
概念设计阶段动力总成悬置系统解耦设计
2020-08-18 02:41陈景昌
工程与试验 2020年2期
赵 涛,陈景昌,2
(1.中国汽车工程研究院股份有限公司,重庆 401122; 2.汽车噪声及振动控制国家重点实验室,重庆 401122)
1 引 言
汽车振动的主要激励来源为动力总成及路面激励,路面激励主要依靠悬架系统进行隔振,动力总成系统隔振主要依靠悬置系统。基于Torque Roll Axis (TRA)的悬置布置可以对动力总成悬置系统各阶刚体模态进行解耦设计,从而获取更佳的NVH性能[1,2]。
本文详细介绍概念设计阶段的悬置系统的TRA布置及刚度设计方法,以保证悬置系统关键模态的合理布置,以期达到更好的悬置系统隔振性能,提高汽车的乘车舒适性[3,4]。
2 动力总成系统模型描述
2.1 简化模型
动力总成-悬置系统在较低频率范围(低于动力总成的最低阶弹性弯曲振动模态频率)的隔振设计可以只考虑其刚体振动模态,动力总成悬置系统如图1所示。根据模态理论,其振动特性可描述为[1]:
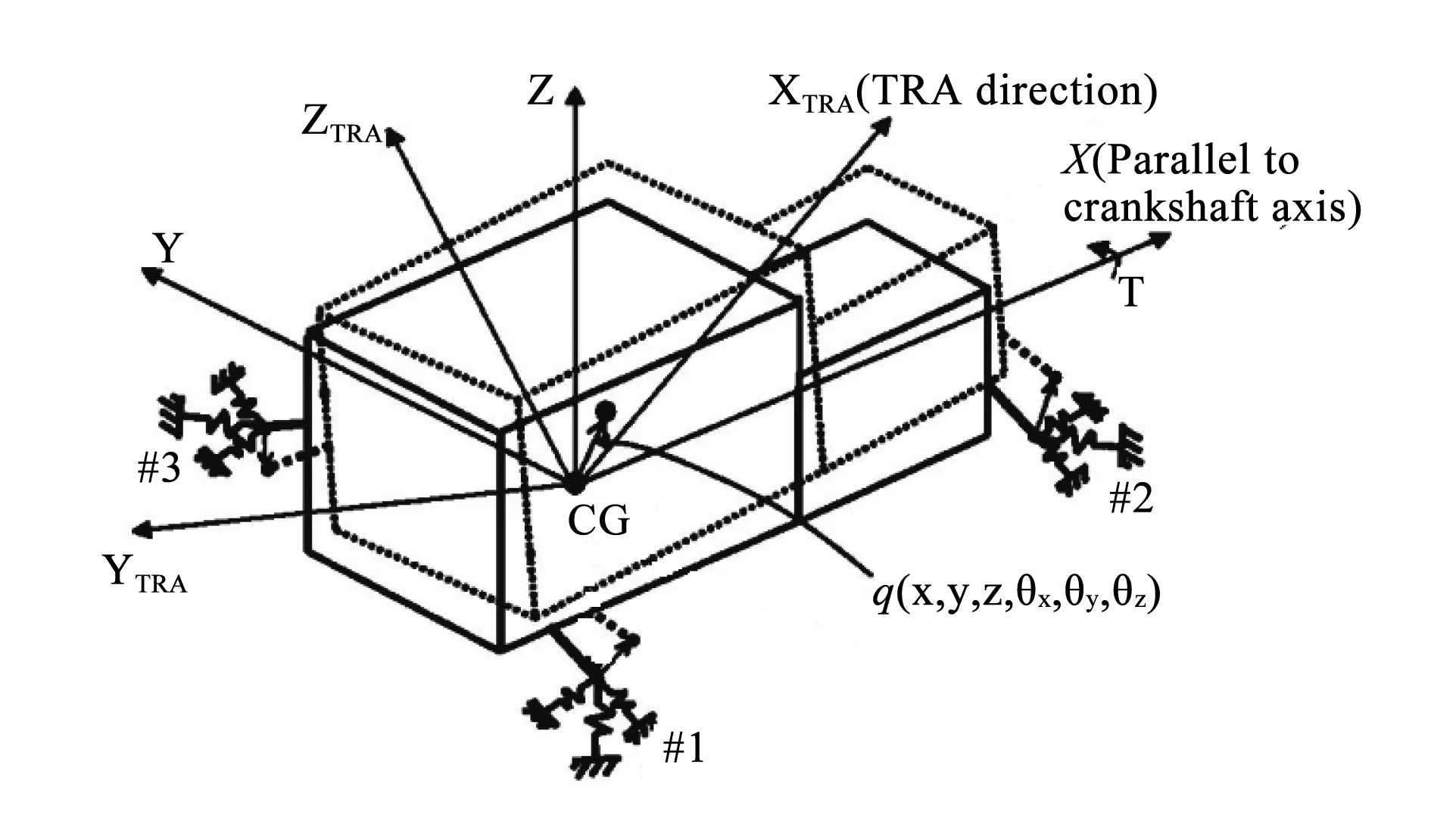
图1 动力总成悬置系统简化模型

式中,M为系统广义质量矩阵,K为系统广义刚度矩阵,q为系统广义坐标向量。
