基于模糊PID的差动制动客车防侧翻控制
2020-07-07 13:29梁国才赵慧勇陈根福
湖北汽车工业学院学报 2020年2期
梁国才,赵慧勇,陈根福
(湖北汽车工业学院 汽车工程学院,湖北 十堰442002)
大客车因车身长、质心高且轮距相对于轴距较窄而易发生侧翻,由于其载客较多,一旦发生侧翻事故所造成的危害是致命的[1]。因此,大客车侧翻安全性是车辆主动安全领域广泛关注的热点之一。车辆侧翻分为绊倒性侧翻和非绊倒性侧翻,文中对非绊倒性侧翻进行研究。目前国内外针对车辆侧翻问题的研究主要包括侧翻安全稳定性分析[2-4]和主动安全防侧翻控制系统,通过主动安全系统减小车辆的侧向加速度和车身侧倾角等,从而实现防侧翻控制。国内外对主动安全防侧翻控制系统进行了大量研究,主要包括半/主动悬架[5-7]、主动转向[8-9]以及差动制动[10-12]控制系统。文献[5]采用PID 控制及模糊控制2种方法设计了防侧翻控制器,仿真结果表明2种控制策略均能够有效维持车辆良好的侧倾稳定性;廖聪等[6]设计了基于半主动悬架的模糊滑模控制策略,提高了车辆的侧倾稳定性;文献[7]基于线性二次型调节器(LQR)进行了主动悬架防侧翻控制的研究。主动转向防侧翻控制方面,文献[8]基于八自由度整车动力学模型设计了汽车主动转向防侧翻控制策略,提高了汽车的防侧翻的能力;文献[9]基于滑模控制方法设计了主动转向防侧翻控制器,提高了汽车的侧倾稳定性。防侧翻控制的研究对象主要集中在重型车辆,主动悬架和主动转向控制系统因技术或成本等原因的限制难以在重型车辆中推广,而差动制动防侧翻控制相对于主动悬架和主动转向更易实现、成本更低[10]。因此,目前重型车辆的防侧翻控制多采用差动制动的方式,文献[11]设计了客车防侧翻集成控制系统,通过差动制动产生干预横摆力矩来实现车辆动力学控制,以维持车辆横摆和侧倾稳定性;文献[12]以横向载荷转移率为控制目标,基于模糊控制算法设计了差动制动防侧翻控制系统,避免了车辆侧翻。
文中以提高大型客车在中高速转向时的抗侧翻能力为目标,利用Trucksim与Simulink联合仿真对客车防侧翻控制进行研究。建立车辆三自由度线性侧倾模型,基于模糊PID控制方法设计了差动制动防侧翻控制系统。为了验证控制系统的有效性,在鱼钩工况下进行仿真试验。
1 模型建立及验证
1.1 整车侧倾动力学模型
车辆是一个多自由度的非线性系统,根据研究需要对系统进行简化,选择合适的自由度或将非线性问题近似线性处理。为满足研究基于差动制动的车辆防侧翻控制的动力学特性的要求,建立包括侧向运动、横摆运动和车身侧倾运动的三自由度车辆线性动力学模型[13],车辆侧倾模型如图1 所示。建立模型时做如下假设[14]:1)忽略车辆的垂向运动和俯仰运动;2)轮胎侧偏特性始终处于线性区域,忽略左右车轮载荷变化引起的轮胎特性的变化;3)忽略转向系统的影响,直接以前轮转角作为输入。根据三自由度车辆侧倾模型,有


