
基于SolidWorks的自适应式智能树干涂刷装置系统研制与开发
2020-08-13 05:44蒋小辉张官祥
制造业自动化 2020年8期
蒋小辉,胡 川,张官祥,何 煌,葛 佳
(1.三峡大学 科技学院,宜昌 443002;2.中国船级社宜昌分社,宜昌 443000;3.向家坝电厂,宜宾 644600;4.武汉理工大学,武汉 430070;5.上海电力安装第二工程有限公司,上海 201100)
1 树木涂白装置研究状况
目前,我国树木的涂白工作主要由人工完成,但这种传统的人工作业方式存在着涂白质量参差不齐、工作效率低下、涂刷原料浪费过大、涂白剂对人体危害大等缺点。相关科研院校曾经提出一些设计思路及申请了发明专利,但是由于零部件加工难度大、控制系统过于复杂、地面环境适应能力差等因素限制而难以推广[1]。本论文针对人工树木的涂白及我国树干涂刷装置的研究现状,研制一套智能树干涂刷装置,其具有易于控制,适应性较强,工作效率及自动化程度高等优点,以满足公共服务系统对树木涂刷需求[1,2]。
2 自适应式智能树干涂刷装置系统构成
1)移动系统:移动装置包括机架及底盘模块;机架拟采用前置V型卡槽手推车的结构,承重与支撑整个机构。智能树干涂刷装置的车体底盘安装机架,拟采用四轮结构,具有较高的稳定性和对地面的适应性。
2)喷涂机构及其选向、运动机构:喷涂机构作为自适应式智能树干涂刷装置最直接的执行装置,可移动式喷涂机构拟采用4个开度可调型环形喷头以满足不同树径喷刷需求。其选向及运动机构满足环形喷头自动选向、上下运动。
3)传动系统:传动系统作为该智能树干涂刷装置工作的能量传递载体,包括搅拌电机到搅拌装置的传动、可移动式喷涂机构与换向步进电机之间的传动、可移动式喷涂机构与升降电机之间的传动以及开度可调型环形喷头与其开合电机之间的传动。
4)控制系统:智能树干涂刷装置采用基于可编程控制器的控制系统,包括控制器、外围回路、控制流程,以实现供液系统自动加压、可移动式喷涂机构的自动选向、上下运动及喷刷等动作。
5)储能式供液系统:储能式供液系统包括盛放容器及搅拌装置、加压风机、液体输送管道及相应的控制阀门,实现涂覆剂自动储能,避免风机长疲劳损坏。
3 自适应式智能树干涂刷装置三维建模
本文根据树木涂白装置系统构成及功能,基于SolidWorks完成自适应式智能树干涂刷装置三维建模。选择合适的设计类型及结构形式,设计智能涂刷装置总图及零件图,合理设计智能涂刷装置零件及尺寸参数。
