
基于小波阈值–卡尔曼的水田旋耕平地机倾角信号的去噪方法
2020-05-18 08:13梁友斌许建康周俊张颖华何瑞银
湖南农业大学学报(自然科学版) 2020年2期
梁友斌,许建康,周俊,张颖华,何瑞银
(1.南京农业大学工学院,江苏 南京210031;2.连云港双亚机械有限公司,江苏 连云港 222000)
基于全球卫星导航系统(GNSS)的智能水田旋耕平地机,能有效提高土地平整度,提高肥料利用率和排灌效率,具有不受光线、风力、地势起伏等外界因素影响的优点,可以全天候工作[1–2]。
机具工作过程中,GNSS系统输出的定位数据中含有噪声,导致根据定位数据计算出的倾角信号存在误差,这种倾角信号会影响控制系统的控制效果,进而降低水田旋耕平地机的平地质量;因此,需要对倾角信号进行滤波处理,以保证平地机良好的工作性能。王梦樱等[3]采用小波阈值降噪法对GPS伪距观测值进行降噪处理,有效提高了GPS的定位精度;夏友祥等[4]将卡尔曼滤波应用于GNSS多路径效应的误差处理,使农田定位精度得到改善;刘兆惠等[5]提出了一种基于小波分析和卡尔曼滤波相融合的交通数据去噪算法,该融合算法能有效去除交通数据中的噪声干扰,提高数据质量。
笔者在水田旋耕平地机田间作业过程中,采集平地机在自动调平过程中的倾角信号,运用小波阈值法和卡尔曼滤波,对倾角信号进行去噪处理,分析它们的去噪效果,建立基于小波硬阈值法的卡尔曼最优估计融合算法。
1 水田旋耕平地机的结构及平地系统的工作原理
水田旋耕平地机通过三点悬挂机构与拖拉机挂接,通过调节折叠液压缸和调平液压缸分别实现平地机的折叠和调平,其总体结构如图1所示。
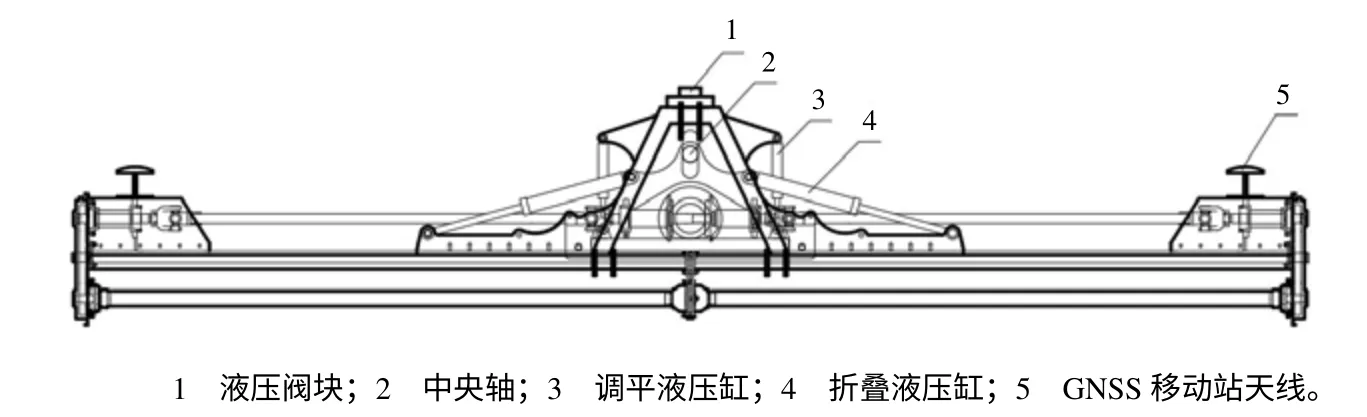
图1 水田旋耕平地机总体结构Fig.1 Structure of the paddy field rotary tiller
由于硬地层不平整,拖拉机在行走过程中会发生倾斜,水田旋耕平地机也随之倾斜,平地机当前位置与水平位置所形成的角度即为平地机的倾斜角度。基于GNSS的水田旋耕平地系统,依据倾角信号判断平地机当前倾斜状态,当系统检测到平地机的倾斜角度超出允许范围时,对平地机进行相应调节,使其保持水平状态;因此,精确测量倾角信号是控制系统实现准确控制、获得良好作业效果的必要前提。
2 倾角信号的采集及去噪
2.1 倾角信号的采集
采用GNSS技术,测量水田旋耕平地机工作过程中的倾角信号。试验前,将GNSS基准站置于试验田附近空旷处,移动站的2根天线对称磁吸于平地机两侧,天线之间的基线距离为4 m。
机具作业过程中,GNSS天线实时监测平地机的位置信息,根据2根天线之间的基线距离和相对高程差,GNSS接收机自动计算出平地机的倾斜角度,并将倾角信号发送给控制系统,控制系统根据倾角信号角度值的大小发出相应控制指令,调节调平液压缸,使平地机绕中央轴转动,从而保证机具处于水平状态。控制系统接收并保存倾角信号,从而实现倾角信号的采集。
2.2 去噪方法的确定
2.2.1 小波阈值法
运用小波阈值法[6–11]中小波软阈值法和小波硬阈值法,对倾角信号进行去噪处理。
2.2.2 卡尔曼滤波
运用卡尔曼滤波法[12–13]对倾角信号进行去噪处理。
2.2.3 小波–卡尔曼融合算法去噪
基于对小波阈值法和卡尔曼滤波的分析,建立基于小波硬阈值法的卡尔曼最优估计融合算法。
倾角信号χ(t)经小波硬阈值法处理后得到信号g(t),将信号g(t)实时输入到卡尔曼滤波系统中,利用小波硬阈值法获取干扰噪声的统计特性,作为卡尔曼滤波的修正信息,再通过卡尔曼滤波对信号g(t)进行滤波,得到修正后的信号s(t)。
3 融合去噪方法的应用
3.1 不同滤波方法的去噪效果
对原始倾角信号分别运用小波阈值法、卡尔曼滤波法、融合法进行滤波处理,滤波效果如图2所示。