图1 三自由度车辆侧倾模型

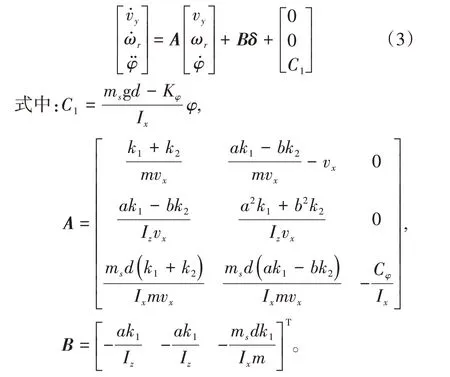
式中:m和ms分别为整车质量和簧上质量;ωr为横摆角速度;Fy1和Fy2分别为前后轮侧偏力;δ为车轮转角;φ 为车身侧倾角;Ix和Iz分别为绕x 轴和z 轴的转动惯量;a 和b 分别为质心至前后轴的距离;d为侧倾中心至质心的距离;Kφ和Cφ分别为等效侧倾刚度和等效阻尼系数;k1和k2分别为前后轮胎总侧偏刚度;vx和vy分别为纵向速度和侧向速度。
考虑到实际中δ 较小,则由式(1)~(2)可得三自由度汽车侧倾模型为
1.2 车辆动力学模型验证
车辆横向稳定性试验方法包括静态测试、稳态测试和极限工况测试,其中,极限工况测试可分为闭环试验方法(双线试验法和蛇形试验等)和开环试验方法(J-Turn 转向试验法和鱼钩测试等)[15]。为研究车辆在极限工况下的防侧翻控制,对所建立的侧倾模型进行极限工况下的闭环和开环2 种试验方法进行验证,选择双移线和J-Turn2种典型的工况,将数学模型输出结果与Trucksim结果进行对比,以此验证所建立模型的正确性,仿真需用到的主要参数见表1,其中hc为质心高度,B为轮距。
双移线工况和J-Turn工况仿真结果见图2~3。从图2~3中可以看出,进行双移线工况与J-Turn试验时,所建立的三自由度车辆模型与Trucksim模型的侧向、侧倾以及横摆的动态特性较接近,验证了所建立模型的正确性,因此可以根据所建立的模型以及输出的参数设计控制算法。

表1 整车部分参数表

图2 双移线工况动态特性对比

图3 J-Turn工况动态特性对比
2 防侧翻控制系统设计
2.1 侧翻预警系统
车辆防侧翻控制主要包括侧翻预测和侧翻控制2个方面,为了对客车及时进行有效的防侧翻控制,需要在侧翻危险发生之前对其运行状况进行预测[16],通过侧翻指标判断客车的运动状态,确定是否需要启动防侧翻控制系统。横向载荷转移率(LTR)可以评价和反映车辆的侧翻情况[17],判断车辆运动状态,汽车LTR 定义为左右车轮总的垂直载荷差值与其和之比

LTR的范围为[-1,1],当车辆左右车轮垂直载荷相等时,LTR 为0;当汽车有侧倾运动且未发生侧翻时,|LTR|小于1;当汽车发生侧翻时,一侧车轮将离开地面,该侧垂直载荷变为0,此时|LTR|为1。|LTR|越小,车辆的侧翻稳定性愈好。
根据所建立的三自由度车辆侧倾模型,对车辆侧倾中心取力矩平衡有:

由式(4)~(6)可得

2.2 防侧翻控制策略
车辆在转弯时,对前外轮进行制动所产生的横摆力矩与汽车转弯方向相反,增加车辆的不足转向,可以有效的防止车辆侧翻[18]。文中通过设计1个控制模块,在车辆有侧翻趋势时对前外轮施加制动力。采用的控制策略是利用Trucksim 输出车辆的车速和前轮转角,根据三自由度模型计算φ、ay和LTR,根据|LTR|的大小判断是否需要采取差动制动控制,根据LTR的正负确定需要施加制动力的车轮。模糊PID 控制器根据LTR 的实际值与设定值的偏差得到目标车轮制动压力,由最终的决策模块将制动车轮信息和制动压力信息传递到Trucksim中,控制系统示意图如图4所示。

图4 控制系统示意图
2.3 模糊PID控制器设计

图5 模糊PID控制器结构图
模糊PID 控制器一方面可以利用模糊控制器对PID控制器中的参数KP、KI和KD进行实时调节,满足不同工况下对PID控制器参数的要求,另一方面利用PID 控制器良好的控制效果对系统做出控制[19]。模糊PID 控制系统结构如图5 所示。将客车横向载荷转移率实际值与期望值比较,差值e与差值的变化率ec 作为模糊控制器的输入信号,模糊控制器的输出信号为ΔKP、ΔKI和ΔKD,根据ΔKP、ΔKI和ΔKD对PID 控制器进行参数调节,控制系统输出的参数为车轮制动轮缸压力。
模糊控制策略利用模糊逻辑及近似推理,输出所需要的控制量,对目标进行有效的控制。输入变量e、ec和输出变量u对应的模糊量分别为E、EC和U。其中E的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},EC 的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},U 的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},各个模糊子集的定义为NB(负大),NM(负中),NS(负小),ZO(几乎为零),PS(正小),PM(正中),PB(正大)。误差E和误差变化率EC论域设置为[-3,3],输出信号ΔKP、ΔKI和ΔKD的论域分别设置为[-0.3,0.3]、[-0.06,0.06]和[-3,3]。输入信号和输出信号选取相同类型的隶属函数,隶属函数曲线如图6 所示。由于e、ec 输入包含的模糊语言变量均为7个,因此每个输出参数有49条模糊规则,表2~4为模糊规则表。

