
基于多项式演化模型的永磁同步电机参数辨识
2020-06-24 00:14汪兆巍武志刚华南理工大学电力学院广东广州510641
广东电力 2020年6期
汪兆巍,武志刚(华南理工大学 电力学院,广东 广州 510641)
电机是根据电磁感应原理工作的机器,随着生产的发展,电机的发展反过来促进了社会生产力的不断提高。随着自动化技术的发展,电机也有了相当大的改进。由于控制系统和计算机技术的发展,许多类型的控制电机都是基于通用旋转电机的理论而开发的。电机控制具有很高的可靠性和准确性。作为最关键的机电能量转换设备,电机已应用于国民经济和人们日常生活的各个领域。
在电气时代,电机的速度控制一般采用模拟方法,并且多数是简单控制方法。简单的控制包括电机的启动、制动、正向和反向控制以及顺序控制。近年来,随着技术的发展和进步,以及市场对产品功能和性能的要求不断提高,同步电机的应用越来越广泛,特别在智能化领域更是如此。永磁同步电机由于具有功率密度高、效率高、可靠性高、结构简单、体积小、重量轻等特点,可以满足高性能系统的要求。近年来永磁材料的价格下降,使其成为电机系统节能的首选。
电机的参数易受温度影响,其中转子电感易受磁路饱和的影响,导致电机的参数经常改变。此外,对电机进行理想化速度控制时,需要对电机进行建模。在矢量控制系统中,由于电机运行过程中的温度变化和磁路饱和,电机的定子和转子参数不再保持恒定,这都导致参数随而时间变化。为了获得出色的动态特性,必须实时识别电机参数。
目前常用的方法有最小二乘法、频域响应法、卡尔曼滤波法、模型参考自适应法、人工智能算法等。最小二乘法具有收敛速度快、辨识精度高、动态响应好等优势,但存在收敛速度与辨识稳定性相矛盾的问题[1-5]。频域响应法将采样数据导入计算机后,经过一系列的软件处理程序可以有效辨识出对应参数;但该方法对输入信号的要求极高,并且无法反映动态过程中的非线性[6]。卡尔曼滤波法则是将电机受扰动过程看作一个动态过程,利用扰动的统计特性将扰动信号滤出去,最终得到有用信号[7],可适用于非线性系统的离线和在线计算;但必须保证待辨识参数收敛于它们的真实值,同时也对硬件要求比较高[8]。模型参考自适应法通过比较相同输入量情况下的参考模型和可调模型的差值,调整可调模型中的辨识参数,当差值达到最小值时,可以将可调模型中的参数看作实际系统中的参数[9-11],有效解决收敛速度与辨识稳定性的矛盾;但开关器件的延迟会影响可调模型中电压和电流值检测的误差,最终影响实际运行状态的辨识精度[12-13]。人工智能算法包括神经网络法[14-19]、粒子群优化算法、遗传因子算法等,这类算法可应用于解决复杂运行状况下电机的参数辨识问题;但是模型以及算法较为复杂,同时需要通过系统利用算法进行学习以减小误差函数[20-23]。
上述常用方法固然在某些方面有一定的优势,但仍存在收敛速度与稳定性相矛盾等方面的问题。为了解决此类问题,本文主要采用较为简单的多项式演化模型,利用MATLAB/Simulink软件中的相应工具测算出电压、电流和转速的实时数据,并通过对时间模型中的第一阶段数据进行处理即可得出辨识结果,采用在随机噪声干扰情况下进行多次试验取平均值的方式能较为精确地辨识出对应参数;因此,该方法具有算法简单、辨识精度高、应用范围广、响应速度快等优势。
本文首先介绍了永磁同步电机的数学模型,并根据数学模型推导出相应的开环和闭环速度控制模型,从而引出模型中的待辨识值(包括d轴和q轴的等效电感L、定子电阻Rs、增益系数KT、折算到转子轴的总转动惯量J、折算到转子轴上的黏性摩擦系数f和干摩擦转矩折算到转子轴的总转动惯量Cr)以及直接测量值(包括d轴和q轴上的等效电压ud、uq和等效电流id、iq,转子转速ω);然后,针对永磁同步电机的速度控制模型设计出一种参数辨识方法,该辨识方法引入了多项式演化模型作为转速参考值,运用曲线拟合方法以及相应的矩阵变换计算出待辨识参数值;最后,运用该辨识方法进行MATLAB/Simulink仿真算例验证。
1 同步电机相关控制模型
1.1 数学模型
本文介绍的同步电机控制系统包括三相同步电机和机械负载,其中同步电机选择具有非凸极永磁体的类型,以便于忽略饱和度和阻尼效应对电机的影响。由于需要对电机进行速度和转矩控制,因而在现有的几种电机模型中选取在dq参考系下功率守恒的park模型对电机控制系统进行建模。
该电机控制系统的电气部分方程式为:
(1)