图2 不同滤波方法对倾角信号的滤波效果Fig.2 Filtering effect by using different filtering methods on inclination signal
小波软阈值法得到的信号连续性较好,但由于对小波系数的收缩处理,使得重构信号与真实信号之间产生了一定程度的偏差,导致部分有效信号被压缩(图2–1);小波硬阈值法得到的信号在阈值点处产生了振荡,使去噪后的倾角信号产生局部抖动,且当小波系数的绝对值大于阈值时,不能实现对信号的有效去噪(图2–2);卡尔曼滤波根据上一刻的状态估计和当前状态的观测来计算出当前状态的估计,所以前一时刻的估计误差也同样会累加到下一时刻,且倾角信号的系统模型难以精确建立,从而使卡尔曼滤波的整体去噪效果变差,还会出现信号的局部失真现象(图2–3);小波–卡尔曼融合算法对小波阈值法和卡尔曼滤波的缺点进行了折中处理,保留了大波动信号的有效信息,又去除了小波动信号中的噪声干扰,使信号曲线较为平滑,在高频、瞬态信号的处理上也明显优于小波阈值法和卡尔曼滤波,去噪效果较好(图2–4)。
小波–卡尔曼融合算法在小波硬阈值法去噪的基础上,利用卡尔曼滤波对信号进行二次修正,将小波硬阈值法的阈值量化处理和卡尔曼滤波的最优估计特性相结合,实现倾角信号的有效去噪。选择将小波–卡尔曼融合的滤波方法实际应用到对平地机倾角信号的处理当中。
3.2 小波–卡尔曼融合算法滤波的应用
在水田旋耕平地机田间试验中,采集平地机作业过程中的倾角信号,如图3所示。运用小波–卡尔曼融合的方法对倾角信号进行滤波处理,观察分析其去噪效果。

图3 田间试验采集的倾角信号Fig.3 Inclination signal collected in the field test
采用信噪比和均方根误差[14–15]评定融合算法的去噪效果:信号的信噪比越高,真实信号和去噪信号的均方根误差越小,说明去噪结果越接近真实值,去噪效果越好。选择在小波分解基础上,对倾角信号进行1层分解与重构;根据重构信号与原始信号对信噪比进行保守性估计。
分别对融合算法滤波前后的倾角信号进行处理,如图4所示,倾角信号经融合算法去噪后信号中的噪声成分明显减少。

图4 基于小波理论的噪声信号估计Fig.4 Noise signal estimation based on the wavelet theory
倾角信号经融合算法处理后,信号的信噪比由21.704提高到39.116,均方根误差从0.035 1降低至0.012 6,这意味着倾角信号经融合算法处理后,信号中的噪声成分明显减少,信号的精确度得到改善,数据波动范围和标准差均有所降低,倾角信号更加稳定。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
中国特种设备安全(2022年3期)2022-07-08
科学大众(2021年19期)2021-10-14
科技风(2021年19期)2021-09-07
北京航空航天大学学报(2021年7期)2021-08-13
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
电子制作(2019年13期)2020-01-14
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