q=(x,y,z,θx,θy,θz)
2.2 扭转轴坐标系
动力总成为一自由刚体,当绕曲轴方向有一个扭矩时,它将绕空间一条轴线转动,这条轴线就是扭矩轴,扭矩轴为无约束三维刚体的旋转轴。以过质心平行于扭矩轴的轴为扭矩轴坐标系的XTRA轴,其它两坐标轴可以任意选取,建立扭矩轴坐标系。扭转轴坐标系定义由其转动惯量张量确定[3]。
在动力总成坐标系下,转动惯量张量可描述为:
在动力总成坐标系中可描述为:

其中,a为正则因子,J为惯量张量I的逆矩阵。
3 悬置位置选择
为确定悬置点位置,首先需要确定动力总成在整车状态下或相对动力总成质心的空间限制,设定动力总成的相对边界条件,需考虑悬置与车身/底盘结构连接的安装、动力总成附件的间距要求等[5]。通常可以指定两点如右上前限位URL(Upper Right Limit)和左下后限位LLL(Lower Left Limit)来确定动力总成的布置空间,如图2所示。
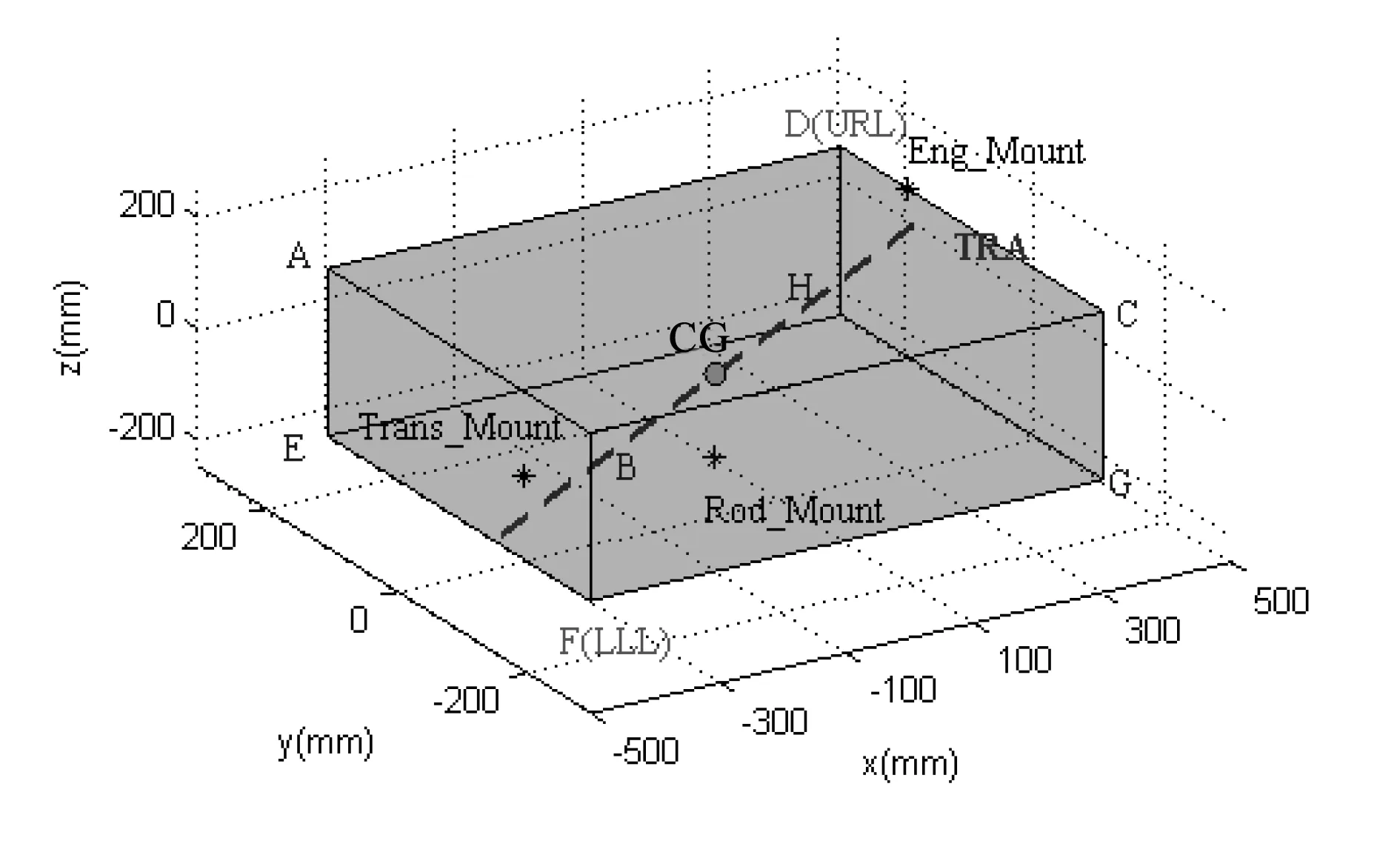
图2 动力总成布置空间
悬置位置点发动机侧悬置Eng_Mount和变速箱侧悬置Trans_Mount的x/y坐标可以由TRA轴与动力总成空间布置空间包络交点确定,z坐标可以在保证两悬置连线与TRA轴完全平行下,根据实际情况进行调整。