(2)
式(1)、(2)中:ψsf为来自永磁体的磁通量峰值;Np为电机的极对数。
该电机控制系统的机械部分方程式为:
(3)
(4)
式(3)、(4)中Tem(t) 为电磁转矩。
假设
(5)
将式(5)代入式(2)可得

NpLω(t)id(t)+ω(t)KT.
(6)
联立式(3)、(4)和(5)可得
(7)
其中L、Rs、KT、J、f、Cr为待辨识值,ud(t)、uq(t)、id(t)、iq(t)、ω(t)为直接测量值,后文将式(1)、(6)和(7)作为辨识算法的依据。
1.2 开环速度控制模型
当同步电机处于相对稳定状态时,可以忽略干扰以对同步电机进行开环控制。在给出速度信号后,同步电机将不受控制。随着负载的变化,电机的速度也会变化,这种变化取决于电机的特性。此时,无需将电机的速度与给定速度进行比较,因此速度的开环控制相对简单,不利之处是速度变化很大。
假设ed=-NpLω(t)iq(t)、eq=ω(t)(NpLid(t)+KT),p为微分算子,则电机控制系统的电气部分可以等效为:
(8)
电机控制系统的机械部分可以等效为
(9)
1.3 闭环速度控制模型
考虑到干扰对同步电机速度控制系统的影响,给定速度后,同步电机常数将输出端子的信息(转速)反馈到输入端,并使用输入信号进行激励。当发现电机速度发生变化时,输出端的反馈信号不满足原始输入信号的要求。此时,输入信号将被更改,以使电机速度尽可能接近设定值。同步电机调速的闭环控制更加复杂,系统的速度变化也小得多。

图1 dq参考系下同步电机的一般开环速度控制方案Fig.1 General open loop speed control scheme for synchronous motor in the dq reference frame

2 同步电机的参数辨识方法
2.1 特殊激励信号(jerk波)
大多数识别方法使用特定的输入信号﹝例如二进制序列随机信号(binary sequence random signal,BSRS)﹞来完全激励系统。但是,长时间使用BSRS这类信号会使电机控制系统产生许多问题。BSRS使用速度步进信号激励电机控制系统,从而产生峰值机械转矩以增大负载转速,同时还需要考虑到电机运动过程中产生的感应电流而引起的机械阻力;因此,电机的机械部件需要承受机械阻力,而电气部件需要承受产生的感应电流,两者均会加重电机系统的负担。
对于jerk激励信号而言,jerk是加速度的导数,使用jerk控制信号可以限制振动,而振动是机械驱动精度和磨损的误差来源。该控制信号对于大惯性的快速运动特别有用。图3显示了jerk控制信号中的jerk值、加速度、速度和位移曲线。
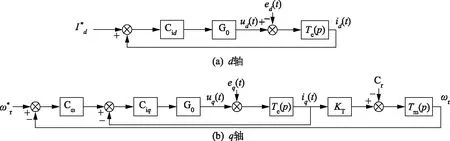
图2 在dq参考系中同步电机闭环速度控制方案Fig.2 Closed-loop speed control scheme for synchronous motor in the dq reference frame
与其他的控制信号相比,加速度变化不是那么突然。使用分段恒定的jerk值可以获得比第一级系统约束更少的加速度斜坡。由于同步电机具有相似的加速度和转矩,因此没必要进行过多的转矩限制。

(10)

(11)
(12)
(13)
式(10)—(13)中j为恒定的jerk值。
2.2 参数辨识方法的原理
基于之前建立的同步电机模型输入和输出变量的相应关系,本辨识方法分别对电机控制系统机械部分及电气部分进行测量与分析。这些变量是时间多项式,其范围取决于jerk激励曲线,并施加于电机控制系统的运行过程。
首先,数据获取阶段需要电流、电压和速度信号的演变。基于上文对模型结构和设定值信号的知识,可知描述输入及输出变量的时间多项式形式。然后通过已有的曲线拟合工具(如MATLAB曲线拟合工具)计算这些多项式的系数,曲线拟合的方式可以通过采样取点自行拟合方式或者MATLAB曲线拟合的方式,但经过多次实验发现自行拟合的误差较大,因而本文仍采取MATLAB曲线拟合的方式进行电机参数辨识。由于待辨识参数为多项式系数的函数,最后可以计算出相应的参数值。为了达到简化运算的目的,可以将id的参考信号设定为零。
如果影响信号的扰动是高斯白噪声且均值为零,那么使用辨识的时间信号多项式系数可获得无偏结果。本文所提出的方法具有以下特征:使用多项式参考信号而不是BSRN类型输入;通过分析系统可测量变量的时间多项式来执行识别,而不是使用基于动态行为的经典方法。

