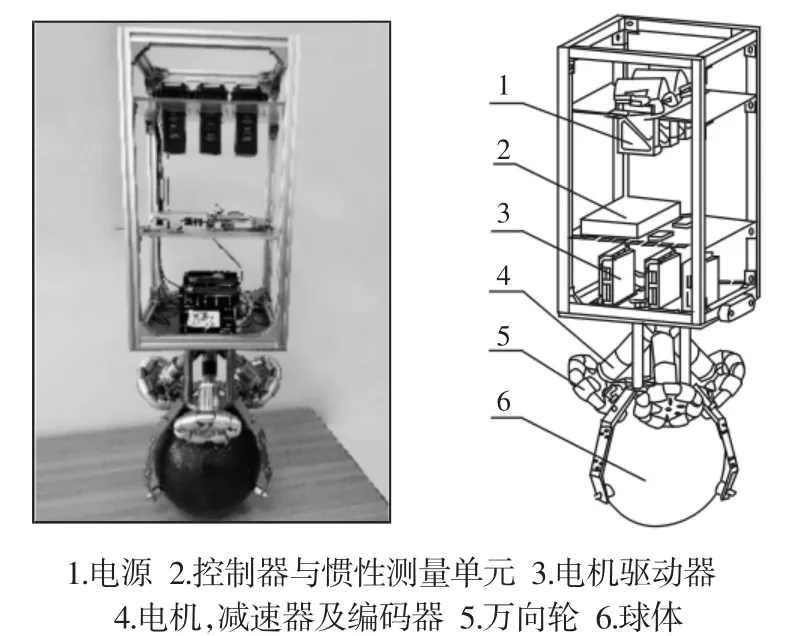
图1 球形机器人结构示意图Fig.1 The Schematic Diagram of Ballbot Mechanism
3 系统动力学建模
3.1 系统建模假设与坐标系定义
定义惯性参考坐标系{0},球心为坐标系原点。将惯性参考坐标系分别沿x轴平移xs,沿y轴平移ys,以平移后的球心为新坐标系原点,新坐标系命名为球体坐标系{1}。根据欧拉角,球型机器人机身分别绕转动后的动坐标系X轴,Y′轴,Z″轴转动,得到坐标系{2}。定义球体球心的位置坐标为:

式中:φx,φv—机身的偏转角与俯仰角;θx,θv—为了描述球体的位置坐标引入的两个变量,并不表示球体的方向角,因为在实际的系统中我们关心的并不是球体的方向而是球体的位置信息。
3.2 动能与势能的计算
球体的势能为0,球体的动能:

3.3 拉格朗日方程求解动力学模型

式中:τx—球体x轴方向的虚拟总力矩;τy—球体y轴方向的虚拟总力矩[7]。拉格朗日方程中的拉格朗日函数为L=Tb+TW-Vb-VW广义坐标为 q=[θxθvφxφv]T:
根据拉格朗日法建立动力学模型[6],设外部驱动力为:

把结果转化为如下式的形式:
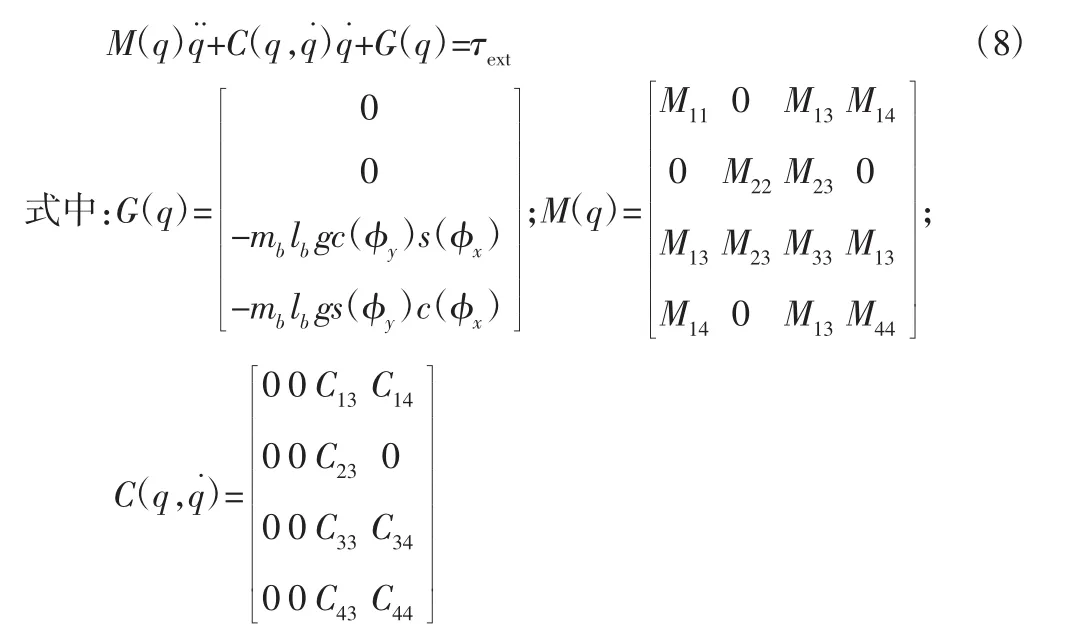
式中:s(·),c(·)—sin(·),cos(·),惯量阵 M(q),离心力和科氏力矩阵C(q,q˙)参数较多表达式复杂,在这里省略。参数及变量定义,如表1所示。