悬置位置点Rod_Mount坐标可以任意选择在动力总成坐标系ZX平面内某点,只需保证该点与质心的连线垂直于TRA即可。
4 悬置刚度确定
动力总成的模态频率、最大允许位移、静变形以及橡胶设计等均约束悬置刚度的设计。
4.1 悬置Z方向刚度设计
动力总成的静位移由悬置的Z向刚度确定,可以定义为:
其中,kzi为悬置的Z向刚度,M为动力总成质量,zst为动力总成最大允许位移。
对于拉杆式三点悬置系统(如图3所示),动力总成的质量主要依靠Eng_Mount和Trans_Mount的Z方向刚度承担。为保证动力总成的Bounce和Pitch模态解耦,需保证k1*x1-k2*x2=0。
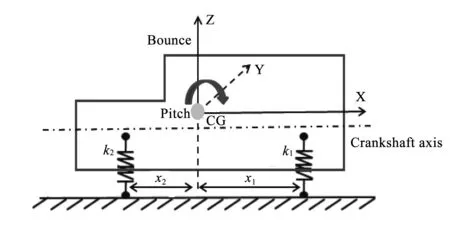
图3 动力总成布置后视图
动力总成Bounce的频率由两悬置的Z向刚度决定,反推悬置的刚度为:
后悬置Rod_Mount的Z向刚度不作限制,尽量取最小值,以便于模态的完全解耦设计。
4.2 悬置Y方向刚度设计
动力总成在TRA坐标系下,需保证在该坐标系下动力学平衡,同时受fTRA控制,具体计算如下:
4.3 悬置X方向刚度设计