图3 jerk速度激励信号Fig.3 Jerk velocity excitation signal

图4 参数辨识方法的原理 Fig.4 Principle of parameter identification method
图5显示了可测量变量ud、uq、id、iq和ω(t)和ωr(t)的波形实例。

图5 jerk激励下的同步电机可测量变量实例Fig.5 Measurable variables of synchronous motor excited by jerk excitation
从图5可以看出,速度设定值和实际速度值大致相同,同时d轴的电流设定值也近似与实际电流保持一致。
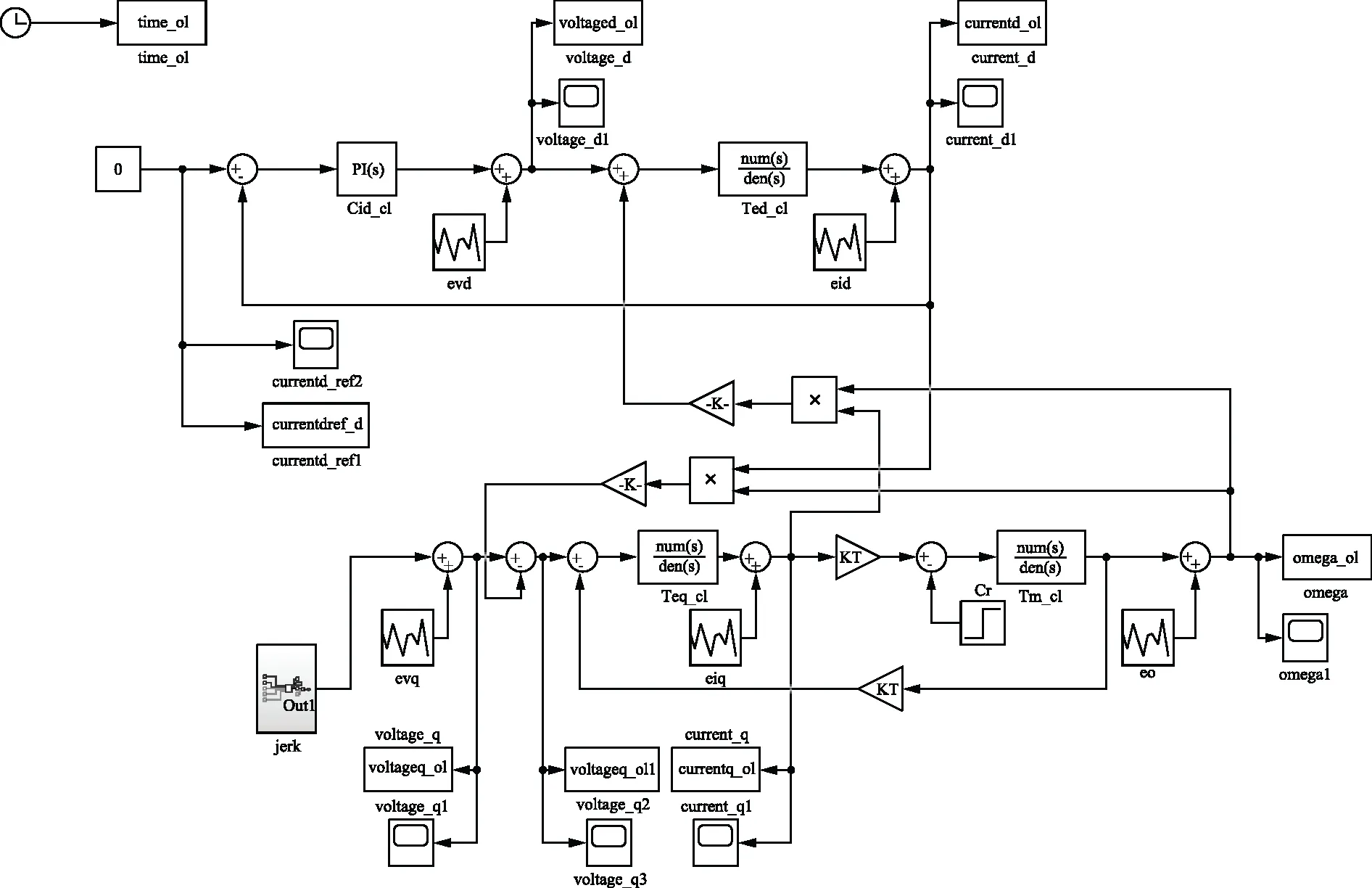
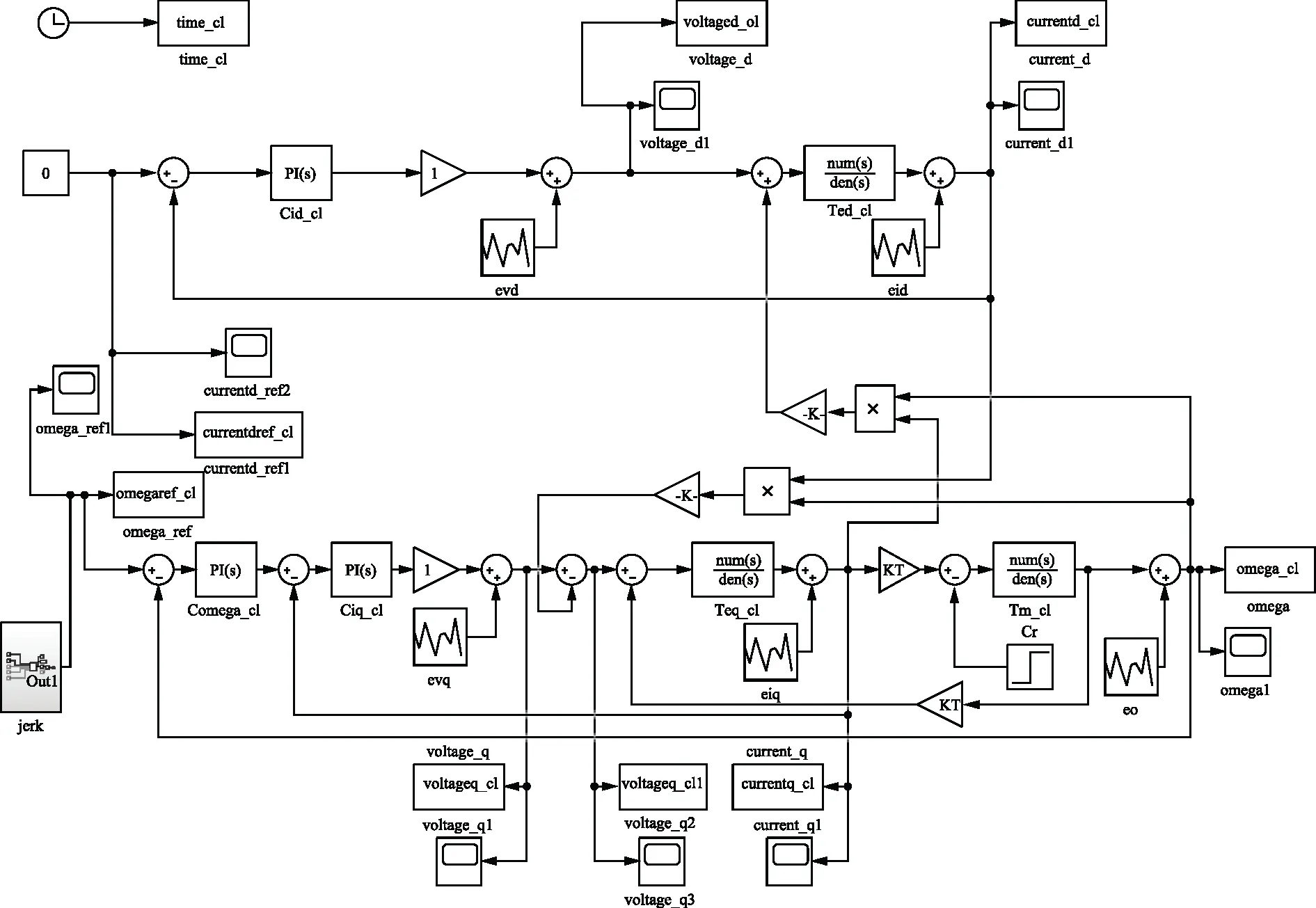
当t0+Δt ω(t)=aωt2+bωt+cω, (14) 联立等式(7)和(14)可得 (15) 式(15)可以写成 iq(t)=aiqt2+biqt+ciq. (16) 由于将d轴电流参考值设定为0以简化运算,式(14)和(16)均代入式(1)和(6)可得: (17) 其中电机极对数Np=4,式(17)可以写成: (18) 式(14)—(18)中,计算参数aω、aiq、aud、auq、bω、biq、bud、buq、cω、ciq、cud、cuq、dud、kud均可由MATLAB曲线拟合工具得到。该辨识算法的思路是:通过曲线拟合工具得到测量值,根据测量值以及矩阵变换计算出电机的参数值。 如果将联立式(17)和(18)的结果写成矩阵形式 Avθv=Bv, (19) 根据多项式系数的对应关系,其中 Bv=[audbudcuddudkudauqbuqcuq]T, θv=[LRsKT]T. (20) 由于Av不是方阵,需要对式(19)的矩阵形式进行如下变换 (21) 将式(21)进行矩阵变换,得到矩阵 (22) 然后由矩阵θv得到相应的L、Rs、KT。 相似地,也可以将联立式(15)和(16)的结果写成如下的矩阵形式 Aeθe=Be, (23) 根据多项式系数的对应关系,其中 (24) 与前面的矩阵不同的是Ae为方阵,因而不需要进行其他的矩阵变换,矩阵 (25) 然后由矩阵θe得到相应J、f、Cr。 2.3.1 开环控制模型 上文介绍的系统识别方法涉及线性、开环和闭环线性模型的参数识别,其中可能包含纯延迟。在闭环的情况下,所提出的算法可以应用于具有单个回路的系统,并且仅应用于传感器噪声类型的干扰。