表1 球形机器人设计参数Tab.1 Parameters of the Ballbot
3.4 动力学模型的验证
在MATLAB下建立球形机器人系统的动力学模型,分析在特定的情况下系统的开环响应曲线,通过与系统的动态性能对比判断动力学方程正确性。
零状态零输入的条件下系统开环响应曲线,如图2(a)所示。各偏转角度为0,表明系统在不受任何干扰时保持平衡状态,符合物理现象。假设系统初始状态时状态量的数值为x=[0 0 0.2 0 0 0 0 0]T此情况下物理现象为:机器人机身向前倾倒,底部圆球向后运动,观察图2(b)曲线与物理现象相符。因此,可认为该模型在一定程度上可用来描述球形机器人系统。
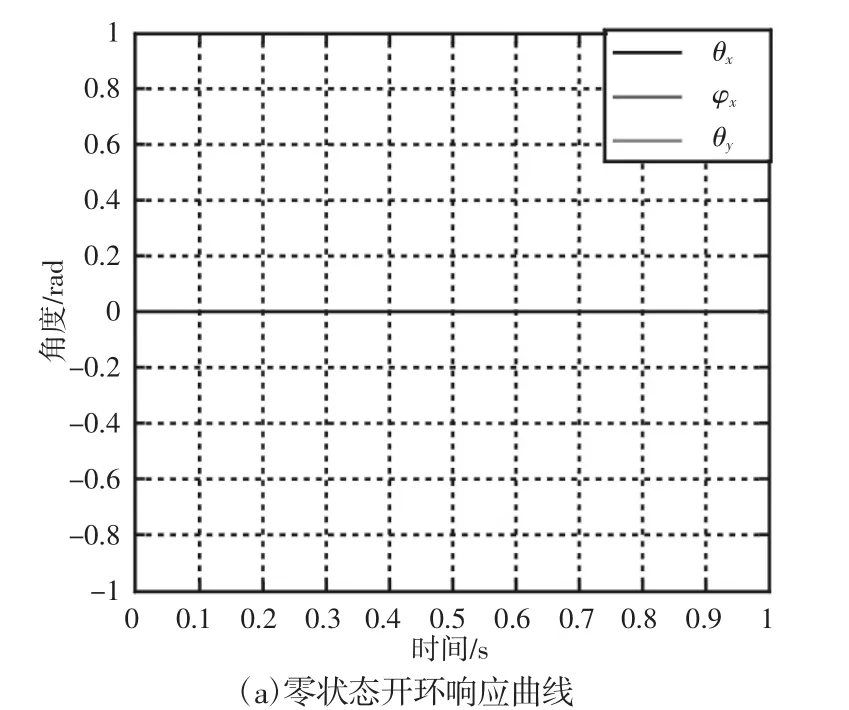

图2 系统开环响应曲线Fig.2 System Open-Loop Response Curve
4 控制器设计与仿真
4.1 非线性系统模型的简化处理
首先定义状态量为:x=[θxθyφxφyθ˙xθ˙yφ˙xφ˙y]T
定义系统的输入量 u 为:u=[u1u2]T=[τxτy]T
球形机器人系统是一个开环不稳定系统,在φx,φy∈(-π/2,π/2)时,只有一个平衡状态:机身竖直向上。在平衡点xe的领域内有 sinφx≈φx,cosφx≈1,sinφy≈φy,cosφy≈1,且忽略与 φx,φy相关项的影响,对动力学模型进行近似。
4.2 控制器设计
目前应用于球形机器人的控制方法主要是针对机器人的线性模型进行的线性控制方法,控制方法主要为线性PID与LQR结合的方法。实际球形机器人控制系统是一个离散的复杂非线性系统,现有线性的PID控制器无非线性环节,控制域较小,无法直接控制非线性系统。当用线性PID方法实现球形机器人的平衡控制时,无论怎样调节控制器参数,机器人的俯仰角与偏转角趋于0rad和πrad。球形机器人是一个开环不稳定系统,在开环状态时,任何微小的扰动都会使得机器人出现竖直向下的状态,从图中可以看出线性PID控制器对非线性模型并没有起到闭环控制作用。因此,急需一种较为有效的非线性控制方法,针对球形机器人系统的系统非线性模型设计一种有效的非线性控制器。由于球形机器人的系统动力学模型十分复杂且不够精确,过于复杂的控制算法难以实现,另外系统控制器的结构和参数需要依靠经验和现场调试来确认,这种情况下应用PID控制技术最为方便[8]。采用一种基于非线性PID控制器的控制系统,如图3所示。
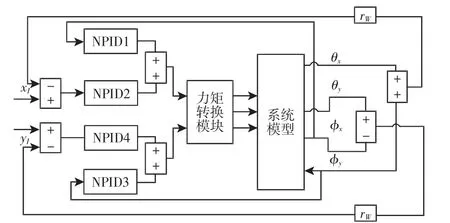
图3 控制结构示意图Fig.3 Control Structure Diagram
目前,非线性PID控制器大致分为两类:一类是直接控制量型,一类是增益调整型。选择较为简单的直接控制量型控制器:

式中:u,e—控制量输入与控制响应误差信号;x,θ—非线性函数的自变量向量和参数向量;uP(·),uI(·),uD(·)—比例、积分、微分三个非线性分量函数。可以看出这类控制器的作用对象为控制分量,并对控制分量的非线性直接设计[9],该方法具有结构简单,物理意义清晰等优点。所以控制器的具体形式为:

KP(θ)为非线性比例参数,适当地选择参数KP和ωP值使控制量 u(θ)在较小时斜率较小,在较大时斜率较大[10];KP(θ)为非线性微分参数,它与KP(θ)共同参考了球形机器人的动力学方程得到的。
4.3 仿真实验
球形机器人的控制器应完成并实现两种的控制任务:一是平衡控制,即保持机身自平衡姿态;;另一种是运动控制,即控制机器人的位移运动。平衡控制问题是其中最首要的问题,其控制目标是使机器人的机身部分姿态镇定在直立位置附近,即机身的俯仰角与偏转角均趋于0rad。利用控制器NPID1与NPID3实现机器人的平衡。给定系统初始倾角φx=0.2rad,φv=-0.2rad。仿真过程中控制器的主要参数为:kp1=-45,kd1=-3.9;kp3=-53,kp3=-3.5。非线性参数分别为;ω1=5;ω3=3。仿真结果,如图4所示。系统在初始倾角下迅速响应约在4s内机身纠正倾角,实现机身的平衡控制。
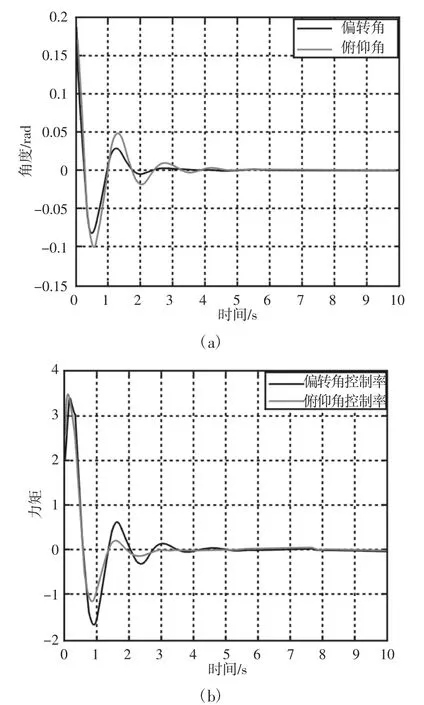
图4 平衡控制仿真图Fig.4 The Simulation Diagram of Balance Control System
机身平衡后,利用控制器NPID2与NPID4实现机器人的运动控制。NPID1与NPID3的参数值不变,仅需要调节新增PID控制器参数,这种方法大大降低了整定PID参数的难度与工作量。仿真过程中控制器的主要参数为:kp2=-8,kd2=-0.92;kp4=-15,kd4=-1,非线性参数为ω2=3;ω4=2。观察仿真结果,如图5所示。球心位置在x轴方向仿真轨迹的调整时间4.2s,y轴方向轨迹的调整时间约6s,即机器人在6s后表现出较好的跟踪精度。

图5 运动控制仿真图Fig.5 The Simulation Diagram of Motion Control System
为了验证该控制方法的稳定性和鲁棒性。在模型中考虑车轮与地面的静摩擦等摩擦和外界扰动等因素,在五秒时给定一个持续时间为0.3s幅值为0.05的脉冲信号,系统仿真曲线,如图6所示。由仿真曲线可见,控制器对外界扰动具有一定的自适应性。

图6 扰动作用下系统响应曲线Fig.6 The Response of System When the Disturbance is Added
5 结论
球形机器人是一种新型的独轮自平衡机器人,作为欠驱动系统的最典型代表之一,其研究在控制和机器人学等相关学科研究与发展方面具有一定的意义。
(1)采用拉格朗日方法建立完整的三维动力学模型,并在仿真中验证了该模型可用来描述球形机器人系统;
(2)针对非线性模型设计了一种并联非线性PID控制器实现机器人的平衡及运动控制;
(3)Simulink仿真实验中证明了控制系统能够实现机器人在平衡点附近的的平衡及运动控制,同时该控制器对外界干扰具有较好的响应特性和稳定性。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
家庭影院技术(2021年6期)2021-07-28
数学大王·低年级(2021年4期)2021-04-27
消费电子(2020年5期)2020-12-28
疯狂英语·新悦读(2019年9期)2019-09-21
振动与冲击(2019年7期)2019-04-22
兵工学报(2019年2期)2019-03-13
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
制造业自动化(2017年2期)2017-03-20
