
工程测绘中激光雷达测绘技术的应用探析
2020-06-02 10:04杨立波
中国金属通报 2020年5期
杨立波
(湖南省地质调查院,湖南 长沙 410000)
高效、高质量的测绘结果是工程测绘工作开展的直接目标,基于现代科学技术的发展,各种先进的、数字化的测绘技术逐渐发展起来,较传统测绘技术而言,在测绘效率、测绘精度以及复杂环境适应方面具有显著优势,本文主要选取激光雷达测绘技术为研究对象,其可高精度、全要素、多维度、快速获取地物信息,得到了大范围推广应用,加强相关应用分析具有重要意义。
1 激光雷达工作原理
激光雷达测绘技术,主要是利用移动激光雷达系统开展测量工作,可快速、大面积获取测量目标三维坐标数据。激光雷达,主要组成部分包括激光器、激光发射机与接收机、光束整形与激光扩束装置、光电探测器、回波检测处理电路、计算机控制与信息处理装置等。
在激光雷达测绘中,主要是利用计算机分析回波信号,实现数据采集、处理,提取有用信息,为后期精密图像绘制做好基础工作,本文主要就工程测绘中激光雷达测绘技术的应用展开具体论述。
2 工程测绘中激光雷达测绘技术的应用
近些年,激光雷达测绘技术不断发展、完善,下文主要就其应用优势与流程做了简单分析。
2.1 激光雷达测绘技术特点
激光雷达测绘是一种高效、高精度的测绘技术,其主要应用特点可归纳为以下几点:
(1)实现非接触测量,探测距离可达数千米,且单一视角下可获取三维坐标。
(2)采集数据量大,每秒可测量数十万个点。
(3)分辨率、精度高,激光雷达可同时追踪两个及其以上目标,不会因此出现分辨率下降的情况。
(4)主动式探测、抗干扰能力强,不受自然光、太阳高度角的影响,可24h全天候作业。
(5)数字化采集、兼容性好,测绘效率高,后期处理与输出便利。
(6)激光雷达体积小、质量轻,可采用机载、车载、船载、人工背负等多种平台。
2.2 激光雷达测绘技术流程
基于上文分析可知,激光雷达测绘技术在工程测绘中优势显著,目前已经得到了广泛推广应用。激光雷达测绘技术的应用流程可归纳如下:激光扫描→获取高密度、高精度激光点云数据与高分辨率数码影像→数据处理→生产所需高精度数字化产品。以常用的机载激光雷达测绘技术为例,其具体应用要点如下:
(1)数据采集:根据工程测绘背景与任务要求,合理选择激光雷达系统、飞行平台,落实控制测量与航线设计,保证数据采集的有效性。
(2)数据处理:激光雷达扫描获取的是原始激光点云数据,需通过数据预处理、坐标系统转换、激光点云数据分类处理,获得精化后激光点云。
(3)高精度数字化产品生产:包括数字高程模型(DEM)、数字正射影像(DOM)、数字线划图DLG和地面线等。
3 实例分析
3.1 项目背景
本文仅以某水利水电工程项目测绘为例展开分析。本工程为“十三五”重大建设项目,水电站装机容量2400MW,属于抽水蓄能电站。本项目测绘难度较大,测区偏僻、交通不便、植被茂盛,根据综合分析决定采用机载激光雷达测绘技术,其可较好适应复杂环境,穿透部分植被,采集数据密度大、精度高、分辨率高,满足测绘需求。
3.2 机载激光雷达测绘方案
结合项区域实际情况与测绘要求分析,决定采用机载激光雷达测绘方案:
(1)本项目选用扫描鹰HS-1600机载激光雷达系统,并配备了1台飞思数码航摄相机,获取点云数据与影像数据,系统具体参数见表1。

表1 系统参数
(2)点云数据实施坐标转换、粗分类和精分类后,生成等高线关键点、构建TIN,生成DEM、等高线和高程点数据。
(3)影像数据实施畸变校正、开展空中三角测量,构建立体像对,立体采集地物信息。
(4)对点云生成地貌图与地物图进行套合,获得地形图。
3.3 机载激光雷达测绘技术应用要点
3.3.1 数据采集
本项目测区20km2,划分为12个子测区,具体航摄参数如下:
(1)相对航高:550m。
(2)激光发射频率:100kHz。
(3)影像旁向重叠度:35。
(4)航向分辨率:65。
取测区下库处一个控制点设置1台地面基站;测区分3个架次实施数据采集,飞行时间超过4h。
3.3.2 点云处理
(1)数据预处理:采用Trimble Applanix软件POSPAC解算轨迹数据,采用RIPROCESS解算各航带数据。
(2)点云数据拼接:采用RIPROCESS拼接模块进行处理,合理调整参数实现平面匹配,确保扫描数据、控制点与原始地形数据吻合。
(3)激光点云分类:采用噪声点滤波方法,将低点、空中点、移动地物点分离;通过反射强度、回波次数、地物形状等参数的综合自动分析,分类植被茂密区点云数据;所有分类出的地面点建立TIN,高程突变区做好参数调整,自动分类不理想区人工编辑。
3.3.3 影像处理
本项目各测区构建区域网实施空中三角测量,空三像方匹配后获取正射影像,调整色彩、亮度等参数,镶嵌数字正射影像,确保无明显拼接迹象。
3.3.4 精度分析
(1)点云精度:本项目有效平面检查点共计57个,点云高程精度统计结果见表2,高程精度良好,满足规范要求。
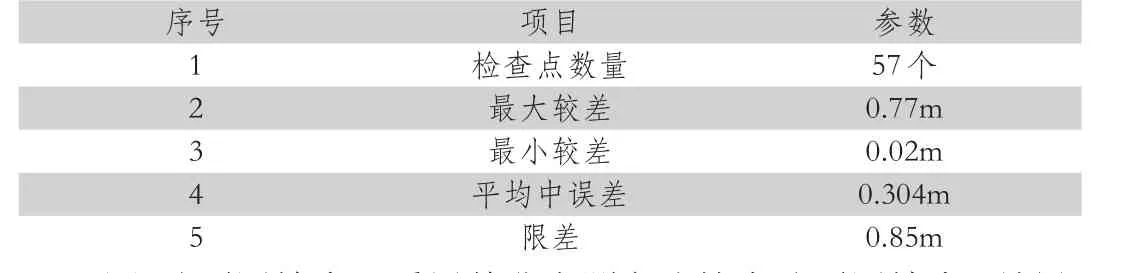
表2 点云高程精度统计结果
(2)地形图精度:采用外业实测方式检查地形图精度,结果见表3,平面坐标、高程精度良好,满足规范要求。

表3 地形图平面精度统计结果
4 结语
综上所述,激光雷达测绘技术具有精度高、效率高、适应性好等优势,在工程测绘中应用广泛。根据工程实践可知,激光雷达测绘平台众多,包括:机载、车载、船载、人工背负等,可根据测区实际情况进行合理选择;测绘过程中,严格根据测区情况做好系统选型、数据采集工作,科学开展点云数据与影像数据处理工作,保证测绘成果质量与精度满足要求。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
军民两用技术与产品(2022年1期)2022-06-01
资源信息与工程(2021年5期)2022-01-15
汽车观察(2021年8期)2021-09-01
空间科学学报(2021年4期)2021-08-30
矿产勘查(2021年3期)2021-07-20
建材发展导向(2021年2期)2021-03-02
当代陕西(2020年23期)2021-01-07
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