如果将此方法扩展到嵌套的和受干扰的回路系统(例如机电过程),则需要对算法进行改进。 式(8)和(9)的物理参数值是从系统的初始估算、所进行的测量以及制造商给出的机械特性中得出的。图6所示的Simulink仿真框图描述了电机开环控制系统的模型和控制策略。 根据式(8)可得: (26) 式中的ud1和uq1在图6中分别由voltaged_ol和voltageq_ol表示。 图6中Cid_ol是用于调节d轴电流的PI调节器,其调节参数 (27) 2.3.2 闭环控制模型 图7所示的Simulink仿真框图描述了电机闭环控制系统的模型和控制策略。图7中:voltaged_cl、voltageq_cl、currentd_cl、currentq_cl、omega_cl分别代表直流电机的闭环电压、电流、转矩和速度;Omegaref_cl代表输入转速参考值;Cid_cl、Ciq_cl和Comega_cl分别代表电流PI调节器和速度PI调节器。 图6 同步电机开环仿真框图Fig.6 Simulation block diagram of synchronous motor open loop 图7 同步电机闭环仿真框图Fig.7 Simulation block diagram of synchronous motor closed loop 图7类似于图6,新的PI调节器参数设置为: (28) 其余参数、采样时间、仿真结果的表示形式、随机干扰的实验次数均与开环系统的参数设置相同,不再重复介绍。 同步电机的特性及其负载在表1中给出。 具体仿真过程主要分3种干扰情况:无干扰;仅有固定干扰(只有Cr干扰);固定及随机干扰。 使用Simulink工具对系统进行仿真,并使用MATLAB R2018a进行参数识别,jerk激励电压用于辨识电机的参数,直接测量值ud(t)、uq(t)、id(t)、iq(t)、ω(t)可以由MATLAB中的工作区数据得到,通过使用MATLAB提供的曲线拟合工具分别辨识3种干扰情况下的电机开环系统的参数。 对于不存在随机扰动的情况,用于多项式的系数估计的第一阶段过程在0.59 s和1.0 s之间。而且只需进行一次仿真实验辨识同步电机的相关参数就足够。仿真结果表示为误差εp和参数距离D,其计算方法如下: (29) (30) 表1 同步电机的仿真特性Tab.1 Simulation characteristics of synchronous motor 对于存在随机干扰的情况,进行单一的仿真实验辨识无法准确地计算同步电机的相关参数值和辨识精度,将100次仿真实验测定出的仿真结果表示为平均值、误差和参数距离,其计算方法如下: (31) (32) 上述3种情况进行参数辨识的结果见表2。 