
电动机拖动虚拟实验设计及在教学中的应用
2020-06-18 04:06韩洪洪
实验室研究与探索 2020年3期
金 文, 陈 曦, 韩洪洪
(天津大学电气自动化与信息工程学院,天津300072)
0 引 言
随着虚拟技术的快速发展,虚拟实验作为一种新兴的实验手段在实验教学中得到了广泛的应用[1-3],业已成为高校实验教学的重要组成部分[4-6]。与现有针对单一课程的虚拟实验设置不同,本教研课题组依托学校本科实验教学改革与研究项目“电类一体化虚拟实验室的开发”,面向电路基础、电工测量、模拟电子技术基础、电机及拖动基础、数字电子技术基础、自动控制理论、电力电子技术、单片机原理及应用、可编程控制器、智能装置与设计等10 门课程进行了一体式的虚拟实验建设,旨在将上述全部课程的虚拟实验进行整合提升并在统一的虚拟实验环境中开发与实施,实现界面、操作、调试的“三统一”,学生只需要学通学懂该虚拟实验环境,就可以掌握几乎所有电类系统设计、仿真、调试的方法,有效地提高了学生的学习效率。经过对现有主流电路仿真软件的比较,最终选择了NI公司的Multisim 14 软件,以Multisim 14 为基础通过二次开发搭建了虚拟真功能,而且它的教育版本具有面向课程教学的多种独特功能[7],非常适合于虚拟实验的开发。不过Multisim主要面向电路设计与仿真[8-9],在机电混合仿真方面比较欠缺,虽然有不少文献研究了基于Multisim的电机仿真方法[10-12],但面向同时包含电机和负载的电动机拖动系统的虚拟实验研究较少,单一的电机仿真模型难于直接用于电动机及拖动基础这门以机电能相互转化为主要教学内容的课程。为此,本文研究了在Multisim 下电动机拖动系统虚拟实验的设计方法,给出了具体的仿真电路、仿真不收敛问题的解决方法以及开设的虚拟实验内容和实验教学效果。
1 电动机拖动系统建模
电动机拖动系统主要由电动机、传动机构和工作机构组成,在虚拟实验中电机模型来描述电动机特性,用负载模型来描述传动和工作机构特性。
1.1 电机建模
在直流电动机建模过程中采用以下微分方程[13]:
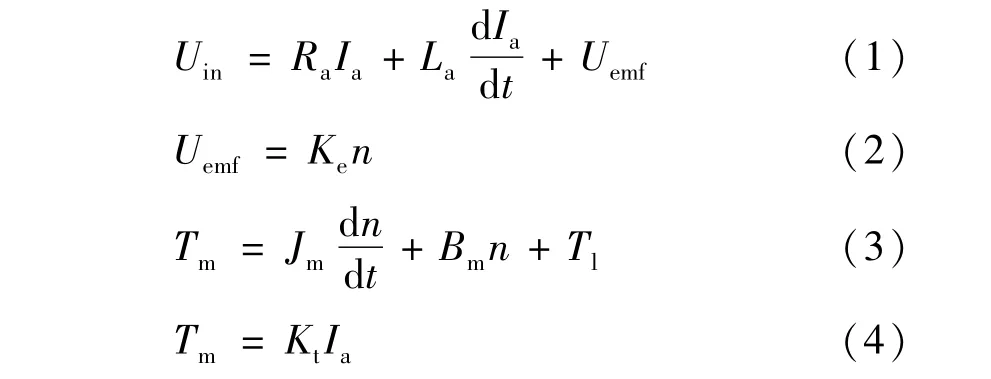
式(1)、(2)是电压方程,式(3)是运动方程,式(4)是转矩方程。其中Uin为电动机电压,Ra为电枢回路电阻,La为电枢回路电感,Ia为电枢电流,Vemf为感应电动势,n 为电动机转速,Ke为电动机电动势转速比,Tm为电动机转矩,Tl为负载转矩,Kt为转矩电流比。
基于上述微分方程组,构造基于Multisim 的仿真电路如图1 所示。图1(a)用于描述电压方程,图1(c)用于描述转矩方程和运动方程,图1(b)用于描述电动机转速。电压方程可视为电枢电阻、电枢电感和感应电动势串联而成,所以用电感L1、电阻R1和Analog Behavior Model(ABM)电压源U2的串联电路来等效电压方程。ABM 是自Multisim 10 开始引入的仿真单元[14],它利用数学或逻辑表达式来设置电压或电流输出值,因此非常适合于描述非线性电路。