动力总成的位移容许偏移量决定了悬置X方向刚度,在悬置设计的典型工况(最大扭矩转向)下,动力总成沿X方向最大的加速度为1g。为保证悬置反作用力和力矩平衡[6],悬置M1的X方向刚度计算如下:
同时,悬置M2的X向刚度kx2=|z1/z2|。
5 悬置系统设计实例
在悬置系统的正向开发过程中,计算TRA坐标系的完全解耦状态下的悬置点位置、悬置刚度,需提供以下参数:动力总成质量、惯量参数、设计的fTRA频率、设计的fBounce频率、动力总成的空间限制尺寸、最大容许X向位移。以某款动力总成为例,编制Matlab程序,根据动力总成参数计算结果如图4所示。
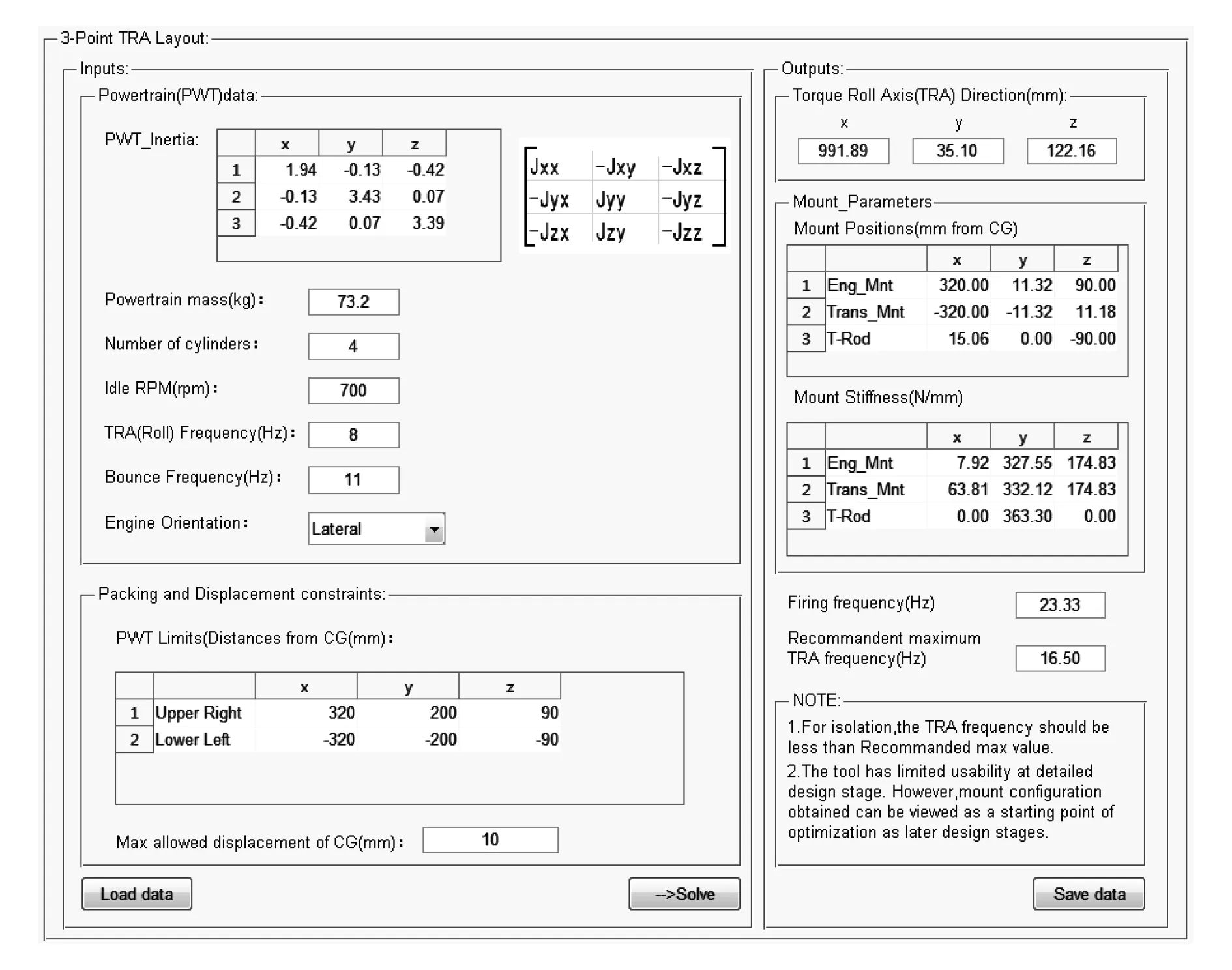
图4 动力总成悬置系统正向设计实例
根据计算结果的悬置位置及刚度,计算TRA轴在动力总成坐标系下位置,如图5所示。TRA轴与动力总成坐标系下夹角为(7.3°,88.0°,83.0°)。悬置Mnt1与Mnt2在俯视图上与TRA轴完全重合,在正视图上完全平行。

图5 TRA轴动力总成坐标系下布置
根据悬置位置及刚度计算动力总成悬置系统的模态解耦结果,如图6所示。悬置系统的初始设计fTRA频率和fBounce频率均可以完全吻合,且各个方向的模态解耦率均接近100%。