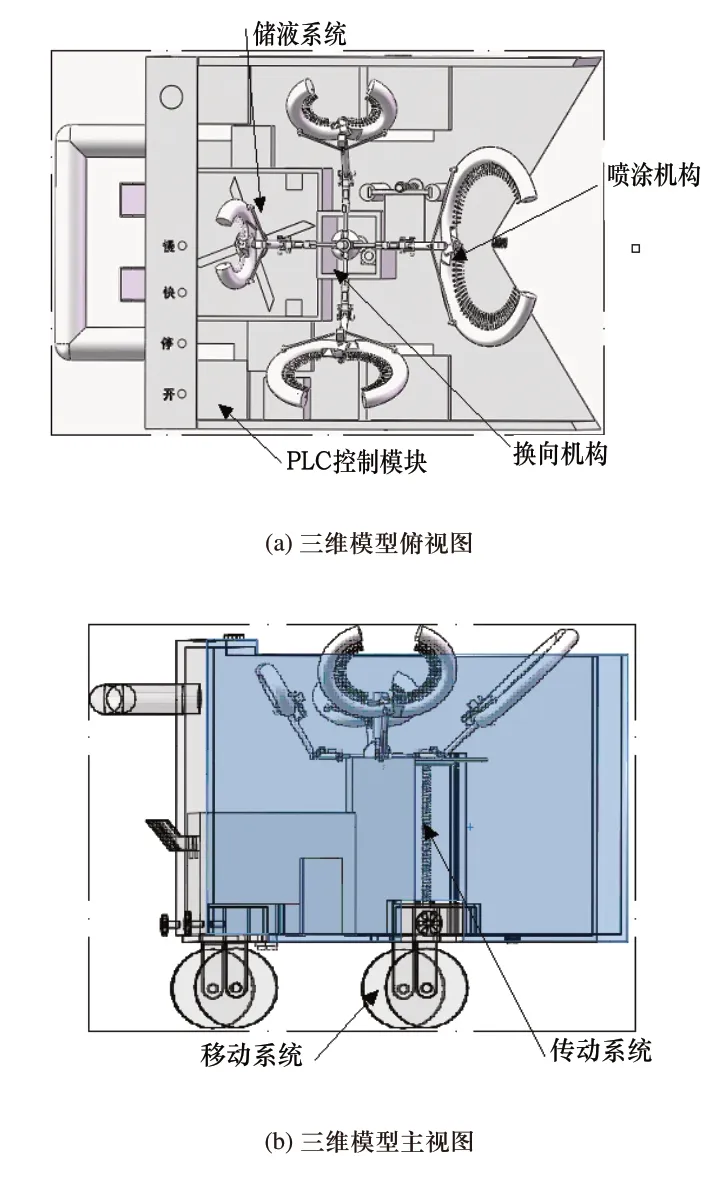
图1 自适应式智能树干涂刷装置系统三维模型图
4 可移动式喷涂机构分析
喷涂机构是自适应式智能树干涂刷装置的核心机构,是满足360°环抱喷涂刷工艺要求的最直接的执行装置,因此对其做必要的运动及力学分析意思重大。
4.1 可移动式喷涂机构运动分析
可移动式喷涂机构驱动电机轴长L1,电机行程L2,树径D。要满足360°环抱喷涂刷工艺要求,则开度可调型环形喷头张开的距离L3=D/2[3]。
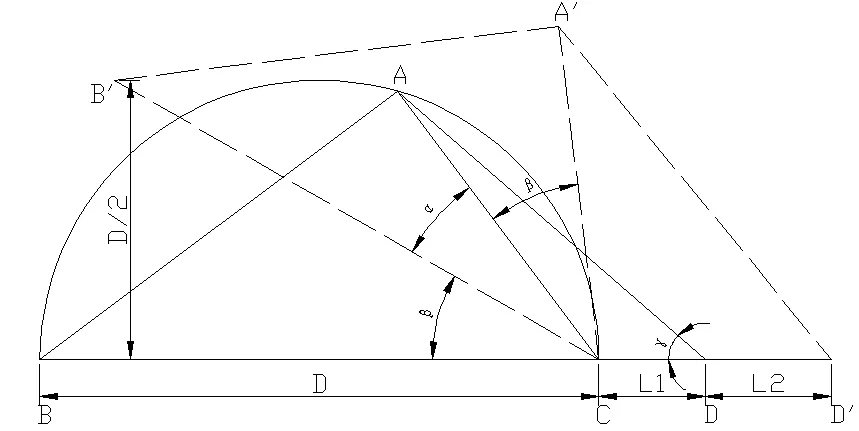
图2 环形喷头运动分析图
式中λ=Dsin(α+30°)cos(α+30°),κ=Dcos2(α+30°)。根据式(4)可求出电机行程L2与驱动电机轴长L1、树径D之间的数学关系。
4.2 支架受力分析及强度计算
支架AD是可移动式喷涂机构中重要受力部件,其力学特性决定着整个机构的机械性能。当装置处于闭合状态时,支架AD受力最大,支架AD承受的力主要来自于开度可调型环形喷头的反作用力F3、推杆电机的推力F1和推杆对支架AD的反作用力F2。支架AD的受力分析:
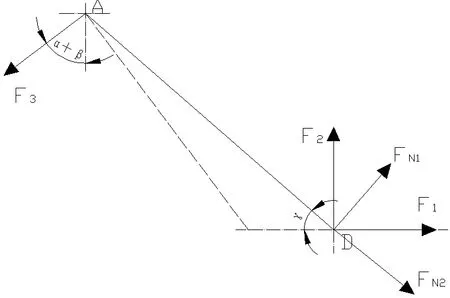
图3 支架受力分析
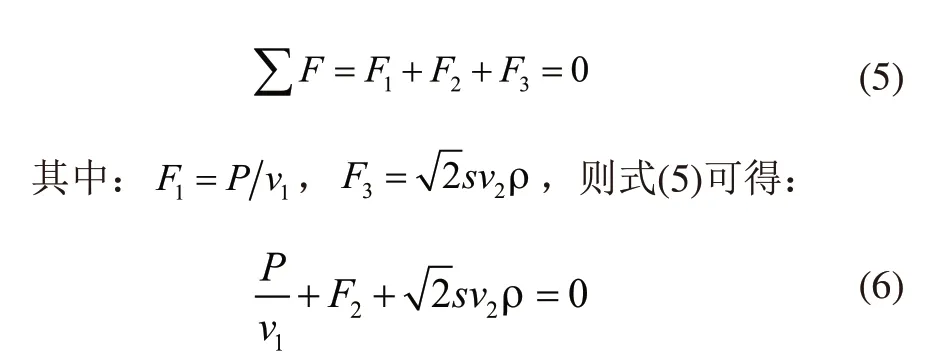
式中P为推力电机的额定功率,v1为推力电机带动杆件水平移动的速度,s为环形喷头总喷流面积,v2为环形喷头的喷流速度,ρ为喷流液体的密度。
以结点D为参考点及旋转中心,计算支架AD的轴力FN1为推力及弯矩M,由结点D的平衡方程:
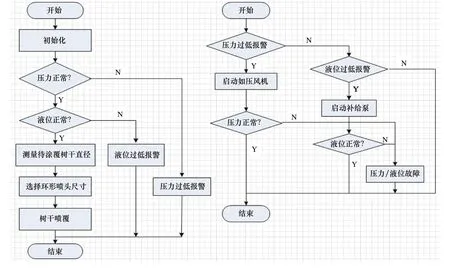
图4 自适应式智能树干涂刷装置工艺流程图
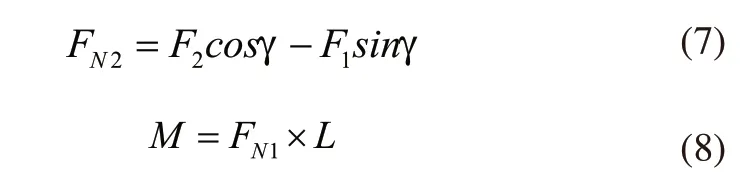
支架AD的所受应力为:
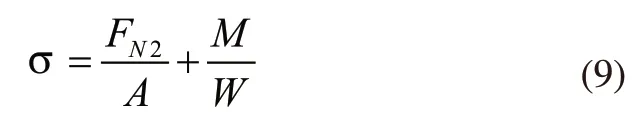
式中A为支架AD的截面积,L为支架AD的长度,W2为支架AD的抗弯截面系,W≈0.1D3。
5 自适应式智能树干涂刷装置涂刷工艺过程
1)涂刷工艺过程