从表2中仿真结果可以看出:在精确性方面,该辨识方法对于除f以外的其他参数辨识精度较高,辨识参数f仍具有一定误差;在波动性方面,该辨识方法在无随机干扰情况下的波动程度较小,在有随机干扰的情况下,参数L的辨识结果波动程度较大,而除L之外的其他参数的辨识结果波动程度较小。 与电机开环控制模型相似的3种情况下进行参数辨识的结果见表3。 从表3中的仿真结果可以看出:在精确性方面,该方法对电机闭环控制系统中除了L以外的参数辨识具有高精确度,但是对L的辨识仍存在不可忽略的误差;在波动性方面,该方法对不具有随机干扰的电机闭环控制系统辨识结果较为稳定,而对于有随机干扰情况下的L参数辨识波动程度较大。L的辨识偏差产生的原因:L参数对多项式系数辨识过程的误差过于敏感,由于存在曲线拟合时多项式系数的辨识结果波动,L的辨识结果精确度也会受影响,其他参数的辨识也具有一定程度的波动性。对于L测量精确度较低的问题,可以采用多时间段采样并进行多次参数辨识的方式以减小误差。 表2 同步电机开环控制系统:jerk激励电压输入的仿真结果Tab.2 Synchronous motor open loop control system:simulation results of jerk excitation voltage input 表3 同步电机闭环控制系统:jerk激励电压输入的仿真结果Tab.3 Synchronous motor closed loop control system:simulation results of jerk excitation voltage input 本实验基于永磁同步发电机SM6443数据,在Simulink中建立电机速度控制模型,并采用芯片ADE7758将电机和电脑进行连接,在电机启动过程中,通过芯片将电压、电流和转速的实时数据输入到MATLAB工作区。 利用MATLAB自带的曲线拟合工具分别计算出曲线的多项式系数,通过多项式系数与待辨识参数的曲线关系辨识出相应参数,结果见表4。 由于外界温度和磁链饱和等因素的影响,电机参数具有实时变化性。当需要进行长时间参数辨识时,需要对每个时间段进行数据采样,通过将前一段时间的电流、电压和转速数据导入MATLAB工作区,利用MATLAB曲线拟合工具及相应的矩阵变换能辨识出该时间段电机参数的近似值。