图1 基于Multisim的直流电动机仿真电路
采用类似的方法,根据文献[15],得到交流电动机仿真电路模型如图2 所示。
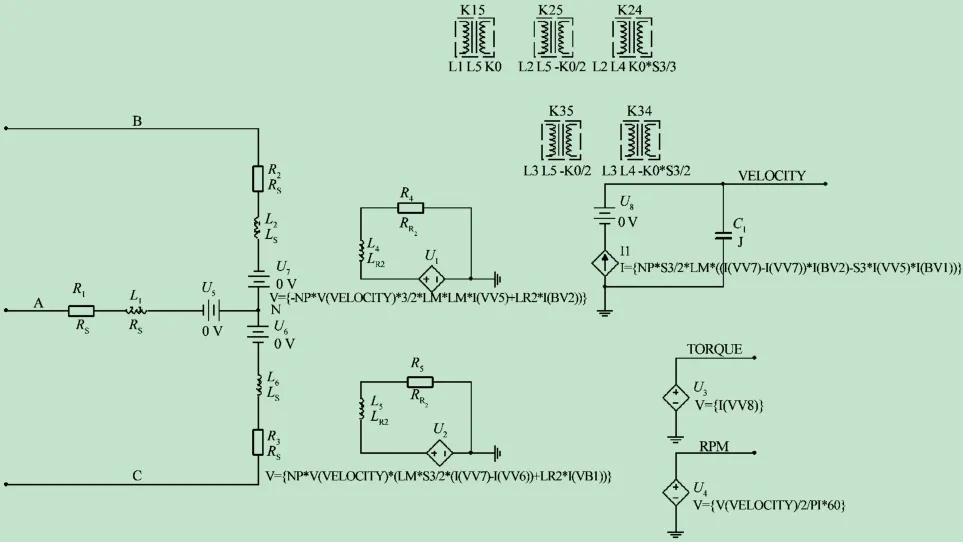
图2 基于Multisim的交流电动机仿真电路
1.2 负载建模
按转矩随转速变化的情况负载可分为恒转矩类负载和变转矩类负载两大类,恒转矩类负载又可细分为位能性恒转矩负载和反抗性恒转矩类负载,变转矩类负载可细分为通风机型负载、直线型负载和恒功率型负载[16]。在虚拟实验中,所有负载都用Analog Behavior Model(ABM)电流源来描述,如图3 所示。
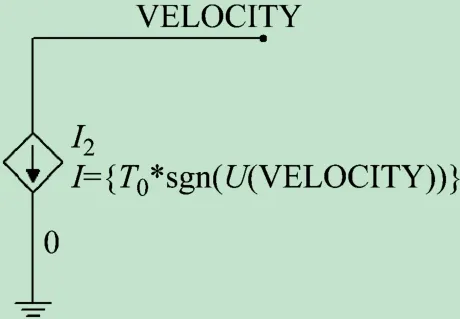
图3 负载模型
通过设置不同的电流值来表示不同类型的负载。对于位能性恒转矩负载,其转矩绝对值大小是恒定的,而且方向不变,所以电流值设为:

对于反抗性恒转矩类负载,其转矩的绝对值大小是恒定不变的,转矩的性质是阻碍运动的制动性转矩,所以电流值设为:

式中:sgn为符号函数。
对于通风机型负载,其转矩的大小与转速的平方成正比,所以电流值设为:

对于恒功率型负载,其负载转速和转矩之积为常数,所以电流值设为:

式中:P0为常数,表示负载转速和转矩之积。
1.3 电动机拖动系统虚拟实验设计
在电动机拖动系统虚拟实验设计时,考虑到电机及拖动基础是以机电能相互转化为主要教学内容的课程,所以对电动机和负载模型并没有直接采用如图1、2、3 所示的电路原理图形式的模型,而是对其进行了封装,用实际的电动机、负载图片来图形化表示电动机拖动系统中的各个组件,如图4 所示。
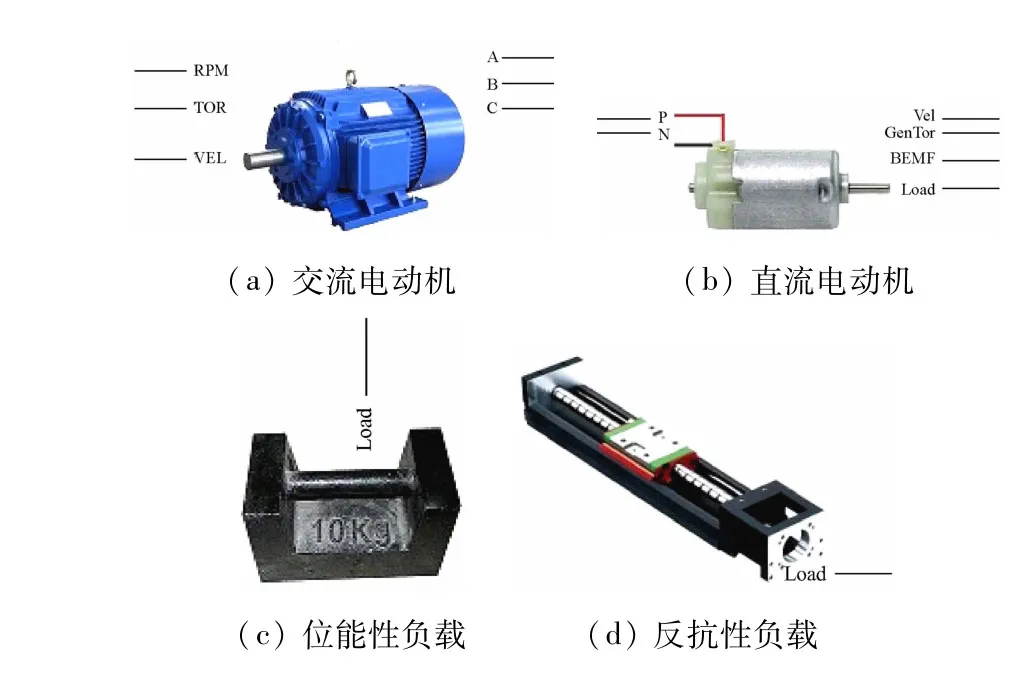
图4 图形化的电机拖动系统组件
以图1 中的直流电动机为例,其封装过程为:①利用Multisim 的菜单项Tools |SPICESAVE SPICE netlist将与图1 对应的SPICE netlist 保存为文件,②新建Multisim 仿真文件,③选择菜单项Tools |Component wizard来生成新的元件,元件外观从实际的直流电动机图片导入,元件的SPICE 模型从之前保存的图1 的SPICE文件导入,④把封装完成的元件保存到元件库中,在以后的电机拖动系统虚拟实验中就可以直接使用元件库中的直流电动机。在电机拖动系统虚拟实验过程中会出现仿真不收敛的问题,Multisim提示“Unable to converge during transient analysis”,这是由于Multisim的仿真引擎XSPICE 在求解一阶常微分方程组时会因为初始条件设置不同和函数自身不连续性而无法得到数值解。如在仿真反抗性恒转矩类负载时出现的不收敛情况就与负载转矩值I =T0sgn(U(VELOCITY))在0 点处不连续有关。为了解决该问题,①在Multisim的Analysis and Simulations选项中把Transient的Initial conditions设为“Set to zero”,即把电路中全部器件的初始条件都设为0,②把反抗性恒转矩类负载值改为:

即当转速绝对值<5 时,负载值为0,当转速绝对值>5 时,负载值为T0·sgn(U(VELOCITY))。通过上述设置,就不会出现仿真不收敛的问题了。类似的通风机型负载的负载值要设置为:

2 电动机拖动虚拟实验在教学中的应用
2.1 电动机拖动虚拟实验内容设置
针对直流电动机工作特点和工作机构的机械特性,依据电机及拖动基础以开环控制为主的教学要求,设置了关于交直流电动机的6 个基础型虚拟实验:①直流电动机控制反抗性恒转矩负载实验;②直流电动机控制位能性恒转矩负载实验;③直流电动机控制直线型变转矩负载实验;④交流电动机控制反抗性恒转矩负载实验;⑤交流电动机控制位能性恒转矩负载实验;⑥交流电动机控制直线型变转矩负载实验。此外还设置了4 个设计型实验:①直流电动机控制通风机型变转矩负载实验;②直流电动机控制恒功率型变转矩负载实验;③交流电动机控制通风机型变转矩负载实验;④交流电动机控制恒功率型变转矩负载实验。直流电动机控制位能性负载实验如图5 所示。
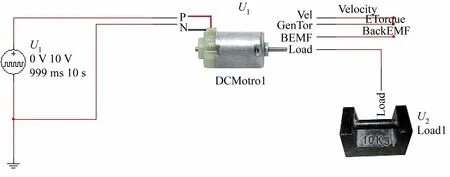
图5 直流电动机控制位能性恒转矩负载仿真实验
2.2 实验效果与特色
通过上述虚拟实验的开设,取得了良好的实验教学效果,从时间和空间两个维度完善、扩充了现有实验室实验,具体特色如下:
(1)完善了现有实验室实验的流程,提高实验室实验的效率。原有实验室实验的流程是实验课前根据实验指导书进行预习→实验课上教师讲解实验→实验课上学生做实验→实验课后学生撰写实验报告,这种流程中依据实验指导书进行实验预习的效果欠佳。由于实验指导书是用文字和图片的形式描述实验过程,学生难于有“真情实感”,难于了解实验的具体过程,这就直接导致学生在实验课上自己动手做实验时容易出现遗漏实验步骤、操作不规范、接错线等情况,而对于电机及拖动基础课程而言操作不规范、接错线往往会造成电动机等实验装置的损坏,严重的话会造成学生的人身伤害。通过在实验室实验课前和课后引入虚拟实验,形成了新的实验室实验流程,即实验课前根据实验指导书进行预习并进行虚拟实验撰写预习报告→实验课上教师讲解实验→实验课上学生做实验→实验课后学生进行设计型虚拟实验撰写实验报告。通过在实验课前引入虚拟实验,学生可以边阅读实验指导书边做虚拟实验,可显著强化对实验指导书相关内容的理解,同时由于虚拟实验的实验装置完全模拟实际实验装置,学生可以提前模拟实验操作,发现操作中的问题并予以解决,这样在实验室实验时就可以提高实验效率,避免出现不必要的误操作。另一方面在课后引入设计型虚拟实验,学生可以趁热打铁,用实验室实验学到的知识解决新的科学问题,既强化了学生对基本知识的认识,又促使学生举一反三,学以致用。
(2)弥补现有实验装置形式不足,增加实验内容,提高学生创新能力。以电机与拖动基础课程所涉及的工作机构为例,常见的负载有反抗性恒转矩类负载、位能性恒转矩负载,通风机型负载、直线型负载和恒功率型负载,实验室的实验装置很难把上述5 种类型的负载都配套齐全,而虚拟实验通过设置不同的电压或电流源形式就可以轻而易举地模拟出上述5 种不同类型的负载,学生在此基础上就可以自己完成实验室实验无法实现的实验,例如位能性负载、通风机型负载和恒功率型负载等3 个设计型实验就是在现有实验室无法完成的。多个新增的实验内容可有效帮助学生实现知识迁移,增强学生独立思考和解决问题的能力,且虚拟实验不存在损坏实验装置的情况,学生可以大胆想、大胆试,这无疑会鼓励学生勇于创新、敢于创新,同时在实验的过程中提高动手能力和创新能力。
(3)直观显示实验室实验难于观察的实验现象,帮助学生理解重难点理论知识。大学基础型实验的最主要目的是通过学生观察实验现象来帮助学生理解、验证理论知识,但受制于测量仪器和实验条件,有些实验现象难于观察,有些实验数据难于连续采集,这就造成学生理解上的困难。比如感应电动势是直流电动机中一个重要的概念,但感应电动势难于直接测量,感应电动势随时间变化的趋势更是难于直观观测,这是实验室实验无法解决的问题,而虚拟实验则可以把这些“隐藏在背后”的现象与规律直观的揭示出来,由此就可以帮助学生提高感性认识,更好地理解重难点问题。
3 结 语
基于Multisim设计了适用于电机及拖动基础课程的电机拖动系统虚拟实验,该虚拟实验中的组件不仅与真实电动机、负载在外观、机电特性上高度一致,而且可以直观地显示若干实验室实验无法直接观察的信息,满足了虚拟实验的要求。教学实践表明,基于该模型的虚拟实验可与实验室实验互为补充,互相促进,促进学生实验技能提升,开阔学生视野,实现知识的迁移与融合。
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
少儿美术(2020年10期)2020-11-05
数学大王·趣味逻辑(2019年6期)2019-08-13
通信电源技术(2016年1期)2016-04-16
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
中国教育技术装备(2015年19期)2015-03-01