将自适应式智能树干涂刷装置的V型卡槽卡住树杆,可伸缩树径测量仪将其伸缩量采集并传输给可编程控制器,可编程控制器根据计算可得知预刷白树木的大致直径。然后根据计算结果控制步进电机旋转,调节合适大小的环形喷头至开口端,并与树木贴合。然后控制器控制推杆电机运动,在齿轮与齿条的配合下,齿条推动两根支架的铰接端运动,使两个环形喷头将树木环抱箍紧,接着控制器控制加压风机对涂覆剂存储箱内加压,同时控制电磁阀开启,使涂覆剂沿管道进入可伸缩软管内,将涂覆剂喷涂在树干上,于此同时,升降电机开始工作,升降台通过定位磁体与次连接杆定位连接,并推动环形喷头升降,完成树干刷白作业[4]。
2)储能式供液压力及液位控制过程
自适应式智能树干涂刷装置在进行树干涂覆时,对涂覆剂的液位和压力有严格要求,涂覆剂应保持一定压力及液位,以便其足量的喷覆在树干表面,满足树干防虫、保暖要求。运行中控制器实时检测涂覆剂压力、液位,当低于要求值时,则控制加压风机及补给泵启动补充涂覆剂及其压力。
3)涂覆剂搅拌工艺过程
为了保证自适应式智能树干涂刷装置正常、可靠工作,涂覆剂必须保证一定的溶解度要求,当自适应式智能树干涂刷装置开启后,控制器则开出指令,驱动搅拌电机运行,带动涂覆剂翻动,防止涂覆剂沉淀,保证涂覆剂的溶解度要求。
自适应式智能树干涂刷装置完成整个树干涂覆工艺流程如图4所示。
6 结语
文章依据我国林木涂白现状,提出一种自适应式智能树干涂刷装置。首先对该装置基于SolidWorks三维建模,分析其重要部件环形喷头及支架的运动及受力,根据计算结果进一步优化模型[5]。该自适应式智能树干涂刷装置基于可编程控制器实现传动系统、储能式供液系统及喷涂机构换向系统之间的联动与配合,自动完成树干测量、喷头尺寸选择及涂覆工作。同时集成可升降式移动系统能够实现不同环境下完成涂刷作业,大大提高该装置的适应能力。
猜你喜欢
军事文摘(2021年16期)2021-11-05
天津科技大学学报(2021年1期)2021-02-25
中国电气工程学报(2020年5期)2020-10-27
重型机械(2020年3期)2020-08-24
中国特种设备安全(2019年10期)2020-01-04
雷达学报(2018年1期)2018-04-04
电子制作(2017年17期)2017-12-18
小猕猴学习画刊(2017年1期)2017-02-17
小猕猴学习画刊(2017年1期)2017-02-17
电子制作(2016年19期)2016-08-24