图6 输入与输出信号隶属函数曲线

表2 ΔKP模糊规则表
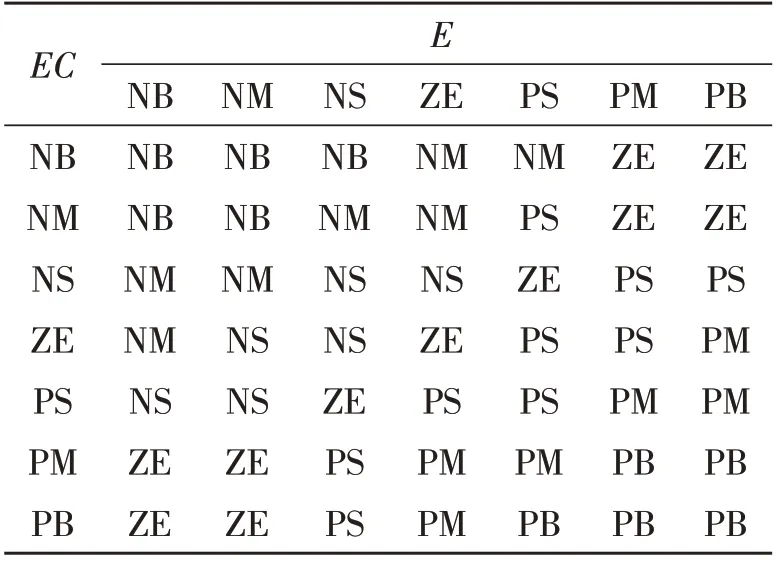
表3 ΔKI模糊规则表

表4 ΔKD模糊规则表
3 控制策略验证
选择鱼钩工况对控制系统进行仿真验证,通过监测试验过程中车辆的侧向加速度、车身侧倾角和横向载荷转移率来判断车辆的运行姿态变化。由于设计的控制系统是针对非绊倒性侧翻的,因此设置路面附着系数为0.85,车速为70 km·h⁻¹,仿真时间为10 s,方向盘的转角输入为Rollover 试验下的Fishhook输入,方向盘转角随时间变化如图7所示。
施加控制和未施加控制汽车的侧向加速度曲线、车身侧倾角和横向载荷转移率曲线分别如图8所示。由图8 可以看出,未施加控制时,客车发生了侧翻。从图8a可知,在没有控制的情况下,侧向加速度最大值的绝对值超过了0.8g,而施加控制后汽车侧向加速度绝对值的最大值小于0.6g,采用控制后侧向加速度峰值降低了0.24g;从图8b 可以看出,施加控制后客车的最大侧倾角不到3°;从图8c可知,由于未施加控制客车发生了侧翻,故|LTR|达到了1,施加控制后LTR控制在[-0.7,0.7]之间。
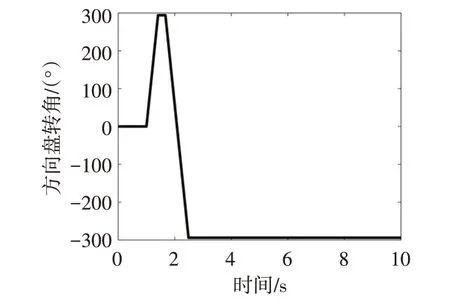
图7 方向盘转角随时间变化
由以上分析及仿真结果可知,由模糊PID控制器控制的车辆防侧翻系统在一定程度上可以有效地对车辆的行驶状态进行干预,采用该控制系统能够降低车辆的侧向加速度和车辆的侧倾角,在一定程度上可以有效防止车辆侧翻。

图8 有控制和无控制时动态特性对比
4 结论
1)建立了三自由度车辆侧倾动力学模型,利用Trucksim软件验证了所建立模型的正确性。
2)采用差动制动控制策略,基于LTR 的反馈设计了模糊PID 控制器,建立了Trucksim 与Simulink联合仿真模型。
3)鱼钩试验工况进行模拟仿真验证了所设计的控制系统的有效性。仿真结果表明所设计的控制系统能够降低车辆的侧向加速度、车辆的侧倾角和横向载荷转移率的绝对值,可以提高车辆的侧倾稳定性,该控制算法能够有效降低侧翻风险。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
北京航空航天大学学报(2021年4期)2021-11-24
电子制作(2019年10期)2019-06-17
汽车观察(2019年2期)2019-03-15
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06
电子制作(2018年14期)2018-08-21
北京汽车(2017年3期)2017-10-14
电子制作(2017年10期)2017-04-18
电子制作(2017年23期)2017-02-02