以电阻Rs为例,图8所示为电机正常运行状态下1 min内电阻的实际值和测量值曲线,实际值为电机在工况下的变化曲线,测量值为数据采样时间3 s中参数辨识结果。 表4 永磁同步电机SM6443:jerk激励电压输入的实验结果Tab.4 Permanent magnet synchronous motor SM6443:experimental results of jerk excitation voltage input 图8 jerk激励下的同步电机Rs变化曲线Fig.8 Rs curve of synchronous motor under jerk wave excitation 将图8中各个点与实际值相比较可以得出结论:本文所述的辨识方法可以应用于一段时间电机内参数的测量,测量结果具有一定的精确度,并可有效应用于环境因素造成的电机参数变化情况。 参数辨识是永磁同步电机控制系统稳定运行的基础,参数辨识结果的精确性和稳定性不仅受电机建模方式的影响,而且依赖于运动的参数辨识方法。本文根据相应的电机数学模型,建立了电机的多项式演化模型,然后运用jerk波激励电机控制系统,对模型中的相关参数进行矩阵变化从而计算出待辨识参数值,最后使用MATLAB/Simulink对上述模型及方法进行仿真算例验证。 算例结果表明该辨识方法可以精确辨识出永磁同步电机速度控制系统中的L、Rs、KT、J、f、Cr这6个参数值,有效解决收敛速度和辨识稳定性相矛盾的问题。由于算法以及模型较为简单,不需要系统对算法进行学习,同时对控制信号和硬件的要求较低。 基于此方法,未来的研究工作可以针对多项式演化模型中的系数进行无偏估计,而且可以通过阶段性数据采样的方法将电机电压、电流和转速数据输入到MATLAB工作区,从而开发出对同步电机参数的在线辨识算法。

2.3 具体仿真实现方式

3 算例分析
3.1 电机开环控制模型算例




3.2 电机闭环控制模型算例


3.3 实验验证


4 结束语
猜你喜欢
电气电子教学学报(2022年3期)2022-07-30
防爆电机(2022年3期)2022-06-17
燃料化学学报(2022年5期)2022-05-30
防爆电机(2021年2期)2021-06-09
气象学报(2021年2期)2021-05-13
现代计算机(2020年31期)2020-12-28
防爆电机(2020年6期)2020-12-14
数学大世界(2020年2期)2020-03-07
价值工程(2017年31期)2018-01-17
海军航空大学学报(2015年1期)2015-11-11