6 结 论
本文详细介绍了悬置系统基于TRA轴的正向开发过程,
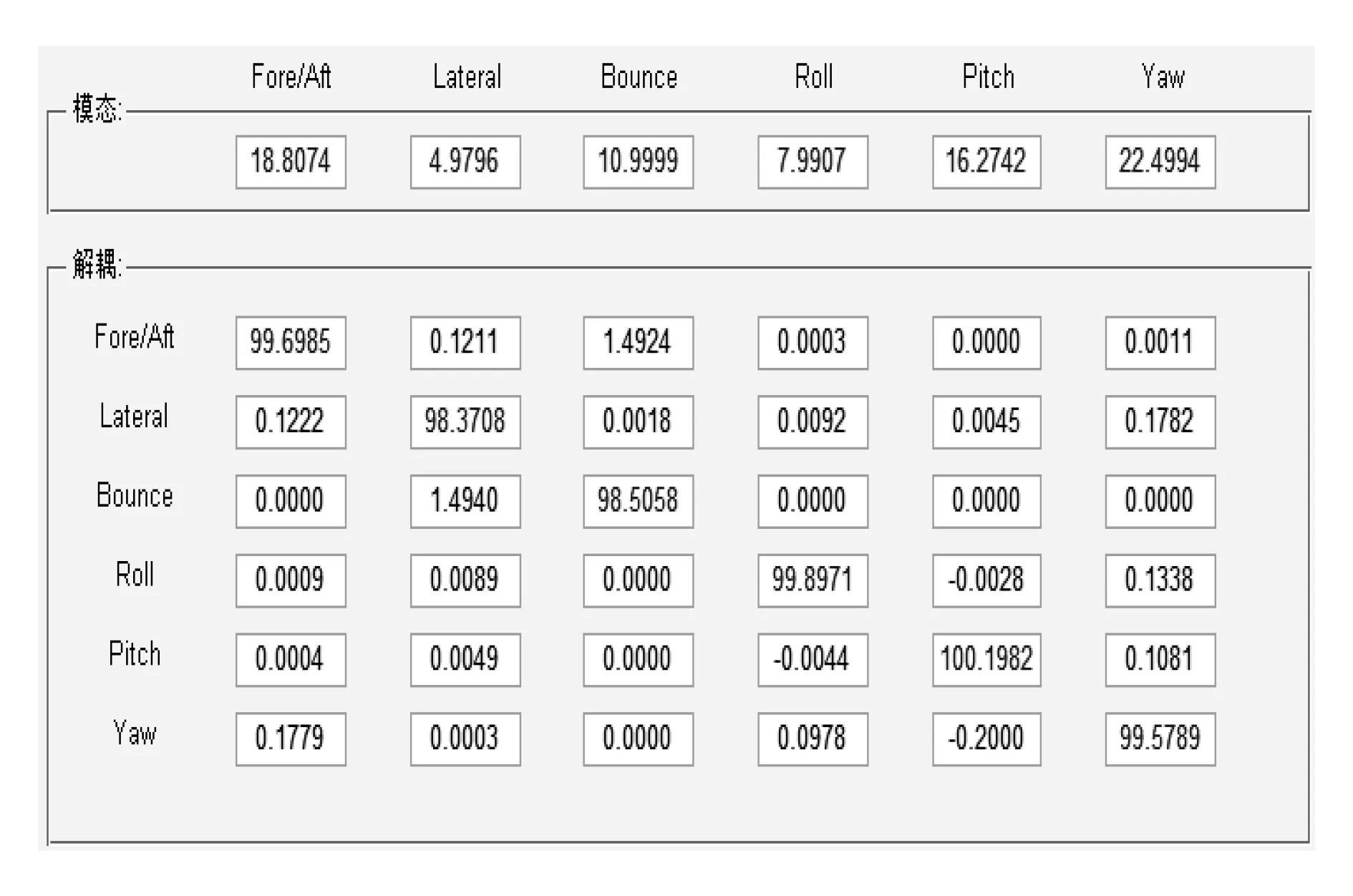
图6 悬置系统解耦模态计算
并给出了各悬置每个方向刚度的设计原则和悬置点位置布置方法。某款动力总成的正向开发过程计算结果表明,悬置系统的初始设计fTRA频率和fBounce频率均可以完全吻合,且各个方向的模态解耦率均接近100%。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
昆明医科大学学报(2022年3期)2022-04-19
导航定位学报(2022年2期)2022-04-11
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
装备制造技术(2020年2期)2020-12-14
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
凿岩机械气动工具(2017年3期)2017-11-22
中国机械工程(2015年13期)2015-12-16
振动、测试与诊断(2014年4期)2014-03-01
